任务
- 完成STM32F103R6在Proteus上仿真运行
- 使用LCD屏幕作为显示,编写驱动
- 驱动DHT11,用于采集模拟温湿度
- 驱动串口1,用于进行串口通信
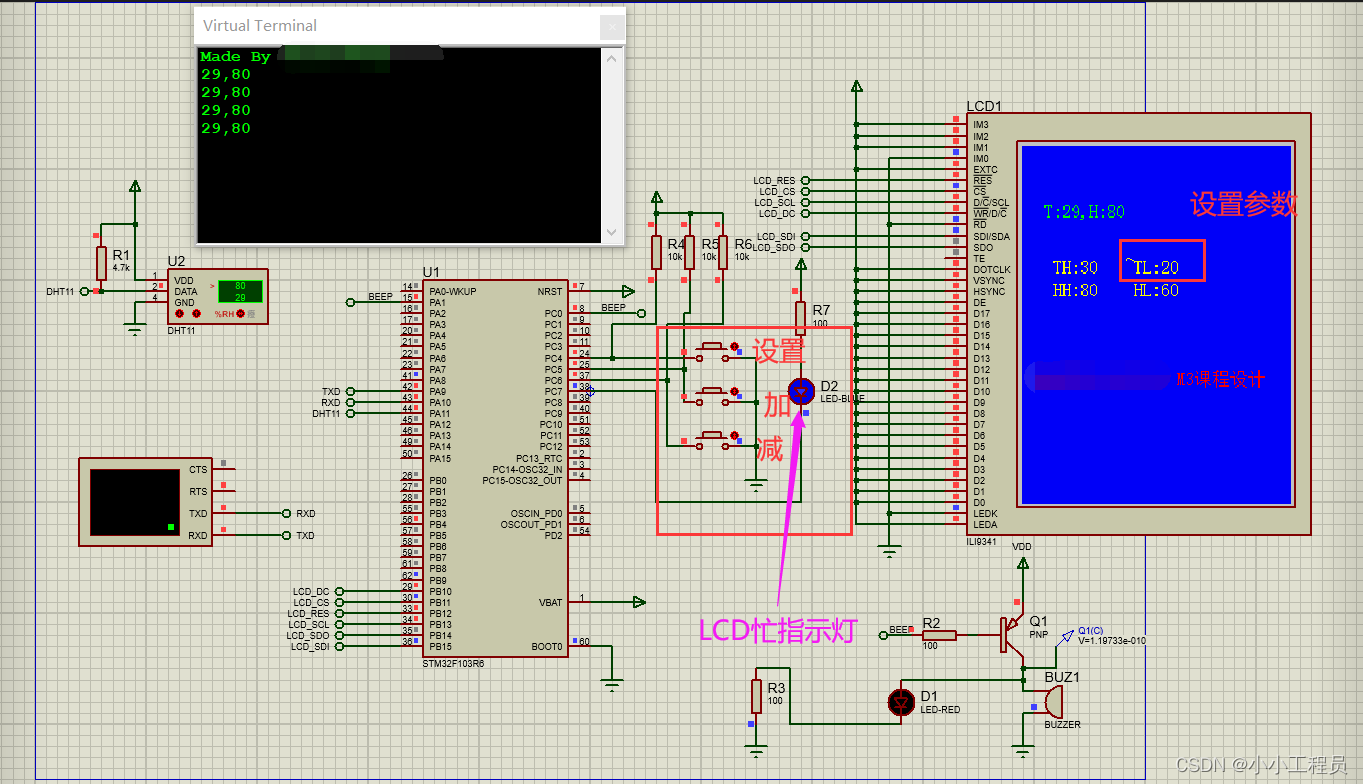
- 按键可设置阈值
- 超出阈值报警
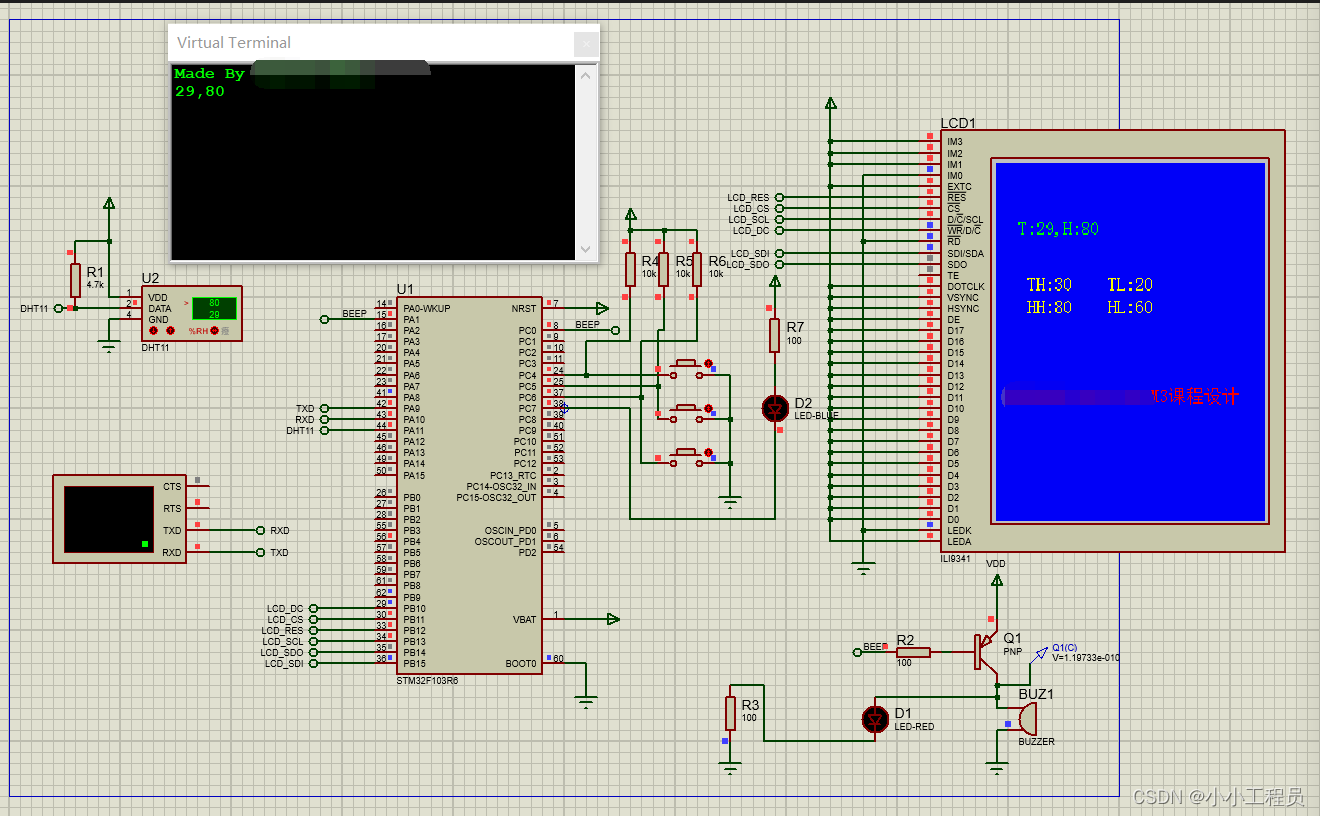
效果
 特别注意:
特别注意:
-
一般外部晶振不太好用。使用内部的HSI晶振,当前项目频率设置为40MHz。
-
本工程使用的是Protesu8.9SP2版本。
源代码
/*******************************************************************************
\* 文件名称:基于STM32的DHT11和LCD显示串口通信仿真
\* 实验目的:1.
\* 2.
