大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。随着知识的越来越多,越来越细,我准备整理一个自己的激光SLAM学习笔记专栏,从0带大家快速上手激光SLAM,也方便想入门SLAM的同学和小白学习参考,相信看完会有一定的收获。如有不对的地方欢迎指出,欢迎各位大佬交流讨论,一起进步。
在学习SLAM算法之前需要知道点云数据的类型和基本特性,在后续看代码论文时候,会发现很多基本思想和操作都来源点云的基本处理,清楚这些我们才明白每一步是做什么的,下来我们来一起学习一下。
目录
2.1 维度缩减 将点云投影到二维,从而使得点云被更好的分类。
1.点云数据介绍
点云是一个数据集,数据集中的每个点代表一组X、Y、Z几何坐标和一个强度值,这个强度值根据物体表面反射率记录返回信号的强度。当这些点组合在一起时,就会形成一个点云,即空间中代表3D形状或对象的数据点集合。主要特征如下:
Ø 密度不均匀(稀疏性)
Ø 不规则
Ø 没有纹理信息(三人成车)
Ø 对深度学习的特点:无序性,旋转不变性
2. 点云主成分分析
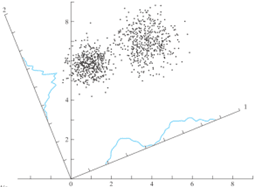
Principle Component Analysis主成分分析,PCA是寻找点云的主要方向,可以利用主成分分析,对点云进行如下操作:
2.1 维度缩减 将点云投影到二维,从而使得点云被更好的分类。
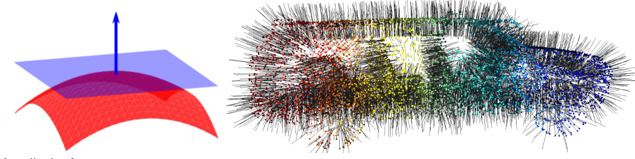
2.2 表面法向量估计
点云拟合曲面的切面的法向量,只有定义邻域才有法向量,邻域大相对平滑受个别点的影响小,邻域大比较灵敏但容易受影响。法向量是最没用的向量,所有点投影到这个向量上的值加起来最小,反应最少的特征。法向量估计可以应用到点云分割、聚类、平面点检测、作为点云的一个特征。

3. 点云滤波
对点云的密度进行处理
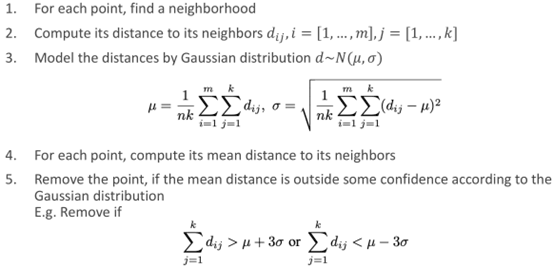
3.1 噪点去除
去除点云中的离散点
-
Radius Outlier Removal

-
Statistical Outlier Removal
3.2 下采样
对点云的密度进行降低,保证点云的整体特征不变
-
Voxel Grid Downsampling
核心思想,将点用体素内少量的中心点代替表示。
两种选点方式:1. 一个格子中计算平均点 2. 一个格子中随机选一个点


-
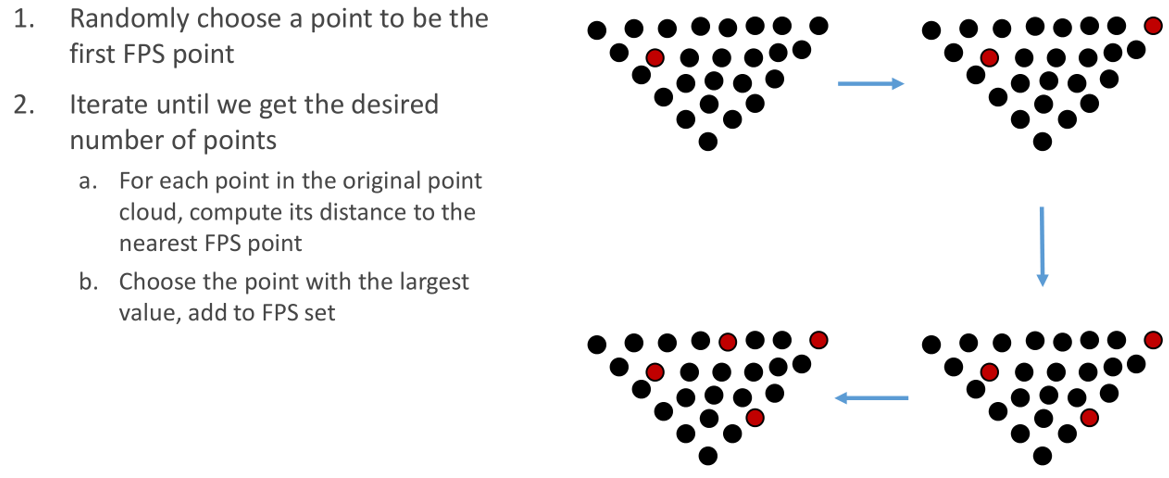
Farthest Point Sampling
核心思想:挑一个点距离最远的点
-
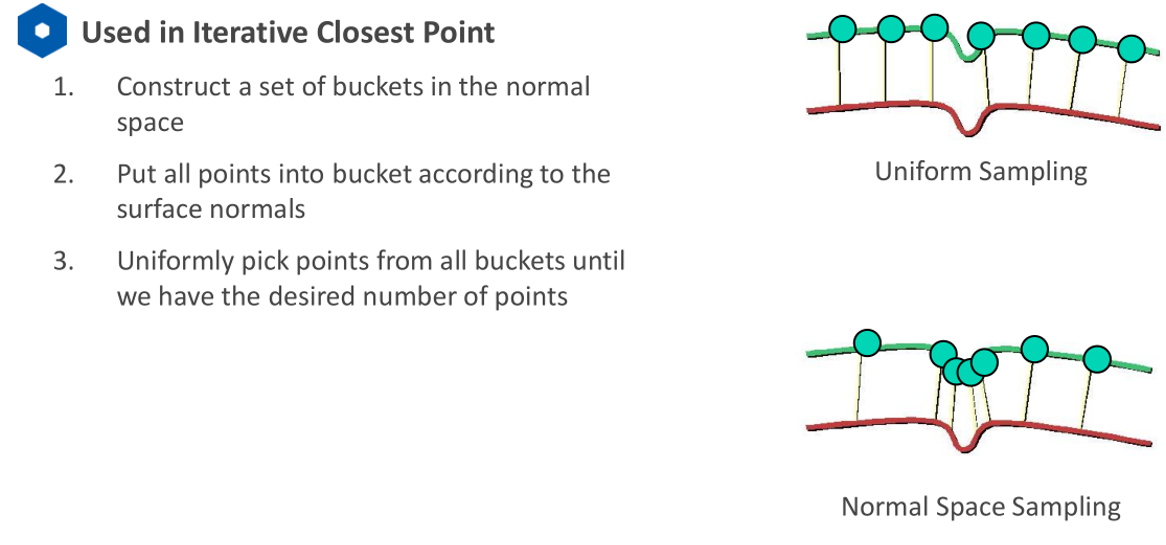
