提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
提示:以下是本篇文章正文内容,下面案例可供参考
一、简单实验
代码如下(示例):
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "timer.h"
#include "lcd.h"
#include "key.h"
#include "malloc.h"
#include "string.h"
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 256
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
//任务优先级
#define TASK1_TASK_PRIO 2
//任务堆栈大小
#define TASK1_STK_SIZE 256
//任务句柄
TaskHandle_t Task1Task_Handler;
//任务函数
void task1_task(void *pvParameters);
//任务优先级
#define DATAPROCESS_TASK_PRIO 3
//任务堆栈大小
#define DATAPROCESS_STK_SIZE 256
//任务句柄
TaskHandle_t DATAprocess_Handler;
//任务函数
void Dataprocess_task(void *pvParameters);
//任务优先级
#define test_TASK_PRIO 4
//任务堆栈大小
#define test_STK_SIZE 256
//任务句柄
TaskHandle_t test_Handler;
//任务函数
void test_task(void *pvParameters);
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4
delay_init(); //延时函数初始化
uart_init(115200); //初始化串口
LED_Init(); //初始化LED
KEY_Init(); //初始化按键
//创建开始任务
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
if(BinarySemaphore ==NULL)
{
printf("Bin Sem Creare Failed!\r\n");
}
//创建TASK1任务
xTaskCreate((TaskFunction_t )task1_task,
(const char* )"task1_task",
(uint16_t )TASK1_STK_SIZE,
(void* )NULL,
(UBaseType_t )TASK1_TASK_PRIO,
(TaskHandle_t* )&Task1Task_Handler);
//创建TASK2任务
xTaskCreate((TaskFunction_t )Dataprocess_task,
(const char* )"Dataprocess_task",
(uint16_t )DATAPROCESS_STK_SIZE,
(void* )NULL,
(UBaseType_t )DATAPROCESS_TASK_PRIO,
(TaskHandle_t* )&DATAprocess_Handler);
//创建TASK2任务
xTaskCreate((TaskFunction_t )test_task,
(const char* )"test_task",
(uint16_t )test_STK_SIZE,
(void* )NULL,
(UBaseType_t )test_TASK_PRIO,
(TaskHandle_t* )&test_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//task1任务函数
void task1_task(void *pvParameters)
{
while(1)
{
printf("test1");
vTaskDelay(100); //延时10ms,也就是10个时钟节拍
}
}
//Keyprocess_task函数
void Dataprocess_task(void *pvParameters)
{
while(1)
{
printf("test2");
vTaskDelay(100); //延时10ms,也就是10个时钟节拍
}
}
void test_task(void *pvParameters)
{
while(1)
{
printf("test3");
vTaskDelay(100); //延时10ms,也就是10个时钟节拍
}
}
输出结果如图
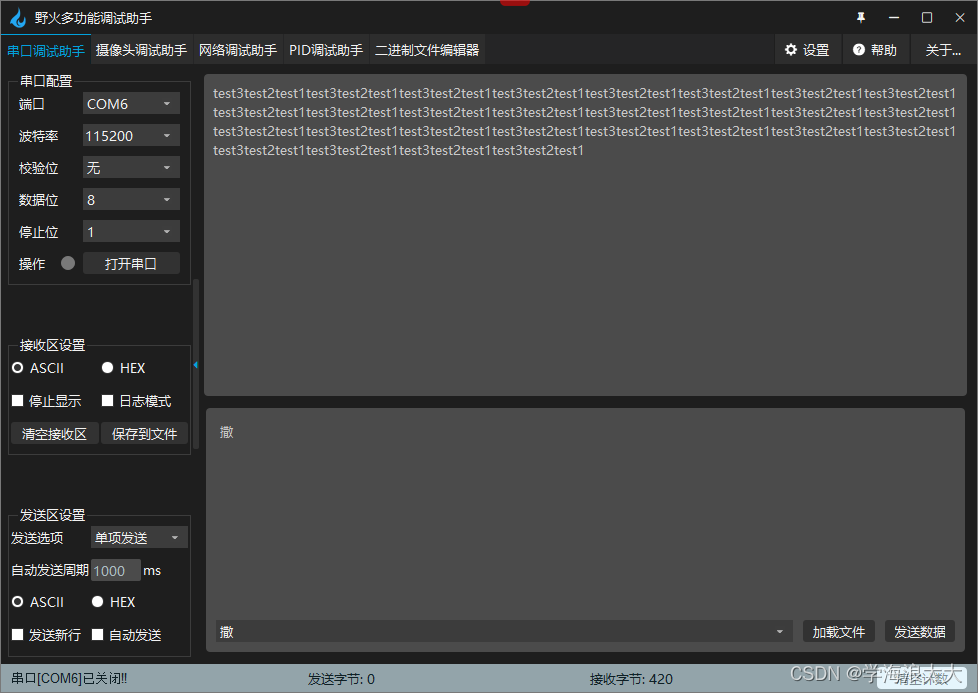
总结
RTOS中通过在任务函数中延时如: vTaskDelay(100); 就可以将任务停住,让下一个优先级的任务执行。