\* 程序说明:完整程序Q:2772272579;@: itworkstation@ hotmail.com
\* 日期版本:本项目分享关键细节,熟悉使用单片机的可做参考代码。完整讲解+源代码工程可联系获取,可定制。
*******************************************************************************/
#include "main.h"
#include "delay.h"
#include "USART1.h"
#include "gui.h"
#include "lcd.h"
#include "dht11.h"
#include "BEEP.h"
#include "key.h"
void Proc_Key(void);
u8 LCD_SetNow=0;
u8 TH=30,TL=20;
u8 HH=80,HL=60;
void LCD_SHOW(void);
char buff[128];
int main(void)
{
u8 T,H;
u16 readTime = 0;
BEEP_Init();
BEEP_Tips(1);
Key_Init();
USART1_Config();
printf("Made By ****\r\n");
LCD_Init();
DHT11_InAndOutConfig();
Show_Str(10,200,RED,0,(u8 *)"************ M3课程设计\r\n",16,1);//字体颜色为RED //非叠加方式
POINT_COLOR = GREEN;
BACK_COLOR = BLUE;
LCD_SHOW();
while(1)
{
if(readTime>500)
{
readTime = 0;
DHT11_ReadTAndH(&T,&H);
printf("%d,%d\r\n",T,H);
sprintf(buff,"T:%d,H:%d",T,H);
LCD_ShowString(20,50,16,(u8 *)buff,0);
if((T>TH || T <TL)||(H > HH || H < HL))
{
BEEP_Control(ON);
}
else
{
BEEP_Control(OFF);
}
}
Proc_Key();
readTime++;
Delay_nms(1);
}
}
/*
功能要求:
首先在串口上显示当前的温湿度数值,在屏幕上也显示小组成员信息以及温湿度数值,
设置温度和湿度的报警值,如果当前的温度或者湿度超过报警值,则蜂鸣器响,如果没
有超过报警值则蜂鸣器不响,按下按键的话LED灯亮或者灭交替执行。
*/
void Proc_Key2Add(void);
void Proc_Key3Dec(void);
void Proc_Key(void)
{
u8 keyValue = 0xff;
keyValue = Key_Scan();
if(keyValue != 0xff)
{
switch(keyValue)
{
case 1:
LCD_SetNow++;
if(LCD_SetNow > 4)
{
LCD_SetNow = 0;
}
break;
case 2:
Proc_Key2Add();
break;
case 3:
Proc_Key3Dec();
break;
default:break;
}
LCD_SHOW();
GPIO_SetBits(GPIOC,GPIO_Pin_7); //LED指示灯,按键松开
}
}
void LCD_SHOW(void)
{
u16 POINT_COLOR_LAST = 0x0000,BACK_COLOR_LAST = 0xFFFF;
POINT_COLOR_LAST = POINT_COLOR;
BACK_COLOR_LAST = BACK_COLOR;
POINT_COLOR = YELLOW;
BACK_COLOR = BLUE;
switch(LCD_SetNow)
{
case 0:
sprintf(buff," TH:%d TL:%d",TH%100,TL%100);
LCD_ShowString(20,100,16,(u8 *)buff,0);
sprintf(buff," HH:%d HL:%d",HH%100,HL%100);
LCD_ShowString(20,120,16,(u8 *)buff,0);
break;
case 1:
// sprintf(buff,"~TH:30 TL:10",TH,TL);
sprintf(buff,"~TH:%d TL:%d",TH%100,TL%100);
LCD_ShowString(20,100,16,(u8 *)buff,0);
sprintf(buff," HH:%d HL:%d",HH%100,HL%100);
LCD_ShowString(20,120,16,(u8 *)buff,0);
break;
case 2:
sprintf(buff," TH:%d ~TL:%d",TH%100,TL%100);
LCD_ShowString(20,100,16,(u8 *)buff,0);
sprintf(buff," HH:%d HL:%d",HH%100,HL%100);
LCD_ShowString(20,120,16,(u8 *)buff,0);
break;
case 3:
sprintf(buff," TH:%d TL:%d",TH%100,TL%100);
LCD_ShowString(20,100,16,(u8 *)buff,0);
sprintf(buff,"~HH:%d HL:%d",HH%100,HL%100);
LCD_ShowString(20,120,16,(u8 *)buff,0);
break;
case 4:
sprintf(buff," TH:%d TL:%d",TH%100,TL%100);
LCD_ShowString(20,100,16,(u8 *)buff,0);
sprintf(buff," HH:%d ~HL:%d",HH%100,HL%100);
LCD_ShowString(20,120,16,(u8 *)buff,0);
break;
default:break;
}
POINT_COLOR = POINT_COLOR_LAST;
BACK_COLOR = BACK_COLOR_LAST;
}
void Proc_Key2Add(void)
{
switch(LCD_SetNow)
{
case 0:
break;
case 1:
TH++;
if(TH>99)
TH = 99;
break;
case 2:
TL++;
if(TL>=TH)
TL = TH-2;
break;
case 3:
HH++;
if(HH>99)
HH = 99;
break;
case 4:
HL++;
if(HL>=HH)