Normal Space Sampling
核心思想:保留特征突变的点,不会漏掉特征。适用于点云对齐
-
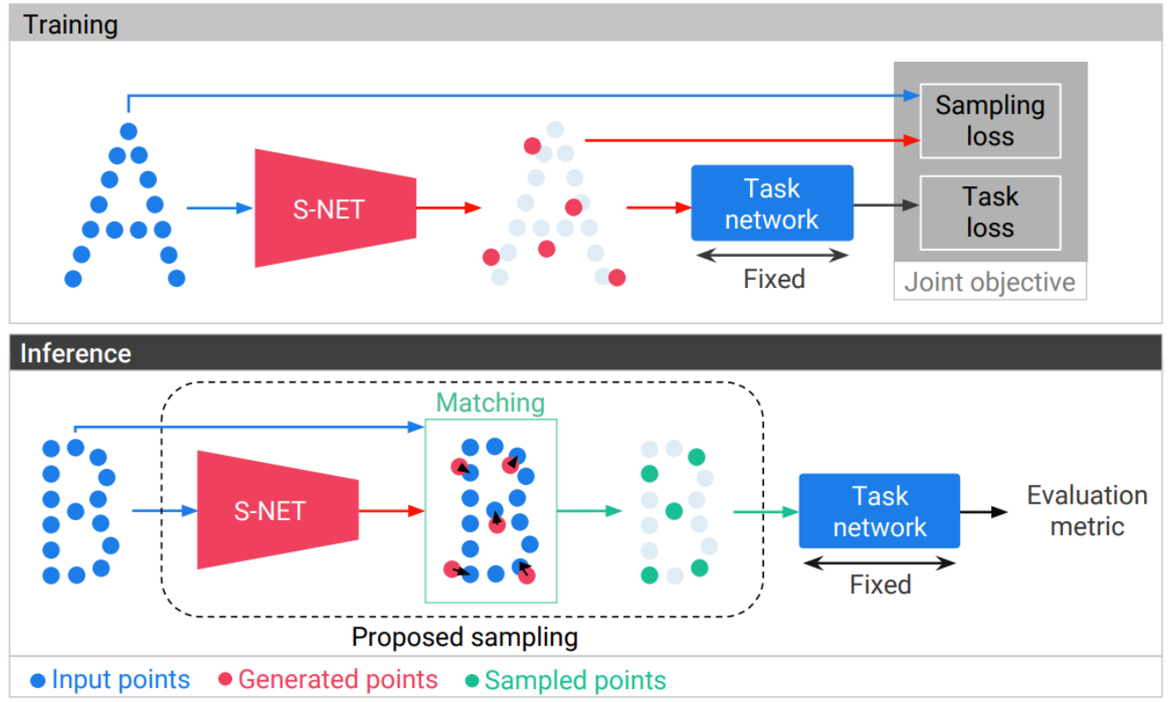
Learning to Sampling
核心思想:传统方法通过几何关系找到降采样点,S-NET是根据语义关系,即经过降采样之后的点云输入网络还是能够得到同样的标签。设定几何约束,来使降采样的点与原来的点云距离相似。
3.3 上采样
点云上采样是将低密度的点云转换为高密度的点云的一种操作。与点云下采样相对应,点云上采样的目的是在保留原始点云几何形状的同时,增加点云的分辨率和细节信息。
点云上采样通常有两种方法:
-
基于重构的方法:这种方法通过对点云进行重构(如曲面重构、体素网格化等),生成更密集的点云。
-
基于插值的方法:这种方法通过对原始点云中的点进行插值(如最近邻插值、高斯过程插值等),生成新的点,从而增加点云的密度。
点云上采样的应用场景包括但不限于:医学图像处理、机器人视觉、三维重建等领域。
4. 点云最邻近问题
在SLAM中常会遇见点云的特征点匹配这类问题,如何寻找最邻近点成为了主要问题。
点云最邻近问题难点:1. 不规则 2. 三维 3. 数据量大
最邻近问题算法一般流程: 1. 分隔空间 2. 搜索空间 3. 停止搜索
算法主要分为点云储存和搜寻两个主要算法
4.1 点云搜索
4.2 点云存储
-
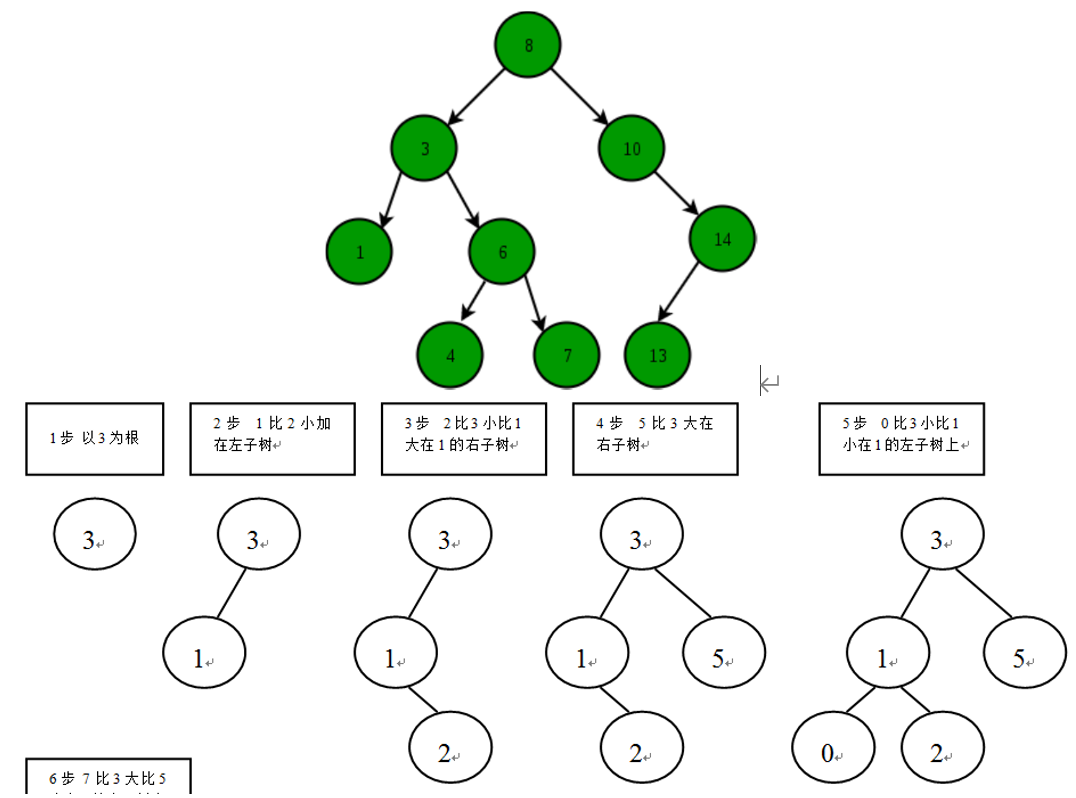
Binary Search Tree 二叉树
(适用于一维数据)
一棵二叉树是结点的一个有限集合,该集合或者为空,或者是由一个根节点加上两棵别称为左子树和右子树的二叉树组成。二叉排序树(BST),任何一个非叶子结点的值,要大于其左子结点的值,小于其右子结点的值。二叉树的特点:
1、每个节点最多有两棵子树,即不存在超过度为2的节点。
2、二叉树的子树有左右之分,且左右不能颠倒。
-
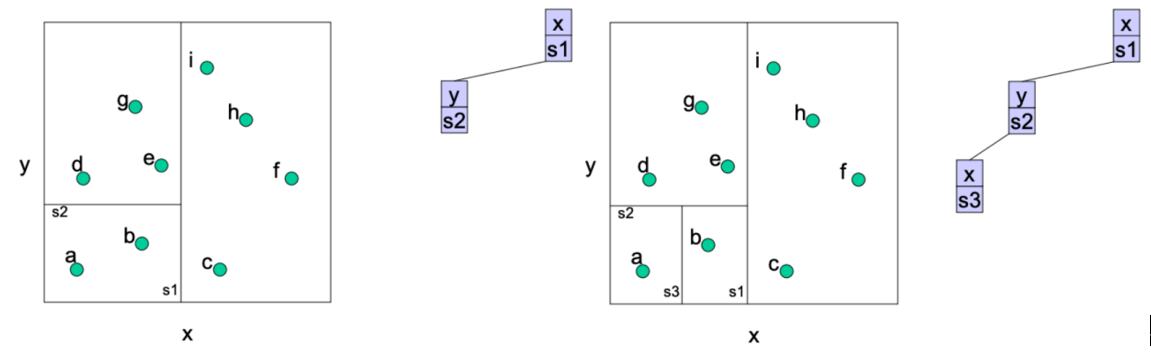
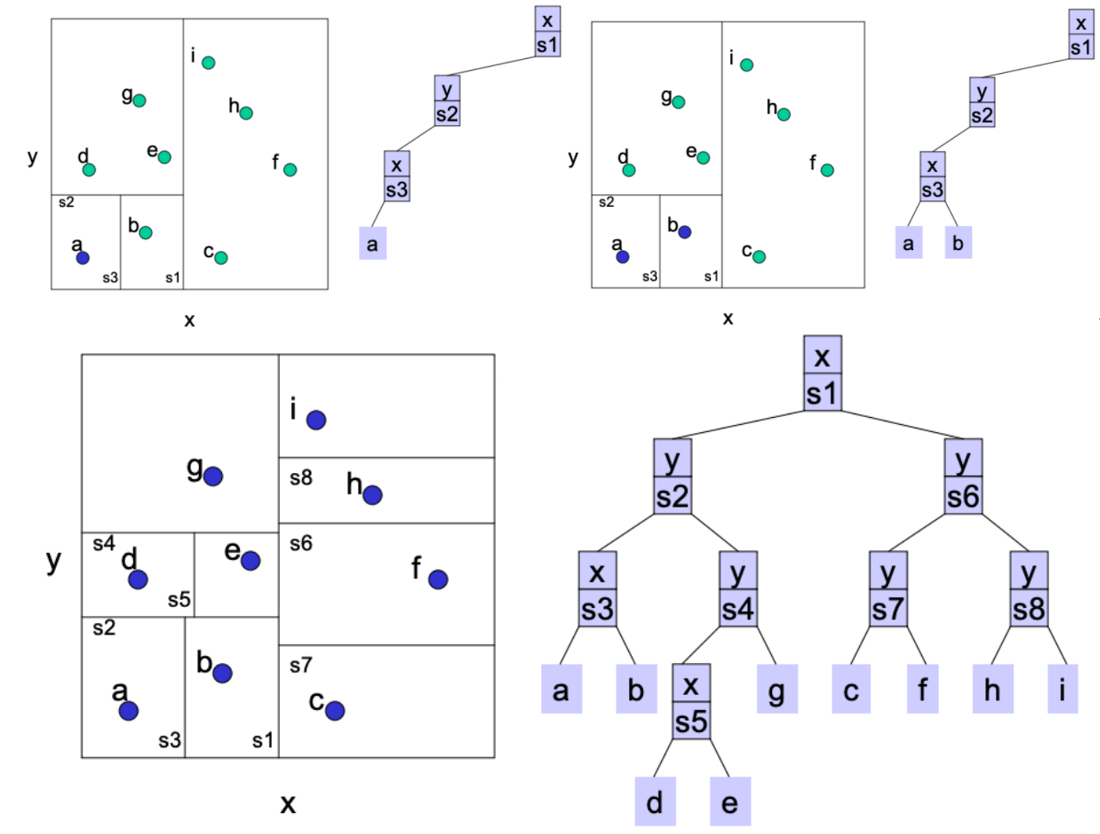
kd-tree
在每个维度应用一下二叉树就是KD树,先随意找一个方向切

按维度轮流切,切到leaf_size=1,即区域中只有一个点。每一层需要排序找中间点进行切割。
-
Oc-tree
专门为三维搜索建立的数据结构,与KD树的区别是一次运用多维度信息进行切割。

KD-tree和Octree都是常用的点云匹配中的搜索数据结构,但在实际应用中,KD-tree通常比Octree更为常用,原因如下:
-
