目录
1.算法仿真效果
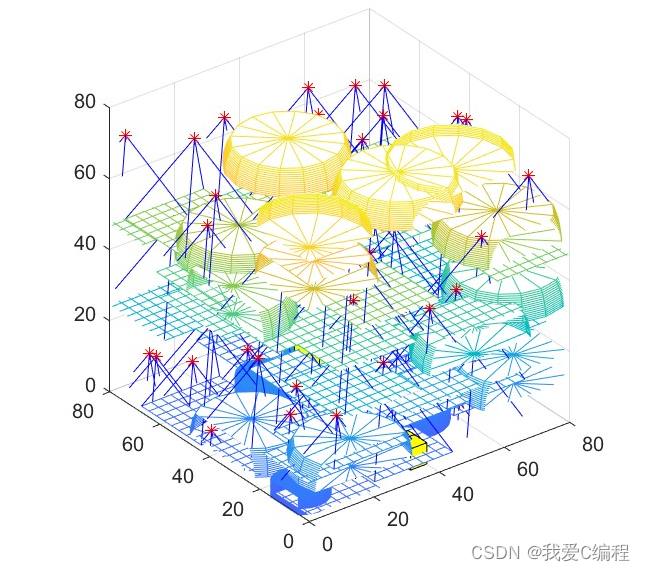
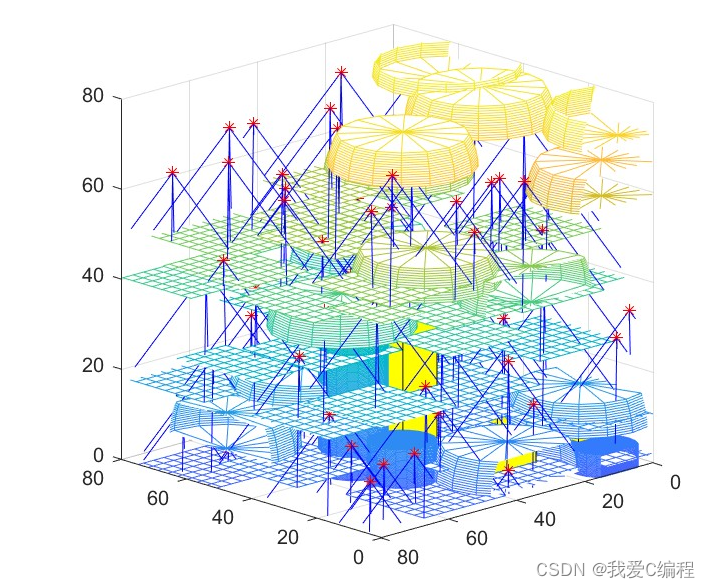
matlab2022a仿真结果如下:



2.算法涉及理论知识概要
随着智能家居和自动化建筑的不断发展,红外传感器在室内环境监测、安防、智能控制等领域中得到了广泛应用。在室内部署红外传感器时,其位置的选择对于传感器的性能和信号质量有着至关重要的影响。因此,如何确定红外传感器的最佳部署位置成为了一个热门的研究课题。
一、研究背景
红外传感器是一种广泛应用于室内环境监测、安防、智能控制等领域的传感器。在实际应用中,红外传感器的位置选择对于传感器的性能和信号质量有着至关重要的影响。因此,如何确定红外传感器的最佳部署位置成为了一个热门的研究课题。
传统的红外传感器部署方法主要是基于经验和试错的方式进行的。这种方法存在着许多问题,如需要大量的时间和人力成本、无法保证部署的最优性、无法考虑到不同环境、不同传感器的影响等。因此,如何利用现代优化算法对红外传感器的部署位置进行优化是当前研究的热点之一。
二、GA遗传优化算法
GA遗传优化算法是一种基于生物进化原理的优化算法。它通过模拟自然界的进化过程,从解空间中搜索最优解。其基本思想是将待优化问题的解表示为一组遗传码,然后通过遗传操作(选择、交叉、变异)对遗传码进行操作,从而不断地进化出更优秀的解。
GA遗传优化算法包括以下几个步骤:
初始化种群:随机生成一组初始种群,每个个体对应一个问题的解。
适应度函数:对于每个个体,计算其适应度值。适应度值越大,代表该个体越优秀。
选择操作:根据适应度值,选择优秀的个体作为父代,进一步繁殖下一代个体。
交叉操作:将父代个体的基因组合起来,生成新的个体。
变异操作:对新的个体进行随机变异,引入一定的随机性,避免陷入局部最优。
终止条件:达到预定的终止条件后,输出最优解。
三、基于GA优化的三维室内红外传感器部署策略
为了解决红外传感器部署的优化问题,本文提出了一种基于GA遗传优化算法的三维室内红外传感器部署策略。该策略的主要流程如下:
建立室内三维模型:首先,需要建立室内的三维模型,包括房间的大小、布局、墙壁、家具等信息。可以使用三维建模软件进行建模,也可以使用3D扫描仪进行实时扫描。
确定传感器数量和类型:根据实际需求,确定需要部署的红外传感器数量和类型。
初始化种群:将室内空间划分为若干个区域,并随机生成一组初始种群,每个个体对应一个传感器的部署方案,即每个个体表示了所有传感器的位置和朝向。
适应度函数:对于每个个体,计算其适应度值。适应度值的计算需要考虑到以下几个方面:
覆盖率:传感器部署方案需要覆盖室内空间的尽可能多的区域,以保证传感器能够检测到所有的目标。
重叠度:传感器部署方案需要避免传感器之间的重叠,以避免重复检测。
捕获率:传感器部署方案需要尽可能地提高目标的捕获率,即检测到目标的概率。
选择操作:根据适应度值,选择优秀的个体作为父代,进一步繁殖下一代个体。本文采用了轮盘赌选择算法进行选择操作。
交叉操作:将父代个体的基因组合起来,生成新的个体。本文采用了单点交叉算法进行交叉操作。
变异操作:对新的个体进行随机变异,引入一定的随机性,避免陷入局部最优。本文采用了随机变异算法进行变异操作。
终止条件:达到预定的终止条件后,输出最优解。本文采用了迭代次数作为终止条件。
3.MATLAB核心程序
..........................................................................
