目录
一、镜像底层原理
1.联合文件系统(UnionFS)
Union文件系统(UnionFS)是一种分层、轻量级并且高性能的文件系统,它支持对文件系统的修改作为一次提交来一层层的叠加,同时可以将不同目录挂载到同一个虚拟文件系统下。AUFS、OberlayFS及Devicemapper都是一种UnionFS。
Union文件系统是Docker镜像的基础。镜像可以通过分层来进行继承,基于基础镜像(没有父镜像),可以制作各种具体的应用镜像。
特性
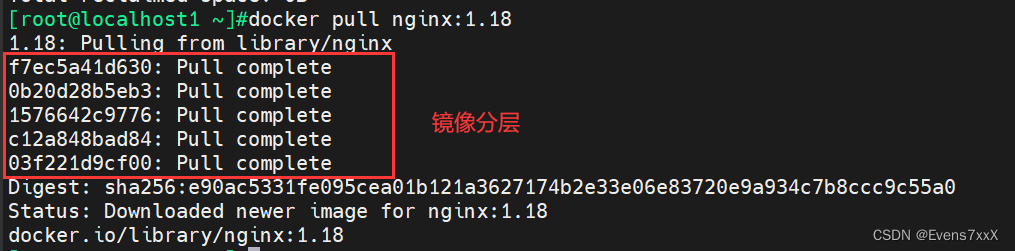
一次同时加载多个文件系统,但从外面看起来,只能看到一个文件系统,联合加载会把各层文件系统叠加起来,这样最终的文件系统会包含所有底层的文件和目录。
我们下载的时候看到的一层层的就是联合文件系统。
2.镜像加载原理
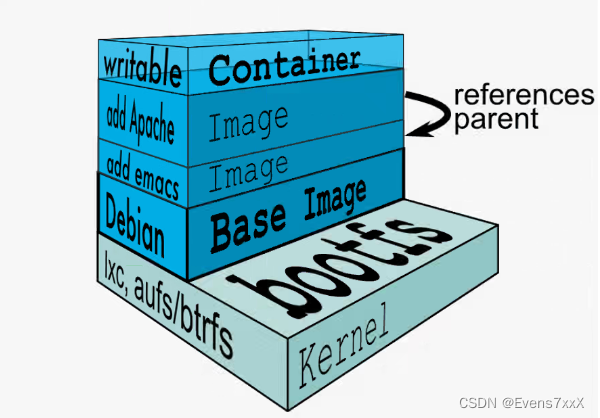
在Docker镜像的最底层是bootfs,这一层与我们典型的Linux/Unix系统是一样的,包含boot加载器和内核。当boot加载完成之后整个内核就都在内存中了,此时内存的使用权已由bootfs转交给内核,此时系统也会卸载bootfs。
rootfs,在bootfs之上。包含的就是典型Linux系统中的/dev,/proc,/bin,/etc等标准目录和文件。rootfs 就是各种不同的操作系统发行版,比如Ubuntu, Centos等等。
我们可以理解成一开始内核里什么都没有,操作一个命令下载debian,这时就会在内核上面加了一层基础image;再安装一个emacs,会在基础镜像上叠加一层image;接着再安装一个apache,又会在images上面再叠加一层image。最后它们看起来就像一个文件系统即容器的rootfs。
在Docker的体系里把这些rootfs叫做Docker的镜像。但是,此时的每一层rootfs都是只读read-only的,我们此时还不能对其进行操作。当我们创建一个容器,也就是将Docker镜像进行实例化,系统会在一层或是多层read-only的rootfs之上分配一层空的可读可写read-write的rootfs。
3.为什么Docker里的centos的大小才200M?