KD-tree的查询速度通常比Octree快,尤其是在高维数据(如3D点云)下,KD-tree的性能更优。这是因为KD-tree中每个节点只需要存储一个划分维度和两个子节点,而Octree中需要存储更多的信息,因此Octree需要更多的存储空间和计算量。
-
KD-tree的建立速度通常比Octree快,尤其是在数据维度较高时,Octree需要更多的时间来构建树状结构。
-
在一些点云匹配的应用中,KD-tree能够提供更好的匹配效果。例如,在最近邻搜索中,KD-tree能够更好地处理密集分布的点云,因为KD-tree在空间中按照一定的规则对点云进行了划分,能够有效地减少搜索空间。而Octree在处理密集点云时可能会出现效率不高的情况,因为Octree需要在每个叶节点上都进行搜索。
虽然KD-tree比Octree在点云匹配中更为常用,但在某些特定的场景下,Octree也可能更适用,例如在处理稀疏分布的点云时。因此,在实际应用中需要根据具体场景选择合适的搜索数据结构。
- iKD-Tree
Ø KdTree的问题
随着节点的“插入”和“删除”,KdTree也得改变,因为KdTree是由无数个节点组成的。在SLAM中,更关心的是KdTree如何删除,KdTree不断地插入新的节点,删除过旧的节点,那么在这个过程中,会导致kdTree结构被破坏(一个完整的结构,其中一部分被删除了,结构肯定被破坏了,而且“树”的平衡性也会被破坏)所谓 “平衡性”,就是“树”的左右两侧,节点数差大于阈值,删除一个中间节点意味着该节点下方的所有节点都要重构新的subtree,因此删除是一个很低效的操作,当KdTree的结构被破坏的时候,搜索效率大幅度下降。针对KdTree,大量的时间并不是花在“搜索”上,而是消耗在“树的构建”,因为每次“删除节点”,都需要重新构建“树”,非常的耗时;
Ø “树”结构完整性
针对Kd-Tree的“结构被破坏,不得不重建”的问题,iKdTree设计了“增量式动态Kd-Tree0”算法,可以实现较好的“搜索/插入/删除”操作,而且不会破坏系统的“平衡性”;
在传统的Kd-Tree中,删除一个中间节点意味着该节点下方的所有节点都要重构新的subtree,因此删除是一个很低效的操作。
但是,在增量式iKd-Tree中,要删除一个节点,先是将这个“要删除”的节点标记为删除,被标记为删除的节点在“KNN近邻搜索”的时候会被 “跳过”,“树”的结构还是存在的,只有当iKd-Tree结构被“彻底重构”的时候,才会借机将这些节点从“tree结构”中删除。
Ø “树”结构平衡性
所谓的平衡性,就是“树”的左右两侧,当发生节点删除后,某一侧可能会大量的点被删除,因为删除某个节点,该节点的子节点可能也要被删除。
