目录
1、简介
STM32F103C8T6单片机(HAL库方式)通过UN2003芯片对步进电机进行正反转控制。
2、Cubemax配置
2.1 RCC配置

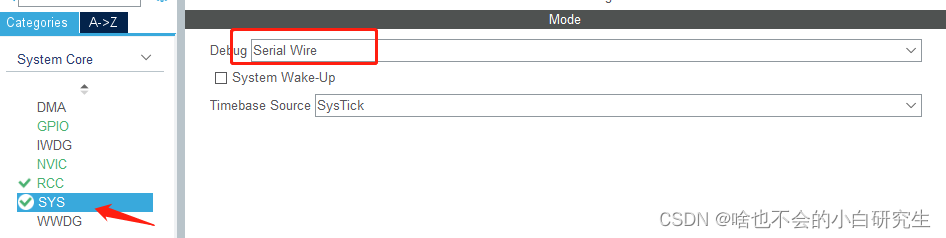
2.2 SYS配置
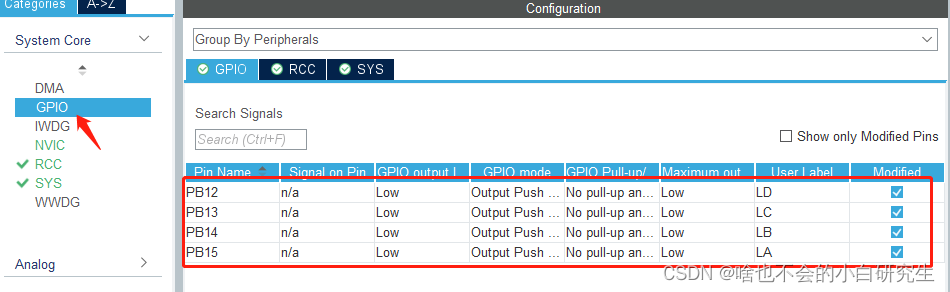
2.3 GPIO配置
2.4 生成文件


3、硬件连接
IN1---PB15
IN2---PB14
IN3---PB13
IN4----PB12
+5V---5V
GND---GND
4、keil端代码整合
4.1 宏定义

#define LD_ON HAL_GPIO_WritePin(LD_GPIO_Port, LD_Pin, GPIO_PIN_SET)
#define LD_OFF HAL_GPIO_WritePin(LD_GPIO_Port, LD_Pin, GPIO_PIN_RESET)
#define LC_ON HAL_GPIO_WritePin(LC_GPIO_Port, LC_Pin, GPIO_PIN_SET)
#define LC_OFF HAL_GPIO_WritePin(LC_GPIO_Port, LC_Pin, GPIO_PIN_RESET)
#define LB_ON HAL_GPIO_WritePin(LB_GPIO_Port, LB_Pin, GPIO_PIN_SET)
#define LB_OFF HAL_GPIO_WritePin(LB_GPIO_Port, LB_Pin, GPIO_PIN_RESET)
#define LA_ON HAL_GPIO_WritePin(LA_GPIO_Port, LA_Pin, GPIO_PIN_SET)
#define LA_OFF HAL_GPIO_WritePin(LA_GPIO_Port, LA_Pin, GPIO_PIN_RESET)
4.2 添加fun.c func.h
func.h
#ifndef FUNC_FUNC_H_
#define FUNC_FUNC_H_
#include "main.h"
#define time 24000
void anticlockwise(void);
void clockwise(void);
#endif /* FUNC_FUNC_H_ */
func.c
#include "func.h"
uint32_t free_time_delay;
void anticlockwise()
{
//D4-LD
//D5-LC
//D6-LB
//D7-LA
LD_ON;
//1
free_time_delay = time; while(--free_time_delay>0);
LC_ON;
//2
free_time_delay = time; while(--free_time_delay>0);
LD_OFF;
//3
free_time_delay = time; while(--free_time_delay>0);
LB_ON;
//4
free_time_delay = time; while(--free_time_delay>0);
LC_OFF;
//5
free_time_delay = time; while(--free_time_delay>0);
LA_ON;;
//6
free_time_delay = time; while(--free_time_delay>0);
LB_OFF;
//7
free_time_delay = time; while(--free_time_delay>0);
LD_ON;
//8
free_time_delay = time; while(--free_time_delay>0);
LA_OFF;
}
void clockwise()
{
LA_ON;
//1
free_time_delay = time; while(--free_time_delay>0);
LB_ON;
//2
free_time_delay = time; while(--free_time_delay>0);
LA_OFF;
//3
free_time_delay = time; while(--free_time_delay>0);
LC_ON;
//4
free_time_delay = time; while(--free_time_delay>0);
LB_OFF;
//5
free_time_delay = time; while(--free_time_delay>0);
LD_ON;;
//6
free_time_delay = time; while(--free_time_delay>0);
LC_OFF;
//7
free_time_delay = time; while(--free_time_delay>0);
LA_ON;
//8
free_time_delay = time; while(--free_time_delay>0);
LD_OFF;
}
main.c
while (1)
{
clockwise();//正
HAL_Delay(5000);
anticlockwise();//反
HAL_Delay(5000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */