目录
效果展示
-
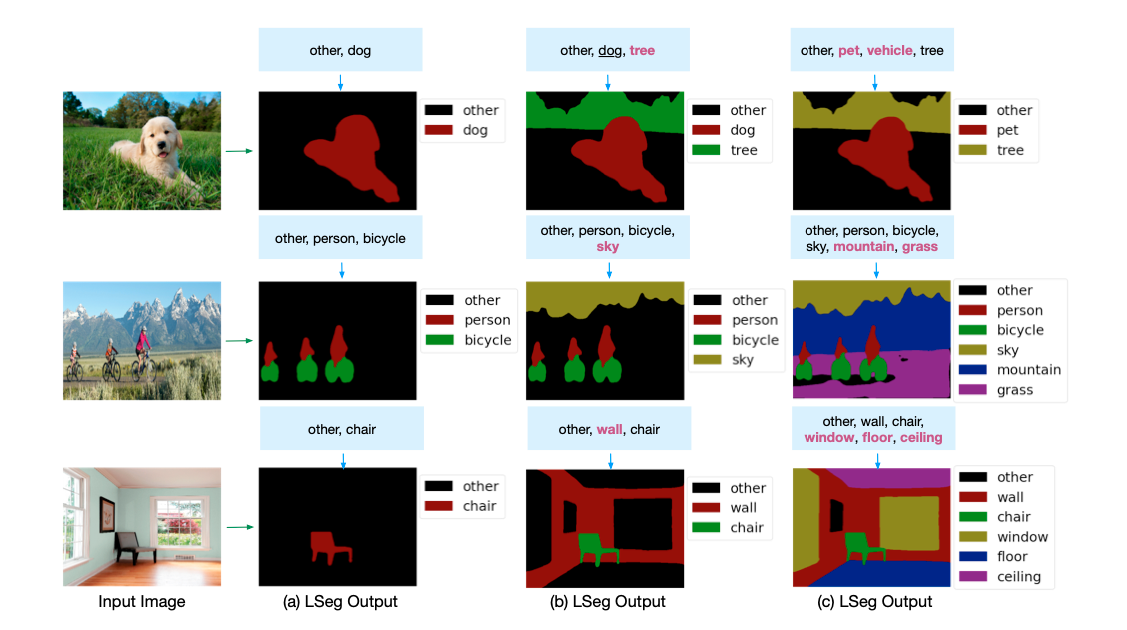
通过控制文本标签,驱动模型对特定物体进行语义分割:
引言
在计算机视觉领域,图像语义分割是一项至关重要的任务,其目标是理解图像中的对象及其相互关系。近年来,一种新的趋势是将文本信息融合到图像语义分割中,这被称为文本驱动的图像语义分割。本文将深入探讨这种新方法的原理、实现及未来前景。
1. 什么是文本驱动的图像语义分割?
文本驱动的图像语义分割是一种将文本描述与视觉信息相结合,以改善语义分割性能的方法。在这种方法中,模型不仅仅需要理解视觉信息,而且还需要理解文本信息,并将这两种信息整合起来进行决策。
2. 为什么要使用文本驱动的图像语义分割?
在许多情况下,文本信息可以提供额外的上下文,有助于解决视觉信息中的歧义。例如,如果一个图像中有一个物体,我们可能无法确定它是狗还是猫。但如果我们有一个文本描述说“这是一只狗”,那么我们就能确定这个物体是狗。因此,文本信息可以提供有用的先验知识,帮助我们更好地理解图像。
3. 如何实现文本驱动的图像语义分割?