(1)方案一:当“树”的结构较小的时候,即使重构,也不会特别麻烦,时间可以忽略不计,直接将节点全部打散,删除“已经被标记的节点”,对剩下的节点执行传统“Kd-Tree”创建的操作;
(2)方案二:当“树”的结构很大的时候,就不能忽略重构的耗时,如果在主线程进行重构,那么就会导致iKd-Tree一直被占用,LIO/VIO系统不能访问“树”的查询与删除,算法阻塞;
因此,在方案二中,iKd-Tree设计了 “并行线程”的方案,即在开一个额外的线程,主线程已经对“树”进行删除、增减操作,如果要删除的节点正在“被另一个线程重构”,则将此节点缓存到OperationLogger的容器中;等到“额外的线程完成了重构”,再从OperationLogger的容器中拿出对应的节点来“补上”,从而保证每个节点都不会被落下。
5. 点云聚类
(代码lidar_slam_course/ch2/point_cluster)
把相似的放在一起
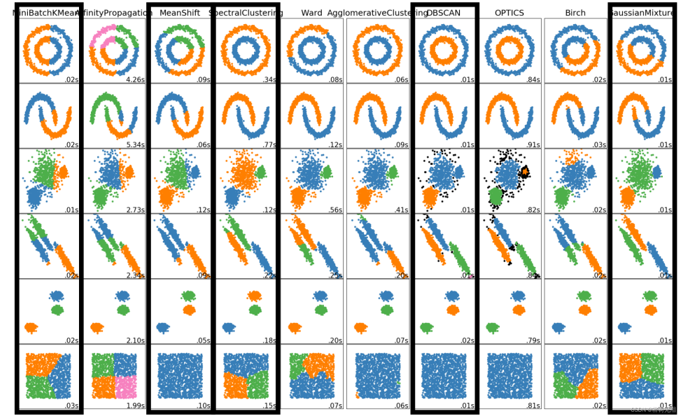
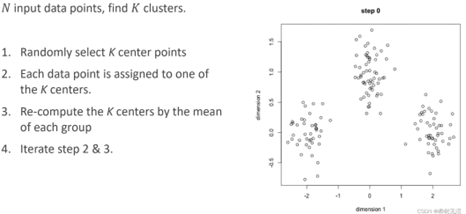
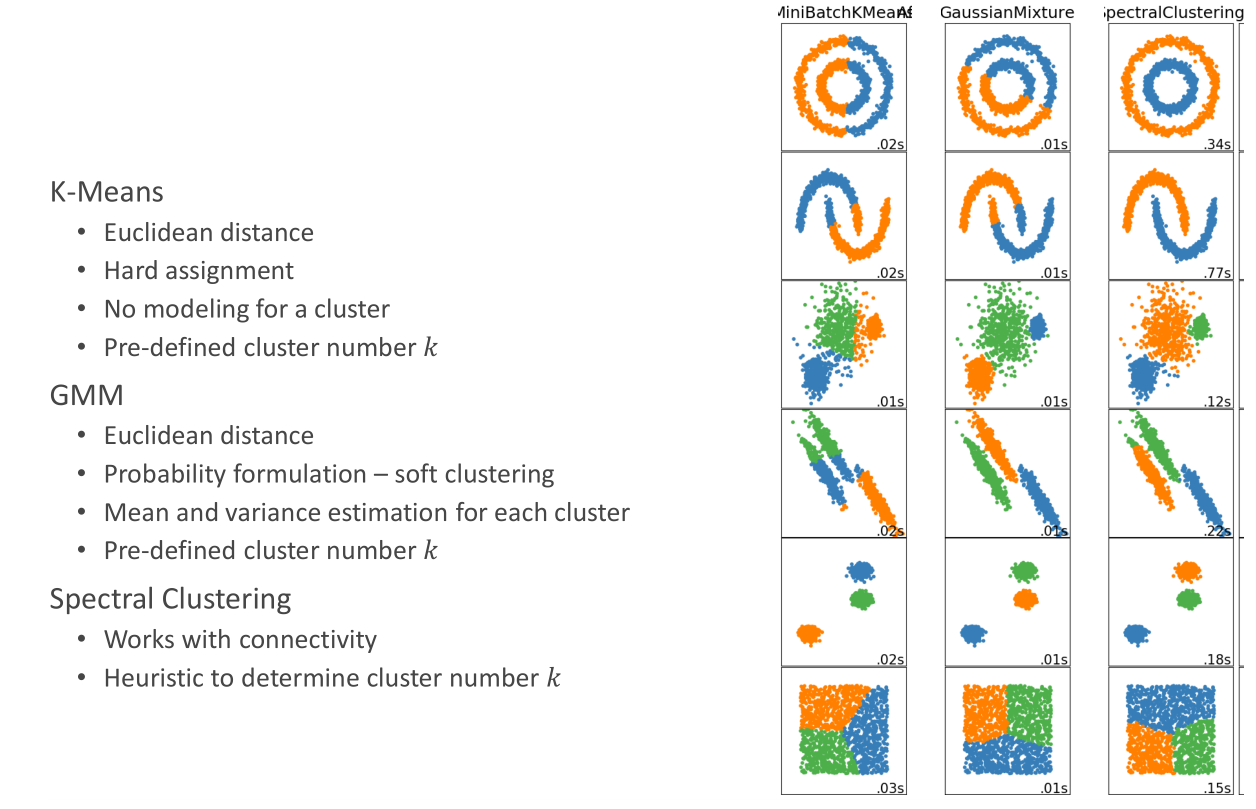
5.1 K-Means算法
1、人工给定K个类 2、每个点是哪一个类 3、更新中心点的位置 4、迭代直到算法收敛
算法收敛的条件: 1、中心点不再移动 2、所有点分配点不再变化
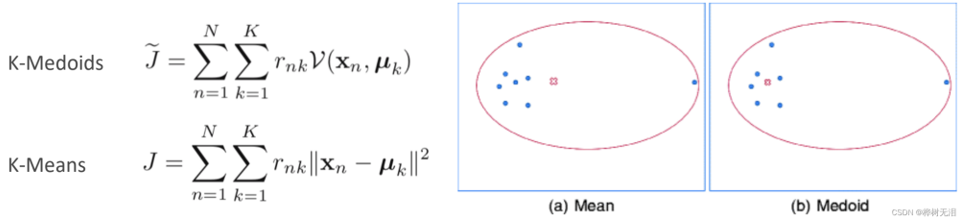
5.2 K-Medoids
K-means对于有噪声存在的点效果不好。K-Medoids不再选平均值,而是选择一个点使得所有点的距离和最小。
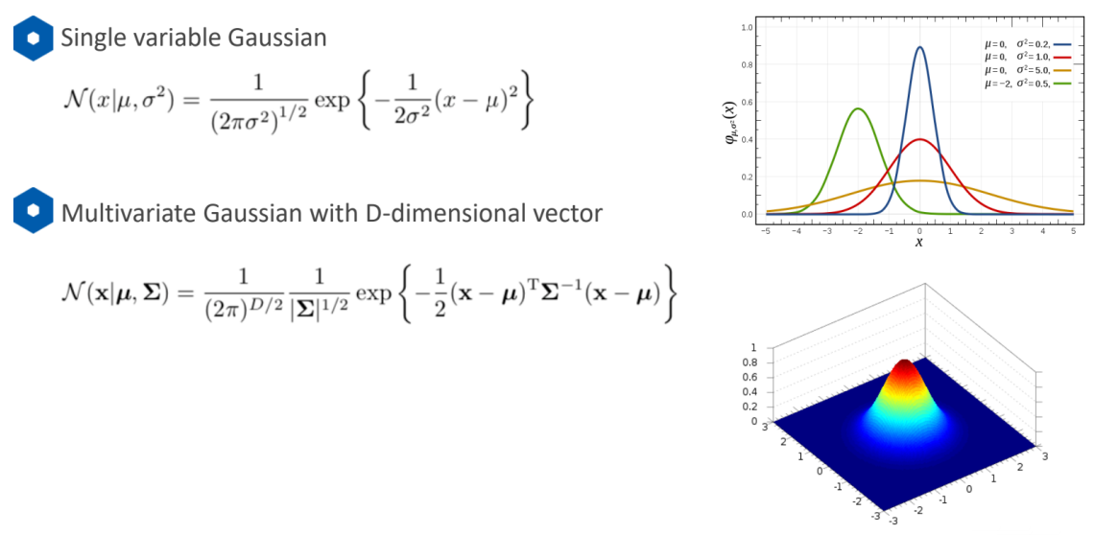
 5.3 高斯GMM模型
5.3 高斯GMM模型
用高斯模型来描绘每个类的,给出每个点是该类的概率n个高斯模型的线性组合
5.4 Spectral Clustering 谱聚类
之前的点是在欧式空间中聚类的,所以对于不规则的分布效果不好。谱聚类是根据点与点之间的连接性。利用点与点之间的关系建立相似度矩阵,求出其特征向量,利用每个点的特征向量进行K-Means聚类。计算点与点之间的相似度。
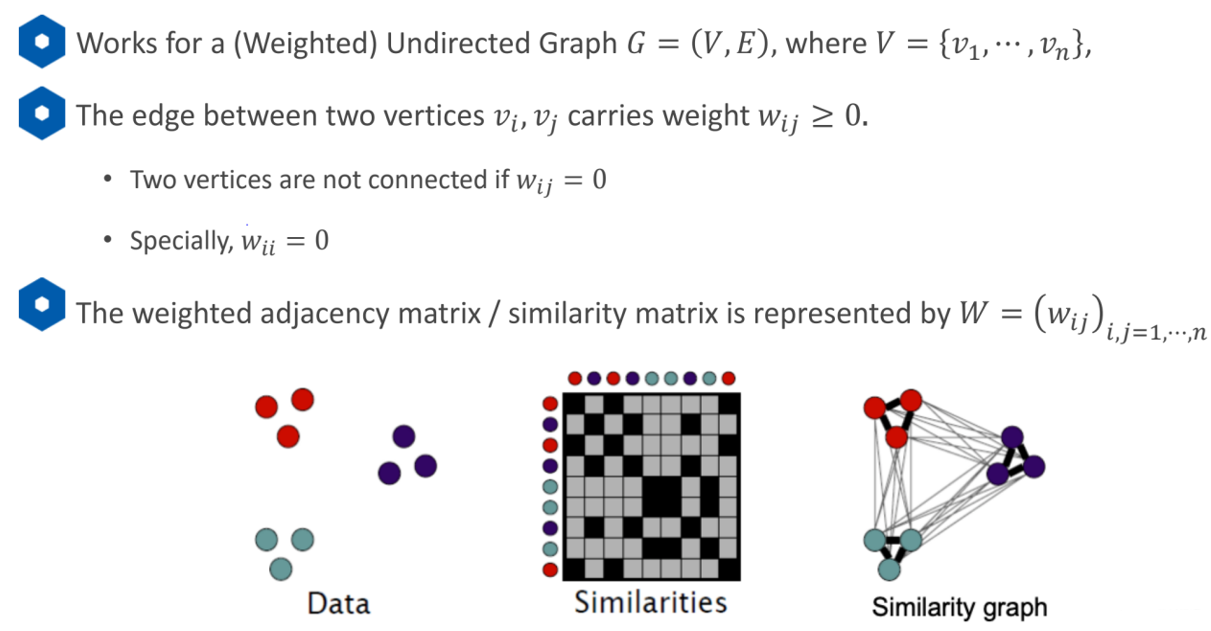
无向图矩阵建立方法:
1、每一个节点之间都有连线,相似度是根据距离
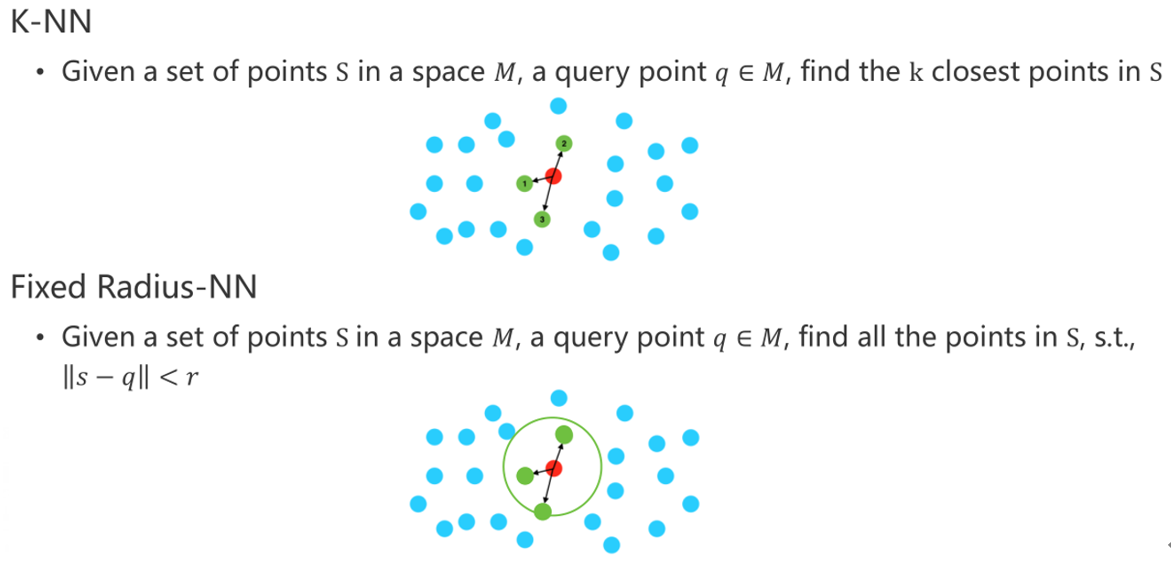
2、每个节点只选择与它距离相近的几个点连线KNN RNN
得到相似矩阵处理得到对角矩阵Degree matrixD,D矩阵对角线的值是所在那一行的和,意义是第i个节点,它所连接所有节点权重的和。
