目录
一、理论基础
高斯模型就是用高斯概率密度函数(正态分布曲线)精确地量化事物,将一个事物分解为若干的基于高斯概率密度函数(正态分布曲线)形成的模型。 对图像背景建立高斯模型的原理及过程:图像灰度直方图反映的是图像中某个灰度值出现的频次,也可以以为是图像灰度概率密度的估计。如果图像所包含的目标区域和背景区域相差比较大,且背景区域和目标区域在灰度上有一定的差异,那么该图像的灰度直方图呈现双峰-谷形状,其中一个峰对应于目标,另一个峰对应于背景的中心灰度。对于复杂的图像,尤其是医学图像,一般是多峰的。通过将直方图的多峰特性看作是多个高斯分布的叠加,可以解决图像的分割问题。 在智能监控系统中,对于运动目标的检测是中心内容,而在运动目标检测提取中,背景目标对于目标的识别和跟踪至关重要。而建模正是背景目标提取的一个重要环节。
混合高斯模型法是背景提取领域中比较常用的一种算法,这种方法通过对每一个像素点的亮度用若干个高斯模型来建模,使该方法在进行背景提取的时候具有一定的场景适应能力,可以克服其他背景提取算法(如:多帧平均法,统计中值法等)无法适应环境变化的缺点.对于多峰高斯分布模型,图像的每一个像素点按不同权值的多个高斯分布的叠加来建模,每种高斯分布对应一个可能产生像素点所呈现颜色的状态,各个高斯分布的权值和分布参数随时间更新。
当处理彩色图像时,假定图像像素点R、G、B三色通道相互独立并具有相同的方差。对于随机变量X的观测数据集{x1,x2,…,xN},xt=(rt,gt,bt)为t时刻像素的样本,则单个采样点xt其服从的混合高斯分布概率密度函数:

二、核心程序
.............................................................................
% Now update the weights. Increment weight for the selected Gaussian (if any),
% and decrement weights for all other Gaussians.
Weights = (1 - ALPHA) .* Weights + ALPHA .* matched_gaussian;
% Adjust Mus and Sigmas for matching distributions.
for kk = 1:K
pixel_matched = repmat(matched_gaussian(:, kk), 1, C);
pixel_unmatched = abs(pixel_matched - 1); % Inverted and mutually exclusive
Mu_kk = reshape(Mus(:, kk, :), D, C);
Sigma_kk = reshape(Sigmas(:, kk, :), D, C);
Mus(:, kk, :) = pixel_unmatched .* Mu_kk + ...
pixel_matched .* (((1 - RHO) .* Mu_kk) + ...
(RHO .* double(image)));
% Get updated Mus; Sigmas is still unchanged
Mu_kk = reshape(Mus(:, kk, :), D, C);
Sigmas(:, kk, :) = pixel_unmatched .* Sigma_kk + ...
pixel_matched .* (((1 - RHO) .* Sigma_kk) + ...
repmat((RHO .* sum((double(image) - Mu_kk) .^ 2, 2)), 1, C));
end
% Maintain an indicator matrix of those components that were replaced because no component matched.
replaced_gaussian = zeros(D, K);
% Find those pixels which have no Gaussian that matches
mismatched = find(sum(matched_gaussian, 2) == 0);
% A method that works well: Replace the component we
% are least confident in. This includes weight in the choice of
% component.
for ii = 1:length(mismatched)
[junk, index] = min(Weights(mismatched(ii), :) ./ sqrt(Sigmas(mismatched(ii), :, 1)));
% Mark that this Gaussian will be replaced
replaced_gaussian(mismatched(ii), index) = 1;
% With a distribution that has the current pixel as mean
Mus(mismatched(ii), index, :) = image(mismatched(ii), :);
% And a relatively wide variance
Sigmas(mismatched(ii), index, :) = ones(1, C) * INIT_VARIANCE;
% Also set the weight to be relatively small
Weights(mismatched(ii), index) = INIT_MIXPROP;
end
% Now renormalise the weights so they still sum to 1
Weights = Weights ./ repmat(sum(Weights, 2), 1, K);
active_gaussian = matched_gaussian + replaced_gaussian;
%----------------------------------------------------------------------
%--------------------------background Segment--------------------------
% Find maximum weight/sigma per row.
[junk, index] = sort(Weights ./ sqrt(Sigmas(:, :, 1)), 2, 'descend');
% Record indeces of those each pixel's component we are most confident
% in, so that we can display a single background estimate later. While
% our model allows for a multi-modal background, this is a useful
% visualisation when something goes wrong.
best_background_gaussian = index(:, 1);
linear_index = (index - 1) * D + repmat([1:D]', 1, K);
weights_ordered = Weights(linear_index);
for kk = 1:K
accumulated_weights(:, kk) = sum(weights_ordered(:, 1:kk), 2);
end
background_gaussians(:, 2:K) = accumulated_weights(:, 1:(K-1)) < BACKGROUND_THRESH;
background_gaussians(:, 1) = 1; % The first will always be selected
% Those pixels that have no active background Gaussian are considered forground.