实现文本驱动的图像语义分割的关键是如何整合文本信息和视觉信息。一种常见的方法是使用深度学习模型,如卷积神经网络(CNN)和长短期记忆网络(LSTM)。
-
卷积神经网络:CNN是一种特别适合处理图像的深度学习模型。它可以自动提取出图像中的重要特征,用于后续的决策。
-
长短期记忆网络:LSTM是一种特别适合处理序列数据的深度学习模型,如文本。它可以理解文本的语义和语境,并将这些信息编码为一个向量。
在这种方法中,首先使用CNN提取图像特征,然后使用LSTM提取文本特征。最后,将这两种特征整合起来,输入到一个分类器进行决策。
4. 算法介绍
-
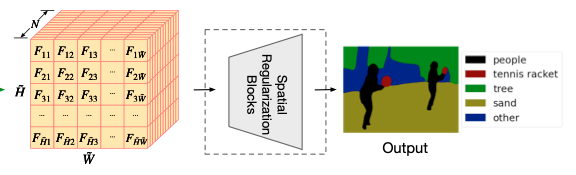
模型架构图:

-
通过上面这个模型架构图可以看到,整个 LSeg 模型分为三个主要部分:
-
图像编码网络
-
通过一个 CNN 或者 Transformer 模型,文章中测试了 ViT 和 CLIP 模型,用于编码图像特征:

-
-
文本编码网络
-
通过一个 Transformer 模型,文章中测试了 CLIP 模型,用于编码文本特征:

-
-
特征融合网络
-
使用一些 CNN 模块融合图像和文本特征,并生成图像分割结果:
-
-
-
算法思路:
-
模型训练时与常规的图像语义分割模型类似,同样使用有标签的语义分割数据,做一个有监督训练
-
不同的是,训练时将图像的语义标签作为额外的输入,转换为特定维度的文本特征,控制分割输出的类别和类别数量
-
这样就可以使用多个不同的语义分割数据集进行融合训练,即使他们的标签不尽相同,也可以正常的训练模型
-
因为相比 CLIP 这样的模型使用的数据规模而言,现在能使用的有标注的语义分割数据规模还是比较小的,所以训练时 CLIP 的模型参数不更新,以免劣化模型的效果。
-
通过 CLIP 这样的文本编码网络引入文本特征,就可以轻松的实现文本驱动的语义分割模型了
-
5. 依赖安装
- 安装一下 PaddleNLP 和 PaddleClas
In [ ]
!pip install paddleclas paddlenlp ftfy regex --upgrade6. 模型搭建
6.1 图像编码器
-
这里采用了 Vision Transformer 模型作为图像编码器
-
为了更好地提取图像的特征信息,对模型做了一些微小的修改
-
提取多层级的模型输出特征
-
添加一个特征后处理的小网络
-
删除了原来模型输出的 Norm 和 Linear 层
-
In [2]
import math
import paddle
import paddle.nn as nn
import paddle.nn.functional as F
from paddleclas.ppcls.arch.backbone.model_zoo.vision_transformer import VisionTransformer
class Slice(nn.Layer):
def __init__(self, start_index=1):
super(Slice, self).__init__()
self.start_index = start_index
def forward(self, x):
return x[:, self.start_index:]
class AddReadout(nn.Layer):
def __init__(self, start_index=1):
super(AddReadout, self).__init__()
self.start_index = start_index
def forward(self, x):
if self.start_index == 2:
readout = (x[:, 0] + x[:, 1]) / 2
else:
readout = x[:, 0]
return x[:, self.start_index:] + readout.unsqueeze(1)
class Transpose(nn.Layer):
def __init__(self, dim0, dim1):
super(Transpose, self).__init__()
self.dim0 = dim0
self.dim1 = dim1
def forward(self, x):
prems = list(range(x.dim()))
prems[self.dim0], prems[self.dim1] = prems[self.dim1], prems[self.dim0]
x = x.transpose(prems)
return x
class Unflatten(nn.Layer):
def __init__(self, start_axis, shape):
super(Unflatten, self).__init__()
self.start_axis = start_axis
self.shape = shape
def forward(self, x):
return paddle.reshape(x, x.shape[:self.start_axis] + [self.shape])
class ProjectReadout(nn.Layer):
def __init__(self, in_features, start_index=1):
super(ProjectReadout, self).__init__()
self.start_index = start_index
self.project = nn.Sequential(nn.Linear(2 * in_features, in_features), nn.GELU())
def forward(self, x):
readout = x[:, 0].unsqueeze(1).expand_as(x[:, self.start_index :])
features = paddle.concat((x[:, self.start_index :], readout), -1)
return self.project(features)
class ViT(VisionTransformer):
def __init__(self, img_size=384, patch_size=16, in_chans=3, class_num=1000,
embed_dim=1024, depth=24, num_heads=16, mlp_ratio=4, qkv_bias=True,
qk_scale=None, drop_rate=0, attn_drop_rate=0, drop_path_rate=0,
norm_layer='nn.LayerNorm', epsilon=1e-6, **kwargs):
super().__init__(img_size, patch_size, in_chans, class_num, embed_dim,
depth, num_heads, mlp_ratio, qkv_bias, qk_scale, drop_rate,
attn_drop_rate, drop_path_rate, norm_layer, epsilon, **kwargs)
self.patch_size = patch_size