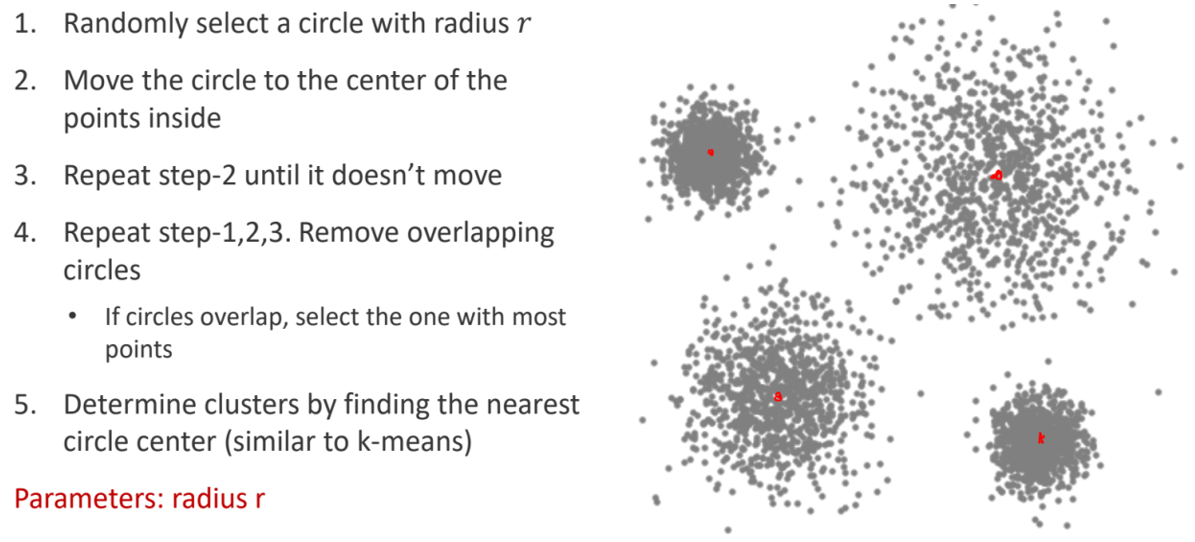
5.5 Mean Shift聚类
核心思想:一堆点,怎样让一个固定半径的圆尽可能的包含较多的点。将圆的中心随便放在一个位置坐标,计算所包含所有点的平均坐标,圆的中心再移动到平均坐标,再次计算包含所有点的平均坐标,如此重复,直到点中心坐标不再改变为止。 其结果并不是最优的。输入只需要设定圆的半径,并不需要设定多少类,自动去发现。(爬山思想)
 5.6 DBSCAN
5.6 DBSCAN
核心思想:水漫金山,基于点与点连接,只要能够连接到就是一类

6. 点云拟合
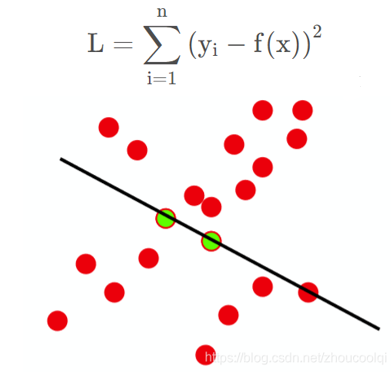
6.1 最小二乘法
最小二乘方法,即通过最小化误差的平方和寻找数据的最佳函数匹配,最小二乘得到的是针对所有数据的全局最优,但是并不是所有数据都是适合去拟合的。
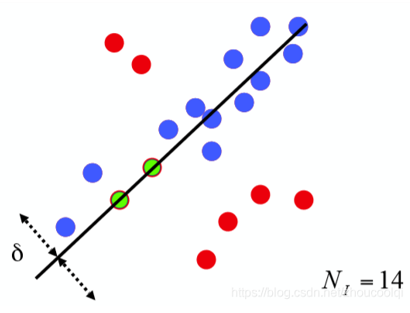
6.2 RANSAC随机抽样一致算法
采用迭代的方式从一组包含离群(outlier或者错误数据)的被观测数据中估算出数学模型的参数,相比最小二乘方法,它融合了剔除不合格数据的思想,因此对于有部分错误数据的数据样本,能够更快更准的给出辨识结果。用于三维点云处理中的模型提取,比如直线、球、圆柱、平面等的拟合与分割。
输入:
data —— 一组观测数据
model —— 适应于数据的模型
n —— 适用于模型的最少数据个数
k —— 算法的迭代次数
t —— 用于决定数据是否适应于模型的阀值
d —— 判定模型是否适用于数据集的数据数目
输出:
best_model —— 跟数据最匹配的模型参数
best_consensus_set —— 估计出模型的数据点
best_error —— 跟数据相关的估计出的模型错误
7. 点云特征点提取与描述
特征点的数量相比于原始点云或图像的数据量减小很多,与局部特征描述子结合在一起,组成特征点描述子常用来形成原始数据的表示,而且不失代表性和描述性,从而加快了后续的识别,追踪等对数据的处理了速度,特征点技术成为在2D和3D 信息处理中非常关键的技术。关键点检测往往需要和特征提取联合在一起,关键点检测的一个重要性质就是旋转不变性。
7.1 特征点提取
-
3DHarris
Harris 算法,其思想及数学推导大致如下:
1. 在图像中取一个窗 w (矩形窗,高斯窗,XX窗,各种窗)
2. 获得在该窗下的灰度 I
3.移动该窗,则灰度会发生变化,平坦区域灰度变化不大,
边缘区域沿边缘方向灰度变化剧烈,角点处各个方向灰度变化均剧烈
依据3中条件选出角点
① 两个特征值都很大==========>角点(两个响应方向)
② 一个特征值很大,一个很小=====>边缘(只有一个响应方向)
