“路威”教学机器人
产品介绍

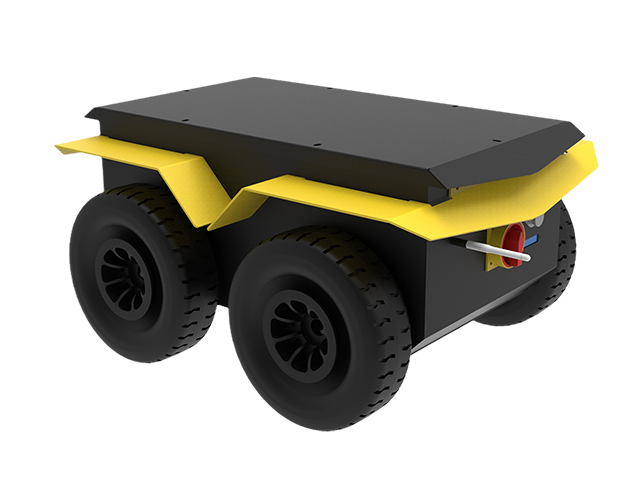
“路威”机器人是本公司潜心研发的一款专门用于ROS及自动驾驶技术学习的入门级套装产品,采用四轮四驱移动底盘,搭载英伟达最具性价比的学习套件NVIDIA Jestson Nano,可实现激光SLAM建图导航、图像识别、视觉跟踪、语义分析等功能,是学习STM32运动控制、机器人操作系统(ROS)、自动驾驶等技术的最佳平台,适合高校教学,实验室研究,企业算法原型验证。
技术特点
- 四轮四驱结构,通过改变两侧车轮的速度,实现前进、后退、 差速转弯及原地转向
- 基于STM32的主控板集成了四路驱动,通过串口向用户层实时反馈编码器和IMU信息,可实现机器人的定位导航
- 可以在学习各种AI算法的同时,学习ROS生态下的各种自动驾驶导航算法
性能参数
| 额定载重 | 5KG |
| 自重(含上装完整套件) | 6.5KG |
| 几何尺寸 | 425x325x282(mm) |
| 最快速度 | 0.65 m/s |
| 续航时间 | 满负荷工作3.2h |
应用场景

“路威”机器人在教学领域应用广泛,在多家高校投入使用。主要用于比赛以及算法平台研究。

“路威”机器人具有多种形态,可上装机器臂。上下位机代码接口开放,便于开发者进行二次开发。
“路驰”巡检机器人
产品介绍
路驰(Landrose)采用四驱差动结构,体积小巧,灵活轻便,可在狭小空间自由穿梭;车体重量轻、耗电小,便于搬运,可轻松放入小车尾箱运输。本产品支持CAN总线及RS232接口,是一个可靠性高、便于二次开发的移动机器人平台,适用于实验教学、研发测试、巡检、勘探等多种场景使用。
技术特点
- 四轮独立驱动: 四驱差动结构设计,四个电机独立驱动,转向灵活,能够实现原地转向
- 模块化设计: 采用CAN总线设备管理,接口部位的结构、尺寸和参数标准化
- 体型轻巧: 重量轻、耗电小,便于搬运转移
- 接口丰富: 提供48V/24V/12V/5V输出,支持RS232及CAN通讯接口,便于二次开发
性能参数
| 车体自重 | 37KG |
| 额定载重 | 40KG |
| 几何尺寸 | 704x561x343(mm) |
| 最快速度 | 1.5m/s |
| 车体材质 | Q235铁板 |
应用场景

“路驰”机器人主要用于园区巡检,运动控制算法等研究。

在国内部分园区落地,为智慧园区增光添彩。
“CCTV”管道机器人
产品介绍

CCTV管道机器人采用前后数字高清摄像单元,配备便携式手持平板控制终端,辅助强力照明光源和高精度计米线缆卷收装置,可根据车体行进速度自动匹配收放线速度,收线过程自动排线。可进入管道内部进行视频录像、缺陷抓拍、记录缺陷位置信息及制作专业的管道检测报告。
技术特点
- 双数字高清:前后同时采用数字高清摄像头
- 平板无线操控:手持式10.8英寸平板电脑,携带方便
- 密封防水技术:多年业内运动密封防水技术沉淀
- 模块化设计:采用模块化设计,安装简单、维护便捷、设备配件之间具备优越的互换性
性能参数
| 越障能力 | 最大爬坡能力可达40° |
| 防护等级 | IP68 |
| 驱动 | 瑞士进口马达,六轮驱动 |
| 几何尺寸 | 547 x 293 x 316(mm) |
| 线缆 | 2芯特种抗拉线缆 |
应用场景

“CCTV”管道巡检机器人主要用于特种作业,可下潜到水下5-10米的地方工作。

与国内部分业内厂家合作,已投入商用,可探索检查下水道、各类管道。
更多资讯,请关注理工智控!