%优化变量得到的三维坐标值
X1 = XYZ1(1,:);
Y1 = XYZ1(2,:);
Z1 = XYZ1(3,:);
%避开障碍物
Idx1 = [];
for i=1:Nr1
for j = 1:length(X1)
%判断传感器的坐标点区域和传感器是否有交集,有交集那么说明碰到障碍物了,则去除这些错误的部署点
if abs(X1(j)-(X3(i)+L(i)/2))<=L(i)/2 & abs(Y1(j)-(Y3(i)+W(i)/2))<=W(i)/2 & abs(Z1(j)-(Z3(i)+H(i)/2))<=H(i)/2
Idx1 = [Idx1,j];
end
end
end
idx2 = unique(Idx1);
X1(idx2) = [];
Y1(idx2) = [];
Z1(idx2) = [];
NUM1_new = NUM1-length(find(idx2<=NUM1));
NUM2_new = length(X1)-NUM1_new;
Idx1 = [];
for i=1:Nr2
for j = 1:length(X1)
%判断传感器的坐标点区域和传感器是否有交集,有交集那么说明碰到障碍物了,则去除这些错误的部署点
if ((X1(j) - X4(i))^2 + (Y1(j) - Y4(i))^2 + (Z1(j) - Z4(i))^2) <= R4(i)^2
Idx1 = [Idx1,j];
end
end
end
idx2 = unique(Idx1);
X1(idx2) = [];
Y1(idx2) = [];
Z1(idx2) = [];
NUM1_new = NUM1-length(find(idx2<=NUM1));
NUM2_new = length(X1)-NUM1_new;
%上面两个步骤,去掉了和障碍物有重叠的部署位置
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%第一个,覆盖率
Sar=0;
for i = 1:SCALE
for j = 1:SCALE
for kk = 1:SCALE
Nums = 0;
for k = 1:(NUM1_new+NUM2_new)
if k<=NUM1_new%类似半个无顶的球体覆盖率计算,那么Z轴的取值范围,这里只考虑90旋转或者180旋转,任意角度情况不考虑,否则非常复杂
if ((X1(k) - i)^2 + (Y1(k) - j)^2 + (Z1(k) - kk)^2) < Rad1^2 & (abs(Z1(k)-kk)<=Rad1*sin(Dgree))%30度的弧形
Nums=Nums+1;
end
end
if k>NUM1_new & k<=(NUM1_new+NUM2_new)%正方形覆盖率计算
if abs(X1(k) - i)<=Rad2 & abs(Y1(k) - j)<=Rad2 & abs(Z1(k) - kk)<=Rad2
Nums=Nums+1;
end
end
end
if Nums > 0
Sar=Sar+1;
end
end
end
end
fobj1 = 1-Sar/SCALE/SCALE/SCALE;%整体减去被覆盖到的点,就是非覆盖率,因为优化算法是往最小值找的,所以需要减去覆盖率,得到非覆盖率,越小越好
%第二个安装难度,这里做一个定义,和障碍物越近,那么难度越大因为涉及到信号的传输和障碍物的避让问题
fobj2_= [];
for i=1:(NUM1_new+NUM2_new)
if i<=NUM1_new
d1=[];
d2=[];
for j=1:Nr1
tmps = sqrt((X1(i) - X3(j))^2 + (Y1(i) - Y3(j))^2)+ (Z1(i) - Z3(j))^2; %计算距离
if tmps < Rad1%满足条件的则保持到d1数据库
d1=[d1,1/(tmps+1)];
end
end
for j=1:Nr2
tmps = sqrt((X1(i) - X4(j))^2 + (Y1(i) - Y4(j))^2 + (Z1(i) - Z4(j))^2); %计算距离
if tmps < Rad1%满足条件的则保持到d2数据库
d2=[d2,1/(tmps+1)];
end
end
if isempty([d1,d2])==1
fobj2_(i)=0;
else
fobj2_(i)=mean([d1,d2]);
end
end
if i>NUM1_new
d1=[];
d2=[];
for j=1:Nr1
tmps = sqrt((X1(i) - X3(j))^2 + (Y1(i) - Y3(j))^2 + (Z1(i) - Z3(j))^2); %计算距离
if tmps < Rad2%满足条件的则保持到d1数据库
d1=[d1,1/(tmps+1)];
end
end
for j=1:Nr2
tmps = sqrt((X1(i) - X4(j))^2 + (Y1(i) - Y4(j))^2 + (Z1(i) - Z4(j))^2); %计算距离
if tmps < Rad2%满足条件的则保持到d2数据库
d2=[d2,1/(tmps+1)];
end
end
if isempty([d1,d2])==1
fobj2_(i)=0;
else
fobj2_(i)=mean([d1,d2]);
end
end
end
...........................................................................
f1=Sar/SCALE/SCALE/SCALE;
f2=mean(fobj2_);
f3=(NUM1_new+NUM2_new)/(N1+N2);%最优传感器数量
fitness = 0.6*fobj1 + 0.1*fobj2+0.3*f3;%获得最终的加权值
09_057_m4.完整算法代码文件
V