③ 两个特征值都小============>平原地区(响应都很微弱)
3DHarris利用方块体内点数量变化确定角点,想象一下,如果在 点云中存在一点p:
1、在p上建立一个局部坐标系:z方向是法线方向,x,y方向和z垂直。
2、在p上建立一个小正方体,不要太大,大概像材料力学分析应力那种就行
3、假设点云的密度是相同的,点云是一层蒙皮,不是实心的。
a、如果小正方体沿z方向移动,那小正方体里的点云数量应该不变。
b、如果小正方体位于边缘上,则沿边缘移动,点云数量几乎不变,沿垂直边缘方向移动,点云数量改。
c、如果小正方体位于角点上,则有两个方向都会大幅改变点云数量。
如果由法向量x,y,z构成协方差矩阵,那么它应该是一个对称矩阵,而且特征向量有一个方向是法线方向,另外两个方向和法线垂直。那么直接用协方差矩阵替换掉图像里的M矩阵,就得到了点云的Harris算法。其中,半径r可以用来控制角点的规模,r小则对应的角点越尖锐(对噪声更敏感),r大则可能在平缓的区域也检测出角点。
-
NARF
对点云而言,场景的边缘代表前景物体和背景物体的分界线。所以,点云的边缘又分为三种:前景边缘,背景边缘,阴影边缘。NARF(Normal Aligned Radial Feature)关键点是为了从深度图像中识别物体而提出的,关键点探测的重要一步是减少特征提取时的搜索空间,把重点放在重要的结构上。
对NARF关键点提取过程有以下要求:提取的过程必须将边缘以及物体表面变化信息考虑在内;关键点的位置必须稳定,可以被重复探测,即使换了不同视角;关键点所在的位置必须具有稳定的支持区域,可以计算描述子并进行唯一的法向量估计。该方法提取步骤如下:
1、遍历每个深度图像点,通过寻找在邻近区域有深度突变的位置进行边缘检测。
2、遍历每个深度图像点,根据邻近区域的表面变化决定一种测度表面变化的系数,以及变化的主方向。
3、根据第二步找到的主方向计算兴趣值,表征该方向与其它方向的不同,以及该处表面的变化情况,即该点有多稳定。
4、对兴趣值进行平滑滤波。
5、进行无最大值压缩找到最终的关键点,即为NARF关键点。
-
SIFT3D
在高斯金字塔上来计算DoG,在尺度和空间上搜索图像的局部极值。例如在图像一个像素点的四邻域内进行比较,判断是否是局部极值,如果是局部极值,则可能是关键点。
PCL类SIFTKeypoint是将二维图像中的 SIFT 算子调整后移植到 3D 空间的 SIFT算子的实现。输入为带有 XYZ 坐标值和强度的点云,输出为点云中的 SIFT 关键点。
7.2 特征点描述
-
PFH