self.start_index = 1
features = [256, 512, 1024, 1024]
readout_oper = [
ProjectReadout(embed_dim, self.start_index) for out_feat in features
]
self.act_postprocess1 = nn.Sequential(
readout_oper[0],
Transpose(1, 2),
Unflatten(2, [img_size // 16, img_size // 16]),
nn.Conv2D(
in_channels=embed_dim,
out_channels=features[0],
kernel_size=1,
stride=1,
padding=0,
),
nn.Conv2DTranspose(
in_channels=features[0],
out_channels=features[0],
kernel_size=4,
stride=4,
padding=0,
dilation=1,
groups=1,
),
)
self.act_postprocess2 = nn.Sequential(
readout_oper[1],
Transpose(1, 2),
Unflatten(2, [img_size // 16, img_size // 16]),
nn.Conv2D(
in_channels=embed_dim,
out_channels=features[1],
kernel_size=1,
stride=1,
padding=0,
),
nn.Conv2DTranspose(
in_channels=features[1],
out_channels=features[1],
kernel_size=2,
stride=2,
padding=0,
dilation=1,
groups=1,
),
)
self.act_postprocess3 = nn.Sequential(
readout_oper[2],
Transpose(1, 2),
Unflatten(2, [img_size // 16, img_size // 16]),
nn.Conv2D(
in_channels=embed_dim,
out_channels=features[2],
kernel_size=1,
stride=1,
padding=0,
),
)
self.act_postprocess4 = nn.Sequential(
readout_oper[3],
Transpose(1, 2),
Unflatten(2, [img_size // 16, img_size // 16]),
nn.Conv2D(
in_channels=embed_dim,
out_channels=features[3],
kernel_size=1,
stride=1,
padding=0,
),
nn.Conv2D(
in_channels=features[3],
out_channels=features[3],
kernel_size=3,
stride=2,
padding=1,
),
)
self.norm = nn.Identity()
self.head = nn.Identity()
def _resize_pos_embed(self, posemb, gs_h, gs_w):
posemb_tok, posemb_grid = (
posemb[:, : self.start_index],
posemb[0, self.start_index:],
)
gs_old = int(math.sqrt(len(posemb_grid)))
posemb_grid = posemb_grid.reshape(
(1, gs_old, gs_old, -1)).transpose((0, 3, 1, 2))
posemb_grid = F.interpolate(
posemb_grid, size=(gs_h, gs_w), mode="bilinear")
posemb_grid = posemb_grid.transpose(
(0, 2, 3, 1)).reshape((1, gs_h * gs_w, -1))
posemb = paddle.concat([posemb_tok, posemb_grid], axis=1)
return posemb
def forward(self, x):
b, c, h, w = x.shape
pos_embed = self._resize_pos_embed(
self.pos_embed, h // self.patch_size, w // self.patch_size
)
x = self.patch_embed.proj(x).flatten(2).transpose((0, 2, 1))
cls_tokens = self.cls_token.expand(
(b, -1, -1)
)
x = paddle.concat((cls_tokens, x), axis=1)
x = x + pos_embed
x = self.pos_drop(x)
outputs = []
for index, blk in enumerate(self.blocks):
x = blk(x)
if index in [5, 11, 17, 23]:
outputs.append(x)
layer_1 = self.act_postprocess1[0:2](outputs[0])
layer_2 = self.act_postprocess2[0:2](outputs[1])
layer_3 = self.act_postprocess3[0:2](outputs[2])
layer_4 = self.act_postprocess4[0:2](outputs[3])
shape = (-1, 1024, h // self.patch_size, w // self.patch_size)
layer_1 = layer_1.reshape(shape)
layer_2 = layer_2.reshape(shape)
layer_3 = layer_3.reshape(shape)
layer_4 = layer_4.reshape(shape)
layer_1 = self.act_postprocess1[3: len(self.act_postprocess1)](layer_1)
layer_2 = self.act_postprocess2[3: len(self.act_postprocess2)](layer_2)
layer_3 = self.act_postprocess3[3: len(self.act_postprocess3)](layer_3)
layer_4 = self.act_postprocess4[3: len(self.act_postprocess4)](layer_4)
return layer_1, layer_2, layer_3, layer_46.2 文本编码器
- 这里采用了 CLIP 模型作为文本编码器