HL = HH-2;
break;
default:break;
}
}
void Proc_Key3Dec(void)
{
switch(LCD_SetNow)
{
case 0:
break;
case 1:
TH--;
if(TH<=TL)
TH = TL+2;
break;
case 2:
TL--;
if(TL<1)
TL = 1;
break;
case 3:
HH--;
if(HH<=HL)
HH = HL+2;
break;
case 4:
HL--;
if(HL<1)
HL = 1;
break;
default:break;
}
}
DHT11模块驱动
#ifndef _DHT11_H_
#define _DHT11_H_
#include "stm32f10x.h"
#define DHT11_HL(x) x?(GPIOA->ODR |= (1<<11)):(GPIOA->ODR &= ~(1<<11))
#define DHT11_RD() (GPIOA->IDR & (1<<11))
void DHT11_InAndOutConfig(void);
u8 DHT11_ReadTAndH(u8 *t,u8 *h);
#endif
#include "dht11.h"
#include "delay.h"
#include "stdio.h"
/*
函数名:DHT11_InAndOutConfig
函数功能:DHT11管脚配置为输入/输出功能 --PA11
函数参数:flag 0 -- 输入 1 -- 输出
函数返回值:无
*/
void DHT11_InAndOutConfig(void)
{
//打开A端口时钟 -- PA11
RCC->APB2ENR |= (1<<2);
GPIOA->CRH &= ~(0xf<<11);
GPIOA->CRH |= (0x3<<11);//推挽输出
}
/*
函数名:DHT11_ReadTAndH
函数功能:DHT11读取温度和湿度值
函数参数:t -- 保存温度值 h -- 湿度值
函数返回值:0 -- 不成功 1 -- 成功
*/
u8 DHT11_ReadTAndH(u8 *t,u8 *h)
{
u8 rxbuffer[5];//保存40位数据
u8 i,j;
u32 errortime=0;
//1.MCU发送开始信号
//1.1 配置为输出模式
GPIOA->CRH &= ~(0xf<<11);
GPIOA->CRH |= (0x3<<11);
//1.2 输出18ms的低电平
DHT11_HL(0);
Delay_nms(18);
//1.3 输出高电平(20~40us)
DHT11_HL(1);
Delay_us(20);
//2.DHT11返回应答信号
//配置为输入模式
GPIOA->CRH &= ~(0xf<<11);
GPIOA->CRH |= (0x4<<11);
while(DHT11_RD())//等待应答信号,低电平到来
{
if(errortime++>0xfffff) // 2^40 -1
return 0;
}
errortime = 0;
while(DHT11_RD() == 0)//等待应答信号,高电平到来
{
if(errortime++>0xfffff)
return 0;
}
errortime = 0;
//3.DHT11发送40位数据
for(i=0;i<5;i++)
{
for(j=0;j<8;j++)
{
while(DHT11_RD()) //等待数据到来(低电平)
{
if(errortime++>0xfffff)
return 0;
}
errortime = 0;
while(DHT11_RD() == 0)//等待数据到来(高电平)
{
if(errortime++>0xfffff)
return 0;
}
errortime = 0;
Delay_us(30);
rxbuffer[i]<<=1;
if(DHT11_RD())
rxbuffer[i]++;
}
}
//4.校验和
if(rxbuffer[4] == (rxbuffer[0]+rxbuffer[1]+rxbuffer[2]+rxbuffer[3]))
{
*t = rxbuffer[2];
*h = rxbuffer[0];
return 1;
}
else
return 0;
}
串口驱动
#ifndef _USART1_H_
#define _USART1_H_
#include "stm32f10x.h"
#include "stdio.h"
void USART1_Config(void);
void USART1_Echo(void);
#endif
#include "USART1.h"
//USART1 Tx:PA9 Rx:PA10
void USART1_Config(void)
{
//时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
//GPIO
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//USART1
USART_InitTypeDef USART1_InitStructure;
USART1_InitStructure.USART_BaudRate = 9600;
USART1_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART1_InitStructure.USART_Mode = USART_Mode_Rx|USART_Mode_Tx;
USART1_InitStructure.USART_Parity = USART_Parity_No;
USART1_InitStructure.USART_StopBits = USART_StopBits_1;
USART1_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&USART1_InitStructure);
USART_Cmd(USART1,ENABLE);
}
void USART1_Echo(void)
{
u8 ch = 0;
while(USART_GetFlagStatus(USART1,USART_FLAG_RXNE) == 0);
ch = USART_ReceiveData(USART1);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == 0);
USART_SendData(USART1,ch);
}
int fputc(int c, FILE *stream)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == 0);
USART_SendData(USART1,c);
return c;
}