PFH通过参数化查询点和紧邻点之间的空间差异,形成了一个多维直方图对点的近邻进行几何描述,直方图提供的信息对于点云具有平移旋转不变性,对采样密度和噪声点具有稳健性。PFH是基于点与其邻近之间的关系以及它们的估计法线,也即是它考虑估计法线之间的相互关系,来描述几何特征。为了计算两个点及其相关法线之间的偏差,在其中一个点上定义了一个固定坐标系。

两个点之间的坐标系转换,利用α,φ,θ,d,四个元素可以构成PFH描述子。
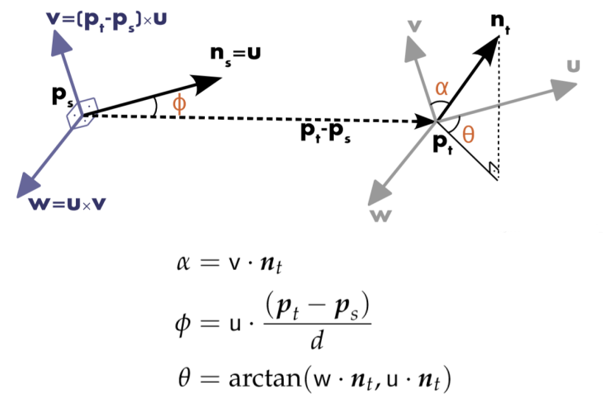
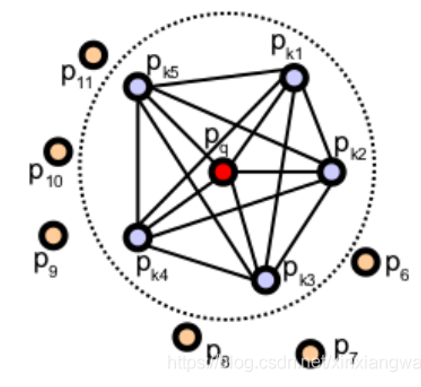
首先计算查询点Pq近邻内的对应的所有四个元素,如图所示,表示的是一个查询点(Pq) 的PFH计算的影响区域,Pq 用红色标注并放在圆球的中间位置,半径为r, (Pq)的所有k邻元素(即与点Pq的距离小于半径r的所有点)全部互相连接在一个网络中。最终的PFH描述子通过计算邻域内所有两点之间关系而得到的直方图。
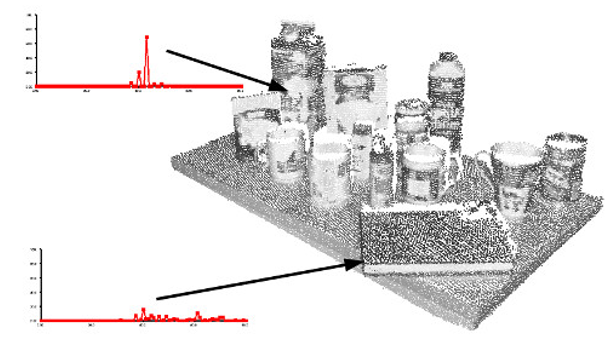
生成最终的对每个查询点的PFH代表,四要素这个集合将放到直方图里面。分发的过程是把所有的特征(上面的3个角度,一个距离的平方)平均分割成b小份,然后数每个子区间上的个数。因为有3个特征是法线间的角度,所以他们可以很好的归一化并把它们放到三角函数的圆(高中知识)里面。一个分发的案例是把每个特征区间进行平均分配,然后我们就有了一个有b的四次方分发的柱状图。在这个图里面有一个区间的值不为0代表着,它这个特征有一定的值。下面的这幅图展示了一个点云里面不同点的PFH图。
-
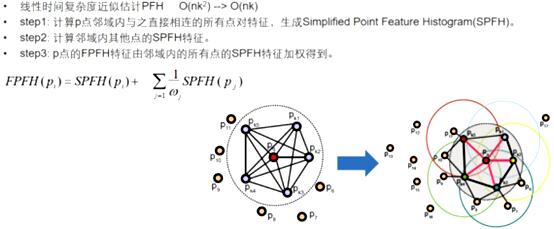
SPFH
只计算每个查询点Pq和它邻域点之间的三个特征元素(参考PFH),在这里不同于PFH:PFH是计算邻域点所有组合的特征元素,而这一步只计算查询点和近邻点之间的特征元素。如下图,第一个图是PFH计算特征过程,即邻域点所有组合的特征值(图中所有连线,包括但不限于Pq和Pk之间的连线),第二个图是step1中计算内容,只需要计算Pq(查询点)和紧邻点(图2中红线部分)之间的特征元素。可以看出降低了复杂度我们称之为SPFH(simple point feature histograms)
-
基于坐标系Signature based
SHOT:首先将点邻域空间分成几个子空间,然后对子空间中每个点的法向特征统计到直方图进行编 码,再将每个子空间的直方图联合到一起得到三维描述子。此方法对于含有噪声、杂波的点云以及密度不均的点云都具有一定的鲁棒性、高效性和较好的描述性。
1. 建立坐标系LRF
2. 将特征点周围空间分成32块
3. 计算每个小空间的直方图,每个直方图长度是11

8. 点云匹配