- 因为只需要编码文本信息,所以 CLIP 中包含的图像编码器就无需保留
In [3]
import paddle
import paddle.nn as nn
from paddlenlp.transformers.clip.modeling import TextTransformer
class CLIPText(nn.Layer):
def __init__(
self,
max_text_length: int = 77,
vocab_size: int = 49408,
text_embed_dim: int = 512,
text_heads: int = 8,
text_layers: int = 12,
text_hidden_act: str = "quick_gelu",
projection_dim: int = 512):
super().__init__()
self.text_model = TextTransformer(context_length=max_text_length,
transformer_width=text_embed_dim,
transformer_heads=text_heads,
transformer_layers=text_layers,
vocab_size=vocab_size,
activation=text_hidden_act,
normalize_before=True)
self.text_projection = paddle.create_parameter(
(text_embed_dim, projection_dim), paddle.get_default_dtype())
def get_text_features(
self,
input_ids,
attention_mask=None,
position_ids=None,
output_attentions=False,
output_hidden_states=False,
return_dict=False,
):
text_outputs = self.text_model(
input_ids=input_ids,
position_ids=position_ids,
attention_mask=attention_mask,
output_attentions=output_attentions,
output_hidden_states=output_hidden_states,
return_dict=return_dict)
pooled_output = text_outputs[1]
text_features = paddle.matmul(pooled_output, self.text_projection)
return text_features
6.3 特征融合网络
- 这是论文中提出的一个特征融合模型
In [4]
import paddle
import paddle.nn as nn
import numpy as np
class Interpolate(nn.Layer):
"""Interpolation module."""
def __init__(self, scale_factor, mode, align_corners=False):
"""Init.
Args:
scale_factor (float): scaling
mode (str): interpolation mode
"""
super(Interpolate, self).__init__()
self.interp = nn.functional.interpolate
self.scale_factor = scale_factor
self.mode = mode
self.align_corners = align_corners
def forward(self, x):
"""Forward pass.
Args:
x (tensor): input
Returns:
tensor: interpolated data
"""
x = self.interp(
x,
scale_factor=self.scale_factor,
mode=self.mode,
align_corners=self.align_corners,
)
return x
class ResidualConvUnit(nn.Layer):
"""Residual convolution module."""
def __init__(self, features):
"""Init.
Args:
features (int): number of features
"""
super().__init__()
self.conv1 = nn.Conv2D(
features, features, kernel_size=3, stride=1, padding=1
)
self.conv2 = nn.Conv2D(
features, features, kernel_size=3, stride=1, padding=1
)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
"""Forward pass.
Args:
x (tensor): input
Returns:
tensor: output
"""
out = self.relu(x)
out = self.conv1(out)
out = self.relu(out)
out = self.conv2(out)
return out + x
class FeatureFusionBlock(nn.Layer):
"""Feature fusion block."""
def __init__(self, features):
"""Init.
Args:
features (int): number of features
"""
super(FeatureFusionBlock, self).__init__()
self.resConfUnit1 = ResidualConvUnit(features)
self.resConfUnit2 = ResidualConvUnit(features)
def forward(self, *xs):
"""Forward pass.
Returns:
tensor: output
"""
output = xs[0]
if len(xs) == 2:
output += self.resConfUnit1(xs[1])
output = self.resConfUnit2(output)
output = nn.functional.interpolate(
output, scale_factor=2, mode="bilinear", align_corners=True
)
return output
class ResidualConvUnit_custom(nn.Layer):
"""Residual convolution module."""
def __init__(self, features, activation, bn):
"""Init.
Args:
features (int): number of features
"""
super().__init__()
self.bn = bn
self.groups = 1
self.conv1 = nn.Conv2D(
features,
features,
kernel_size=3,
stride=1,
padding=1,
bias_attr=not self.bn,
groups=self.groups,
)
self.conv2 = nn.Conv2D(
features,
features,
kernel_size=3,
stride=1,
padding=1,
bias_attr=not self.bn,
groups=self.groups,
)
if self.bn == True:
self.bn1 = nn.BatchNorm2D(features)
self.bn2 = nn.BatchNorm2D(features)
self.activation = activation
def forward(self, x):
"""Forward pass.
Args:
x (tensor): input
Returns:
tensor: output
"""
out = self.activation(x)
out = self.conv1(out)
if self.bn == True:
out = self.bn1(out)
out = self.activation(out)
out = self.conv2(out)
if self.bn == True:
out = self.bn2(out)
if self.groups > 1:
out = self.conv_merge(out)
return out + x
class FeatureFusionBlock_custom(nn.Layer):
"""Feature fusion block."""
def __init__(
self,
features,
activation=nn.ReLU(),
deconv=False,
bn=False,
expand=False,
align_corners=True,
):
"""Init.
Args:
features (int): number of features
"""
super(FeatureFusionBlock_custom, self).__init__()
self.deconv = deconv
self.align_corners = align_corners
self.groups = 1
self.expand = expand
out_features = features
if self.expand == True:
out_features = features // 2
self.out_conv = nn.Conv2D(
features,
out_features,
kernel_size=1,
stride=1,
padding=0,
bias_attr=True,
groups=1,
)
self.resConfUnit1 = ResidualConvUnit_custom(features, activation, bn)
self.resConfUnit2 = ResidualConvUnit_custom(features, activation, bn)
def forward(self, *xs):
"""Forward pass.
Returns:
tensor: output
"""
output = xs[0]
if len(xs) == 2:
res = self.resConfUnit1(xs[1])
output += res
output = self.resConfUnit2(output)
output = nn.functional.interpolate(
output, scale_factor=2, mode="bilinear", align_corners=self.align_corners
)
output = self.out_conv(output)
return output
class Scratch(nn.Layer):
def __init__(self, in_channels=[256, 512, 1024, 1024], out_channels=256):
super().__init__()
self.out_c = 512
self.logit_scale = paddle.to_tensor(np.exp(np.log([1 / 0.07])))
self.layer1_rn = nn.Conv2D(
in_channels[0],
out_channels,
kernel_size=3,
stride=1,
padding=1,
bias_attr=False,
groups=1,
)
self.layer2_rn = nn.Conv2D(
in_channels[1],
out_channels,
kernel_size=3,
stride=1,
padding=1,
bias_attr=False,
groups=1,
)
self.layer3_rn = nn.Conv2D(
in_channels[2],
out_channels,
kernel_size=3,
stride=1,
padding=1,
bias_attr=False,
groups=1,
)
self.layer4_rn = nn.Conv2D(
in_channels[3],
out_channels,
kernel_size=3,
stride=1,
padding=1,
bias_attr=False,
groups=1,
)
self.refinenet1 = FeatureFusionBlock_custom(
out_channels, bn=True
)
self.refinenet2 = FeatureFusionBlock_custom(
out_channels, bn=True
)
self.refinenet3 = FeatureFusionBlock_custom(
out_channels, bn=True
)
self.refinenet4 = FeatureFusionBlock_custom(
out_channels, bn=True
)
self.head1 = nn.Conv2D(out_channels, self.out_c, kernel_size=1)
self.output_conv = nn.Sequential(
Interpolate(scale_factor=2, mode="bilinear", align_corners=True)
)
def forward(self, layer_1, layer_2, layer_3, layer_4, text_features):
layer_1_rn = self.layer1_rn(layer_1)
layer_2_rn = self.layer2_rn(layer_2)
layer_3_rn = self.layer3_rn(layer_3)
layer_4_rn = self.layer4_rn(layer_4)
path_4 = self.refinenet4(layer_4_rn)
path_3 = self.refinenet3(path_4, layer_3_rn)
path_2 = self.refinenet2(path_3, layer_2_rn)
path_1 = self.refinenet1(path_2, layer_1_rn)
image_features = self.head1(path_1)
imshape = image_features.shape
image_features = image_features.transpose(
