0 前言
DLoopDetector是DBoW2作者的另一个开源项目,github地址为https://github.com/dorian3d/DLoopDetector。它对应的学术论文也是《Bags of Binary Words for Fast Place Recognition in Image Sequences》。像之前的博文(链接)说的,该论文中包含两部分内容:基于BRIEF描述子建立vocabulary tree,和利用vocabulary tree和一些校验方法进行回环检测,DLoopDetector对应的就是后半部分。
看一下作者的项目介绍:DLoopDetector用于对移动机器人采集的图像序列做回环检测,它基于提取特征创建的bag-of-words和database,和局部连续性以及几何条件的约束。DLoopDetector中会用到DBoW2库,也需要OpenCV和boost::dynamic_bitset(用于表示BRIEF特征描述子)的支持。
1 工程下载与编译
先下载工程,之后需要下载demo运行需要的测试集文件resources.tar.gz(原地址为https://drive.google.com/uc?export=download&id=1MpZwPjXDAUxKfSTpeCjG0PAUpaeWuo7D,如果下载不了可以到这里下载)后进入工程所在目录,依次执行
cp 文件所在目录/resources.tar.gz .
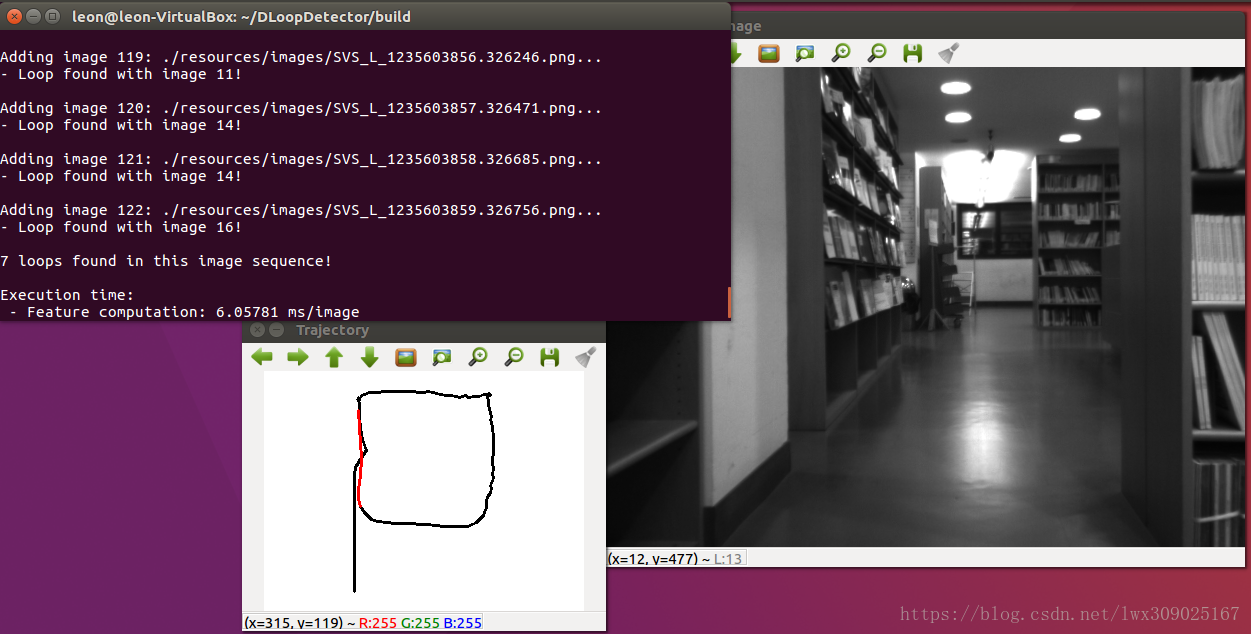
编译过程中会下载DBoW2和DLib,在build目录下会生成demo_brief可执行文件。执行后运行画面如下,“Trajectory”窗口中红色线段表示程序检测到了回环。
2 算法原理
首先把参考论文捋一捋,了解作者的开发思想。着重看论文的第五部分V. LOOP DETECTION ALGORITHM。首先,利用DBoW2我们已经可以计算图像的相似度了,相似度高的图像将作为回环检测的备选图像。不过由于perceptual aliasing,需要对备选图像做进一步的验证,具体步骤如下。
1)Database query
利用建立的vocabulary tree和database,得到与输入图像相似度评分较高的备选图像集,使用
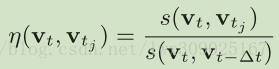
公式中分母表示输入图像和它的上一帧图像间的相似度评分。作者提到一些情况下分母会比价小(譬如发生旋转时)导致评分偏高,因此对分母有一个大小的约束。之后对得到的归一化评分也做了大小约束,大于限定值alpha的图像进入之后的处理。
2)Match grouping
一般情况下若图像A和B出现回环的情况,则A和B附近的图像也倾向于判定为回环,不过这样的判定意义不大且浪费了计算时间。作者提出把这些时间上相近的图像划分为一个island,把输入图像和一个island看做一次匹配。因此时间上相近的多次匹配

从得到的几个islands中选出得分最高的那一组进入后面的操作。
3)Temporal consistency
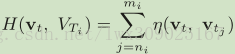
作者认为,如果图像A与B出现回环,则A附近的图像应该在B附近也会出现回环的情况。因此定义了如下的局部连续性约束:对于匹配

4)Efficient geometrical consistency
对于输入图像A和备选图像B,作者通过RANSAC方法(可参考链接)计算它们之间的基本矩阵F,其中会用到前面提到的direct index加速特征点之间的匹配。若能得到F,则表明满足了几何约束条件,回环检测成立。
至此DLoopDetector的运行原理分析完毕,下一篇文章将具体分析其源代码。