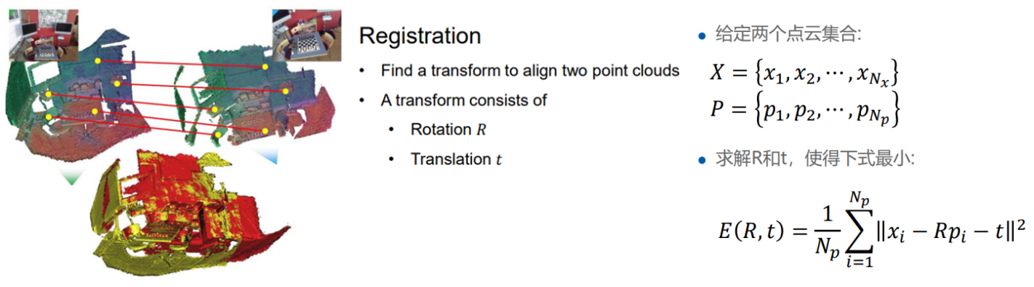
8.1 ICP基于距离
ICP通过迭代的方式,通过优化相对位姿,不断减小两帧点云之间点到点的距离,直到迭代收敛,最终计算出两帧点云的相对位姿。首先找到两组点云之间的对应问题,在ICP里面找最邻近的点,强行得到R,t,点一开始显然是不对的,但这是一个迭代的过程,直到R,t变化很小。可以用IMU来得到初始化的R,t。
ICP改进:
① 减少点
不用所有的点做ICP
对点云下采样
Normal Space Sampling(NSS)
② 数据关联
最邻近搜寻
Normal shooting:适用与平滑的点云
Projection
Feature descriptor matching
③ 去除噪点
去除远距离
去除不匹配的点
④ Loss function
Point-to-point
point-to-plane
点到最邻近点平面的距离,point-to-point可能会强行对应点,point-to-plane收敛更快。LOAM
点云ICP算法的优点包括:
- 算法简单易懂,易于实现和理解;
- 对于初始位姿估计较为准确的情况下,配准精度较高。
点云ICP算法的缺点包括:
- 对于大规模点云数据,算法的时间和空间复杂度较高,难以实现实时处理;
- 对于初始位姿估计不准确或存在环路等情况时,算法易受局部极小值的影响,可能导致配准失败或者配准精度较低。
8.2 NDT基于概率
NDT是将参考点云转换成多维变量的正态分布来进行配准。以一个格子一个格子为单位,找点落在哪个格子,格子里面的信息是一个高斯模型来描述点云的分布。

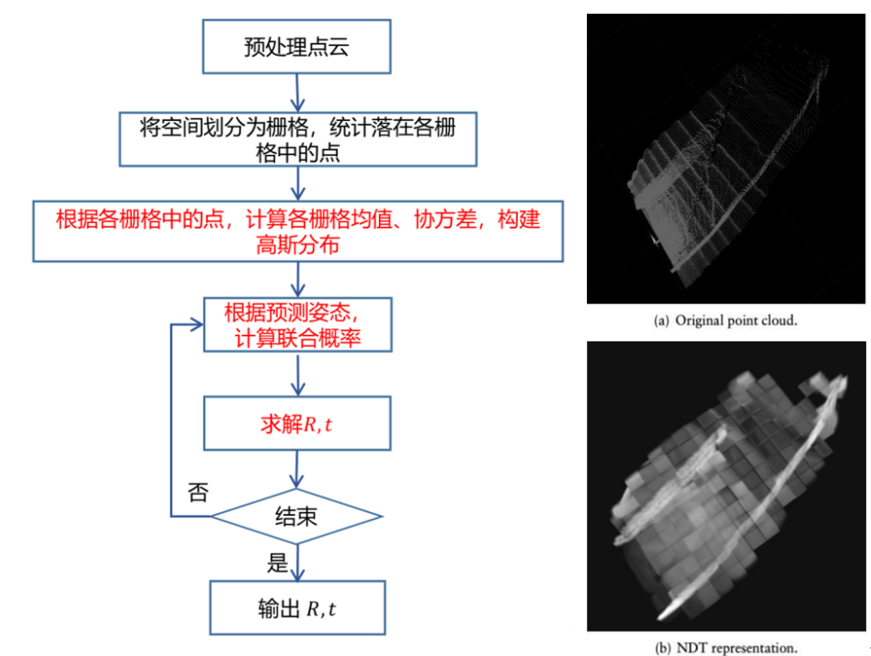
NDT缺点:格子参数最重要,太大导致精度不高,太小导致内存过高,并且只有两幅图像相差不大的情况才能匹配。
改进:
① 八叉树建立,格子有大有小 ,迭代,每次使用更精细的格子
② K聚类,有多少个类就有多少个cell,格子大小不一
③ 三线插值 平滑相邻的格子cell导致的不连续,提高精度
NDT算法的优点包括:
- 算法不受初始位姿的影响,配准精度较高;
- 对于大规模点云数据,算法的时间和空间复杂度较低,适合实现实时处理。
NDT算法的缺点包括:
- 对于运动过程中,点云数据的变形和变化较大的情况下,算法的配准精度较低;
- 算法对点云数据的密度和分布有一定的要求,需要较为均匀和连续的点云数据才能达到较好的配准效果。
用PCL库实现点云基础操作的代码在我之前的博客中
C++点云PCL基础ROS代码_c++可以直接替换pcl::pointxyz_桦树无泪的博客-CSDN博客
现在,你应该对点云这一数据类型有了充足的认识,下一次将讲述一些SLAM中的数学概念