(0, 2, 3, 1)).reshape((-1, self.out_c))
# normalized features
image_features = image_features / \
image_features.norm(axis=-1, keepdim=True)
text_features = text_features / \
text_features.norm(axis=-1, keepdim=True)
logits_per_image = self.logit_scale * image_features @ text_features.t()
out = logits_per_image.reshape(
(imshape[0], imshape[2], imshape[3], -1)).transpose((0, 3, 1, 2))
out = self.output_conv(out)
return out6.4 语义分割模型
- 将上述的三个模块拼起来,就组成了一个文本驱动的语义分割模型
In [5]
class LSeg(nn.Layer):
def __init__(self):
super().__init__()
self.clip = CLIPText()
self.vit = ViT()
self.scratch = Scratch()
def forward(self, images, texts):
layer_1, layer_2, layer_3, layer_4 = self.vit.forward(images)
text_features = self.clip.get_text_features(texts)
return self.scratch.forward(layer_1, layer_2, layer_3, layer_4, text_features)7. 模型推理
7.1 可视化工具
In [ ]
import matplotlib.pyplot as plt
import matplotlib.patches as mpatches
def get_new_pallete(num_cls):
n = num_cls
pallete = [0]*(n*3)
for j in range(0,n):
lab = j
pallete[j*3+0] = 0
pallete[j*3+1] = 0
pallete[j*3+2] = 0
i = 0
while (lab > 0):
pallete[j*3+0] |= (((lab >> 0) & 1) << (7-i))
pallete[j*3+1] |= (((lab >> 1) & 1) << (7-i))
pallete[j*3+2] |= (((lab >> 2) & 1) << (7-i))
i = i + 1
lab >>= 3
return pallete
def get_new_mask_pallete(npimg, new_palette, out_label_flag=False, labels=None):
"""Get image color pallete for visualizing masks"""
# put colormap
out_img = Image.fromarray(npimg.squeeze().astype('uint8'))
out_img.putpalette(new_palette)
if out_label_flag:
assert labels is not None
u_index = np.unique(npimg)
patches = []
for i, index in enumerate(u_index):
label = labels[index]
cur_color = [new_palette[index * 3] / 255.0, new_palette[index * 3 + 1] / 255.0, new_palette[index * 3 + 2] / 255.0]
red_patch = mpatches.Patch(color=cur_color, label=label)
patches.append(red_patch)
return out_img, patches7.2 加载模型
In [ ]
import paddle.vision.transforms as transforms
from paddlenlp.transformers.clip.tokenizer import CLIPTokenizer
model = LSeg()
state_dict = paddle.load('data/data169501/LSeg.pdparams')
model.set_state_dict(state_dict)
model.eval()
transform = transforms.Compose(
[
transforms.ToTensor(),
transforms.Normalize(
[0.5, 0.5, 0.5],
[0.5, 0.5, 0.5]
),
]
)
tokenizer = CLIPTokenizer.from_pretrained('openai/clip-vit-base-patch32')7.3 模型预测
In [8]
import cv2
import numpy as np
from PIL import Image
# 指定图像路径
img_path = 'images/cat.jpeg'
# 指定类别标签
labels = ['plant', 'grass', 'cat', 'stone', 'other']
image = cv2.imread(img_path)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
h, w = image.shape[:2]
image = image[:-(h%32) if h%32 else None, :-(w%32) if w%32 else None]
images = transform(image).unsqueeze(0)
image = Image.fromarray(image).convert("RGBA")
texts = tokenizer(labels, padding=True, return_tensors="pd")['input_ids']
with paddle.no_grad():
results = model.forward(images, texts)
results = paddle.argmax(results, 1)
results = results.numpy()
new_palette = get_new_pallete(len(labels))
mask, patches = get_new_mask_pallete(results, new_palette, out_label_flag=True, labels=labels)
seg = mask.convert("RGBA")
out = Image.blend(image, seg, alpha=0.5)
plt.axis('off')
plt.imshow(image)
plt.figure()
plt.axis('off')
plt.imshow(out)
plt.figure()
plt.legend(handles=patches, loc='upper right', bbox_to_anchor=(1.5, 1), prop={'size': 20})
plt.axis('off')
plt.imshow(seg)<matplotlib.image.AxesImage at 0x7ff189365f10>

<Figure size 640x480 with 1 Axes>

<Figure size 640x480 with 1 Axes>

<Figure size 640x480 with 1 Axes>