因为对于精简的OS,rootfs可以很小,只需要包含最基本的命令、工具和程序库就可以了,因为底层直接用宿主机的kernel,自己只需要提供rootfs就可以了。由此可见对于不同的linux发行版,bootfs基本是一致的,rootfs会有差别,因此不同的发行版可以公用bootfs。
二、Dockerfile
1.简介
Docker镜像是一个特殊的文件系统,除了提供容器运行时所需的程序、库、资源、配置等文件外,还包含了一些为运行时准备的一些配置参数 (如匿名卷、环境变量、用户等)。镜像不包含任何动态数据,其内容在构建之后也不会被改变。
镜像的定制实际上就是定制每一层所添加的配置文件。如果我们可以把每一层修改、安装、构建、操作的命令都写入一个脚本,用这个脚本来构建、定制镜像,那么镜像构建透明性的问题、体积的问题就都会解决。这个脚本就是Dockerfile。
Dockerfile是一个文本文件,其内包含了一条条的指令(Instruction),每一条指令构建一层,因此每一条指令的内容,就是描述该层应当如何构建。有了Dockerfile,当我们需要定制自己额外的需求时,只需在Dockerfile.上添加或者修改指令,重新生成image即可,省去了敲命令的麻烦。
Dockerfile结构大致分为四个部分:基础镜像信息、维护者信息、镜像操作指令和容器启动时执行指令。Dockerfile每行 支持一条指令,每条指令可携带多个参数,支持使用以“#“号开头的注释。
2.Dockerfile操作常用命令
(1)FORM 镜像
指定新镜像所基于的镜像,第一条指令必须为FROM指令,每创建一个镜像就需要一条FROM指令。
(2)MAINTAINER 维护人信息
说明新镜像的维护人信息。
(3)RUN 命令
在所基于的镜像上执行命令,并提交到新的镜像中,当命令较长时,可以使用\来换行。
(4)ENTRYPOINT
两种格式:
exec格式(数值格式):ENTRYPOINT ["要运行的程序","参数1","参数2"]
shell格式:ENTRYPOINT 命令 选项 参数
设定容器启动时第一个运行的命令及其参数。
可以通过使用命令docker run --entrypoint 来覆盖镜像中的ENTRYPOINT指令的内容。
(5)CMD
两种格式:
exec格式(数值格式):ENTRYPOINT ["要运行的程序","参数1","参数2"]
shell格式:ENTRYPOINT 命令 选项 参数
启动容器时默认执行的命令或者脚本,Dockerfile只能有–条CMD命令。如果指定多条命令,只执行最后一条命令。
如果在dockerrun时指定了命令或者镜像中有ENTRYPOINT,那么cmd就会被覆盖。
CMD可以为ENTRYPOINT 指令提供默认参数
命令在容器执行的优先级
docker run --entrypoint 命令 > ENTRYPOINT 命令 > docker run 命令 > CMD 命令
(6)EXPOSE 端口号
指定新镜像加载到Docker时要开启的端口。
(7)ENV 环境变量变量值
设置一个环境变量的值,会被后面的RUN使用。
(8)ADD 源文件/目录 目标文件/目录
将源文件复制到镜像中,源文件要与Dockerfile 位于相同目录中,或者是一个URL。
有如下注意事项
如果源路径是个文件,且目标路径是以/结尾, 则docker会把目标路径当作一个目录,会把源文件拷贝到该目录下。如果目标路径不存在,则会自动创建目标路径。
如果源路径是个文件,且目标路径是不以/结尾,则docker会把目标路径当作一个文件。如果目标路径不存在,会以目标路径为名创建一个文件,内容同源文件;如果目标文件是个存在的文件,会用源文件覆盖它,当然只是内容覆盖,文件名还是目标文件名。如果目标文件实际是个存在的目录,则会源文件拷贝到该目录下。注意, 这种情况下,最好显示的以/结尾,以避免混淆。
