前言
本文展示了如何执行基本的加速度计校准(使用任务规划器)。必须对自动驾驶仪中的加速度计进行校准,以纠正其在所有三个轴上的偏置,以及任何离轴变化。
!Attention
在 ArduPilot 中,加速度计的校准是强制性的。
!Important
当飞行器处于解锁状态时,不能进行加速度计校准。
1 校准步骤
!Warning
如果电路板被安装在一个非标准的方向(即箭头不指向前方),那么在进行加速度计校准之前,请确保 AHRS_ORIENTATION 被正确设置。
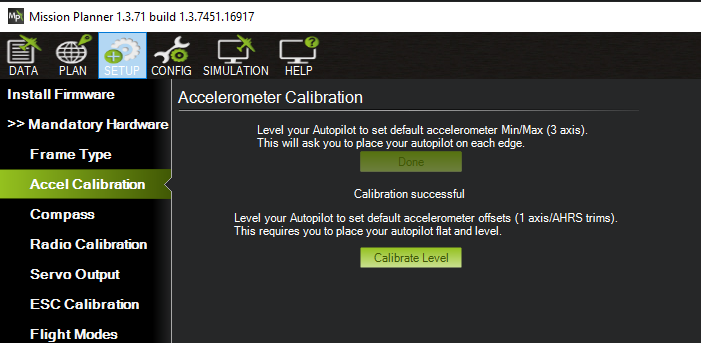
1. 在 Setup | Mandatory Hardware 下,从左侧菜单中选择 Accel Calibration。

2. 点击 Calibrate Accel 开始完整的三轴校准。
在校准过程中,Mission Planner 将提示你将飞行器摆放在每个轴上。按任何键表示自动驾驶仪已就位,然后进入下一个方向。
校准位置是:水平、右侧、左侧、机头向下、机头向上和背面。

在按下每个步骤的按键后,飞行器必须立即保持静止。这比完全正确的角度更重要,即左边与水平面成 90 度,等等。除了第一个"LEVEL",其他的位置可以在 20 度以内。当你按下按键时,在每个位置上保持静止是更重要的。
- 如果可能的话,你应该对安装在飞行器上的板子进行校准;
- 然而,如果飞行器的尺寸/形状使之难以做到,你可能需要在安装前对电路板进行校准;
- 水平位置是最重要的,因为这将是你的控制员认为飞行时的水平姿态;
- 你可以在安装好飞行控制器并准备好飞行后,使用任务规划器重新校准这个水平位置。将飞行器置于水平飞行姿态,使用校准水平按钮。
!Note
这个校准水平操作只能纠正初始校准和飞行器中的最终位置之间的 10 度差异,而且只能纠正俯仰和横滚差异,不能纠正偏航。
3. 通过所需的位置,一旦达到每个位置并保持不动,就使用"完成时点击"按钮。
4. 当你完成校准过程时,Mission Planner 将显示"校准成功!",如下所示。
!Note
如果你的自动驾驶仪有一个内置的 IMU 加热器,那么建议同时进行 IMU 温度校准(IMU Temperature Calibration)。有些自动驾驶仪在出厂时就已经完成了这一校准,在这种情况下,不需要再进行这一校准。
2 简单校准
有时,对于非常大的飞行器,要做完整的三轴校准并不容易。在这种情况下,简单加速度计校准可以在飞行器保持静止和水平状态下进行。这只是校准加速度计的主要偏移,而不是微小的轴外变化,所以它在最佳性能方面并不理想,但有时是可以接受的折衷办法。
!Note
这与校准水平的功能不一样。要使用该功能,必须先进行完整的三轴校准或简单的校准。
3 视频演示(旋翼)
加速度计校准的视频演示。这是一个旧版本的 Copter/Mission Planner,但作为你如何持有 Copter的一个例子是有用的。