background_gaussians(linear_index) = background_gaussians;
active_background_gaussian = active_gaussian & background_gaussians;
foreground_pixels = abs(sum(active_background_gaussian, 2) - 1);
foreground_map = reshape(sum(foreground_pixels, 2), HEIGHT, WIDTH);
foreground_with_map_sequence(:, :, tt) = foreground_map;
%----------------------------------------------------------------------
%---------------------Connected components-----------------------------
objects_map = zeros(size(foreground_map), 'int32');
object_sizes = [];
object_positions = [];
new_label = 1;
[label_map, num_labels] = bwlabel(foreground_map, 8);
for label = 1:num_labels
object = (label_map == label);
object_size = sum(sum(object));
if(object_size >= COMPONENT_THRESH)
%Component is big enough, mark it
objects_map = objects_map + int32(object * new_label);
object_sizes(new_label) = object_size;
[X, Y] = meshgrid(1:WIDTH, 1:HEIGHT);
object_x = X .* object;
object_y = Y .* object;
object_positions(:, new_label) = [sum(sum(object_x)) / object_size;
sum(sum(object_y)) / object_size];
new_label = new_label + 1;
end
end
num_objects = new_label - 1;
%---------------------------Shadow correction--------------------------
% Produce an image of the means of those mixture components which we are most
% confident in using the weight/stddev tradeoff.
index = sub2ind(size(Mus), reshape(repmat([1:D], C, 1), D * C, 1), ...
reshape(repmat(best_background_gaussian', C, 1), D * C, 1), repmat([1:C]', D, 1));
background = reshape(Mus(index), C, D);
background = reshape(background', HEIGHT, WIDTH, C);
background = uint8(background);
background_sequence(:, :, :, tt) = background;
background_hsv = rgb2hsv(background);
image_hsv = rgb2hsv(image_sequence(:, :, :, tt));
for i = 1:HEIGHT
for j = 1:WIDTH
if (objects_map(i, j)) && (abs(image_hsv(i,j,1) - background_hsv(i,j,1)) < 0.7)...
&& (image_hsv(i,j,2) - background_hsv(i,j,2) < 0.25)...
&& (0.85 <=image_hsv(i,j,3)/background_hsv(i,j,3) <= 0.95)
shadow_mark(i, j) = 1;
else
shadow_mark(i, j) = 0;
end
end
end
foreground_map_sequence(:, :, tt) = objects_map;
% objecs_adjust_map = objects_map & (~shadow_mark);
objecs_adjust_map = shadow_mark;
foreground_map_adjust_sequence(:, :, tt) = objecs_adjust_map;
%----------------------------------------------------------------------
end
%--------------------------------------------------------------------------
% -----------------------------Result display-------------------------------
figure;
while 1
for tt = 1:T
% tt = 30;
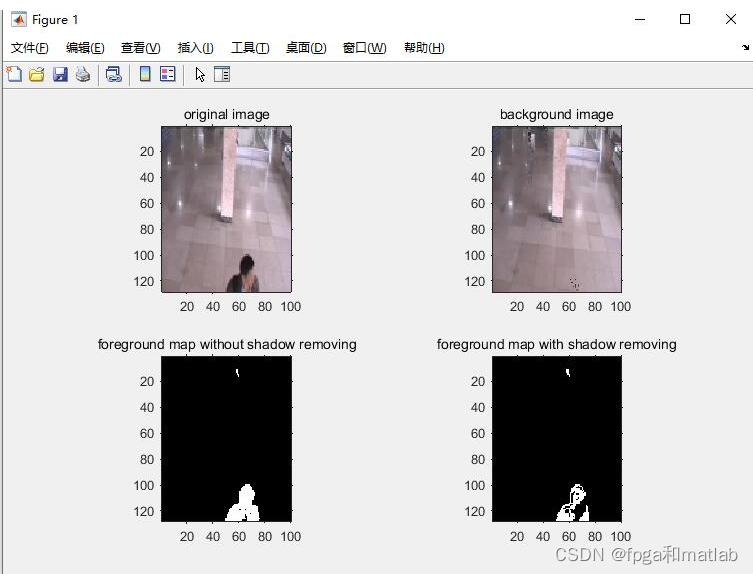
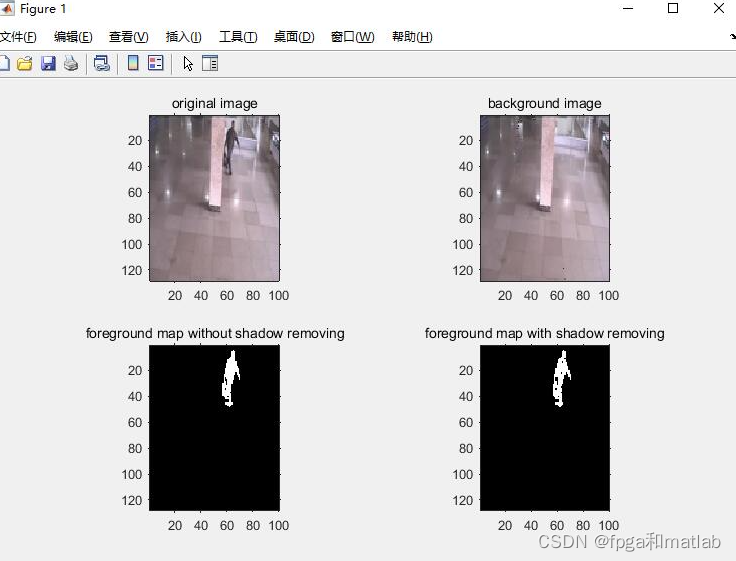
subplot(2,2,1),imshow(image_sequence(:, :, :, tt));title('original image');
subplot(2,2,2),imshow(uint8(background_sequence(:, :, :, tt)));title('background image');
subplot(2,2,3),imshow(foreground_map_sequence(:, :, tt)); title('foreground map without shadow removing');
% subplot(2,2,4),imshow(uint8(background_sequence(:, :, :, tt)));
subplot(2,2,4),imshow(foreground_map_adjust_sequence(:, :, tt));title('foreground map with shadow removing');
drawnow;pause(0.1);
end
end
up141三、仿真结论