如果源路径是个目录,且目标路径不存在,则docker会自动以目标路径创建一个目录,把源路径目录下的文件拷贝进来。如果目标路径是个已经存在的目录,则docker 会把源路径目录下的文件拷贝到该目录下。
如果源文件是个归档文件(tar、bzip2压缩文件),则docker会自动帮解压。
URL下载和解压特性不能一 起使用。任何压缩文件通过URL拷贝,都不会自动解压。
(9)COPY
COPY 源文件/目录目标文件/目录
只复制本地主机上的文件/目录复制到目标地点,源文件/目录要与Dockerfile在相同的目录中
ADD和COPY的共同点
ADD和COPY都可以复制本地文件到镜像中。
ADD和COPY的区别
ADD可以将本地tar包解压后复制到镜像目录,也支持下载源文件。但不支持下载和解压同时使用。
COPY不支持解压,不支持下载。
(10)VOLUME ["目录"]
在容器中创建一个挂载点。
(11)USER 用户名/UID
指定运行容器时的用户。
(12)WORKDIR 路径
为后续的RUN、CMD、 ENTRYPOINT 指定工作目录。
(13)ONBUILD 命令
指定所生成的镜像作为一个基础镜像时所要运行的命令。
当在一个Dockerfile 文件中加上ONBUILD指令, 该指令对利用该Dockerfile构建镜像 (比如为A镜像) 不会产生实质性影响。
但是当编写一个新的Dockerfile文件来基于A镜像构建一个镜像 ( 比如为B镜像)时,这时构造A镜像的Dockerfile文件中的ONBUILD指令就生效了,在构建B镜像的过程中,首先会执行ONBUILD指令指定的指令,然后才会执行其它指令。
(14)AGR
设置编译镜像时加入的参数,使用ENV指令定义的环境变量始终会覆盖同名的ARG指令。
如:
ARG CONT_IMG_VER
ENV CONT_IMG_VER=v1.0.0
RUN echo $CONT_IMG_VER
docker build --build-arg VER=v2.0.0$CONT_IMG_VER原本是ARG传参的值v2.0.0,但被ENV指定的值覆盖变为v1.0.0
三、创建Docker镜像
Docker镜像的创建有三种方法
- 基于已有镜像创建
- 基于本地模板创建
- 基于Dockerfile创建(重点)
1.基于已有镜像创建
基于原有的镜像启动一个容器,在容器中执行操作


然后将修改后的容器提交为新的镜像,需要使用该容器的ID号创建新镜像
docker commit [选项] 容器名或id 镜像名:标签
-m #指定说明信息
-a #指定作者信息
-p #在提交时关闭正在运行的容器

2.基于本地模板创建
先获取容器export导出的模板文件
http://openvz.org/Download/template/precreated 开源社区中有很多现成的模板文件

然后import将模板导入为镜像


3.基于Dockerfile创建
在编写Dockerfile时,有严格的格式需要遵循
- 第一行必须使用FROM指令指明所基于的镜像名称;
- 之后使用 MAINTAINER指令说明维护该镜像的用户信息;
- 然后是镜像操作相关指令,如 RUN指令。每运行一条指令,都会给基础镜像添加新的一层。
- 最后使用CMD指令指定启动容器时要运行的命令操作。
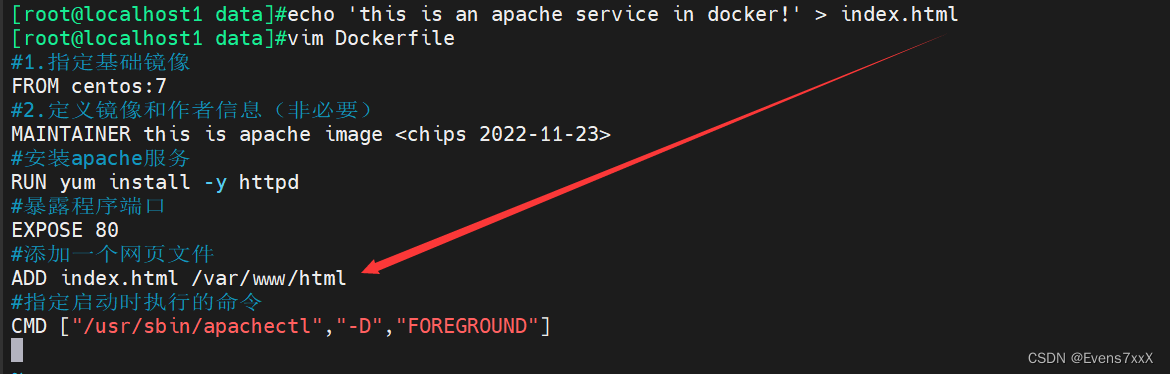
(1)基于yum安装apache服务的镜像
编写 Dockerfile(文件名固定!)
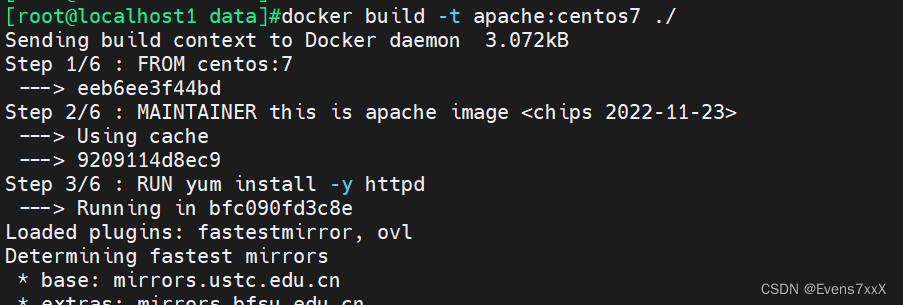
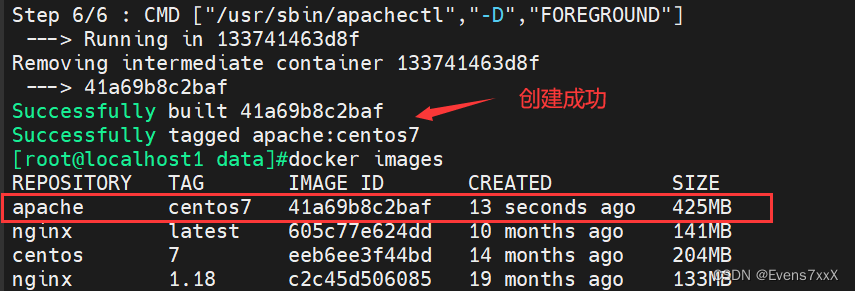
构建镜像
运行测试容器

(2)基于编译安装的nginx服务的镜像
编写Dockerfile
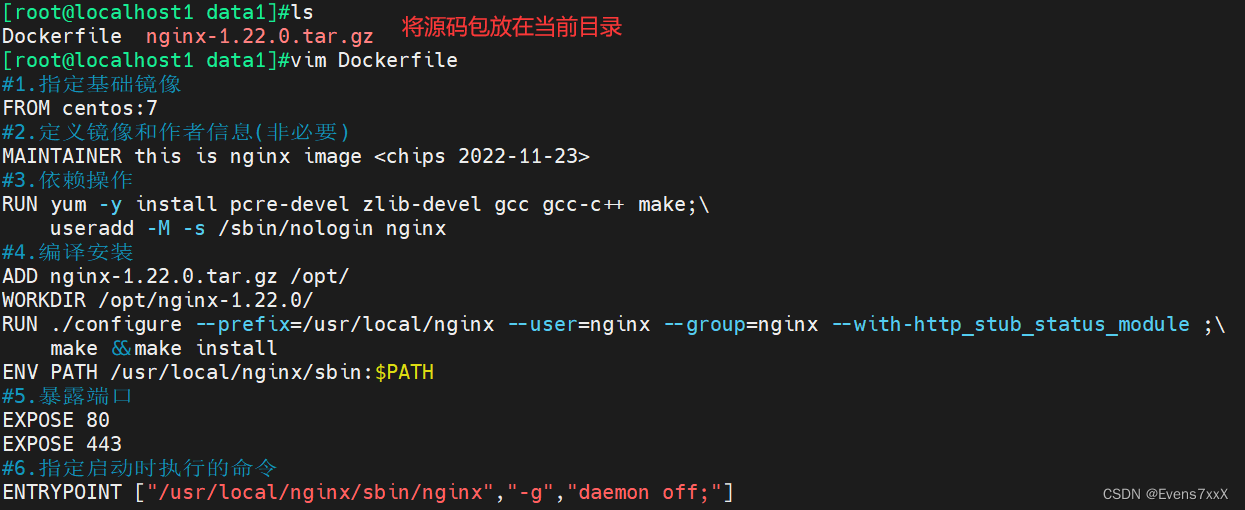
#1.指定基础镜像
FROM centos:7
#2.定义镜像和作者信息(非必要)
MAINTAINER this is nginx image <chips 2022-11-23>
#3.依赖操作
RUN yum -y install pcre-devel zlib-devel gcc gcc-c++ make;\
useradd -M -s /sbin/nologin nginx
#4.编译安装
ADD nginx-1.22.0.tar.gz /opt/
WORKDIR /opt/nginx-1.22.0/
RUN ./configure --prefix=/usr/local/nginx --user=nginx --group=nginx --with-http_stub_status_module ;\
make &&make install
ENV PATH /usr/local/nginx/sbin:$PATH
#5.暴露端口
EXPOSE 80
EXPOSE 443
#6.指定启动时执行的命令
ENTRYPOINT ["/usr/local/nginx/sbin/nginx","-g","daemon off;"]
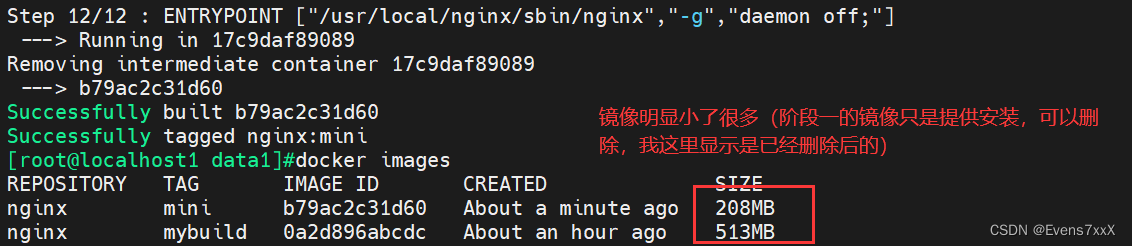
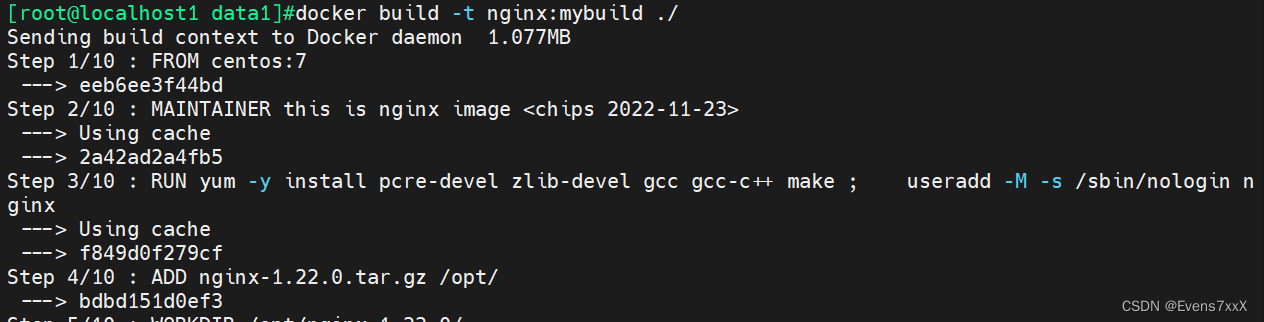
构建镜像
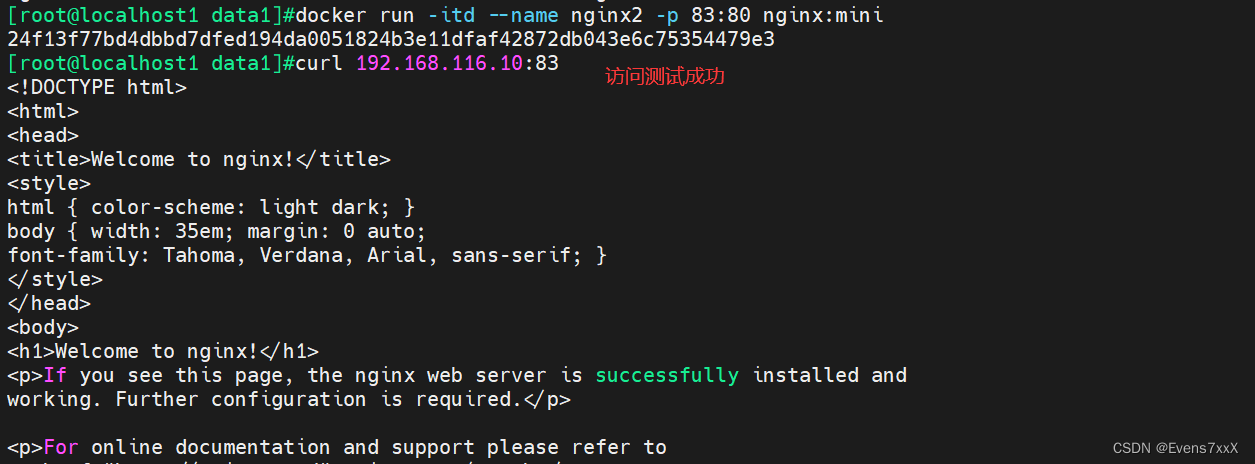
运行测试容器


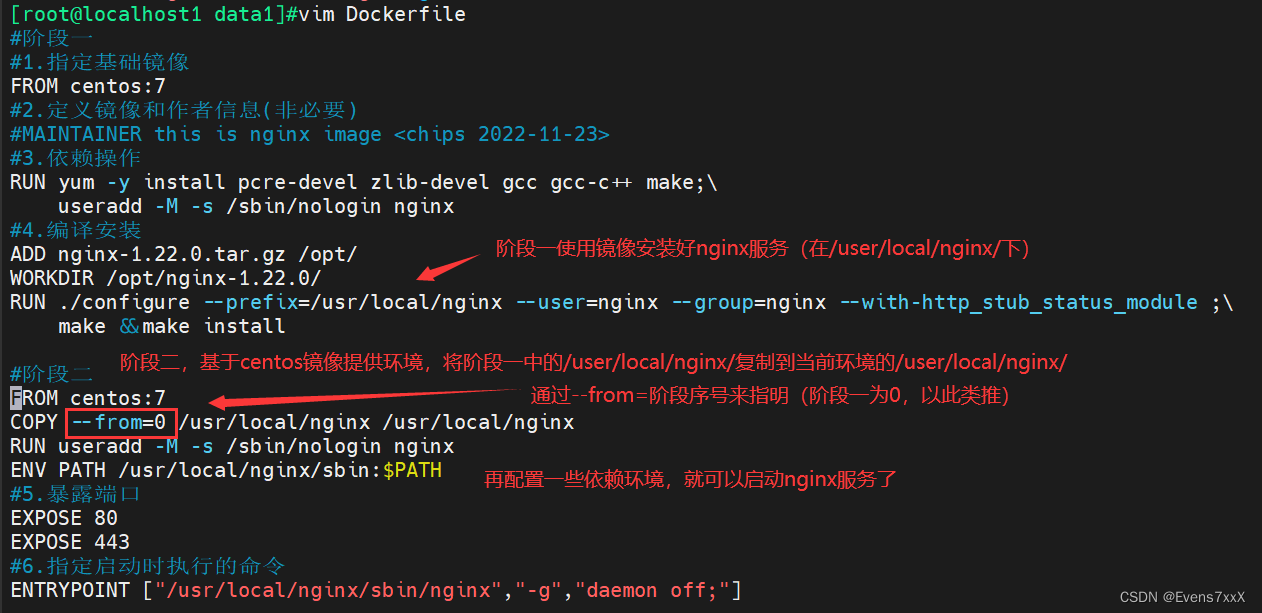
4.Dockerfile多阶段构建镜像
我们在构建docker镜像时,希望最后得到的镜像越小越好,但是在构建时,总是会用到各种各样复杂的环境,大部分都是临时环境,只是为了生成对应的目标程序。比如我们经常会在OpenCV环境下编译图像处理类程序,但其实目标程序只需要用的之前生成的子程序就行,不需要引入中间用到的环境。
这里我们就能用到Dockerfile多阶段构建,它可以把前面多个阶段生成的文件拷贝到下一个阶段使用,并且不引入之前用到的环境,这极大地解耦了我们的Dockerfile文件,而且最终可以得到一个极小的完整镜像。