k邻近算法,英文全称K Nearest Neighbors,简称KNN
概念引入
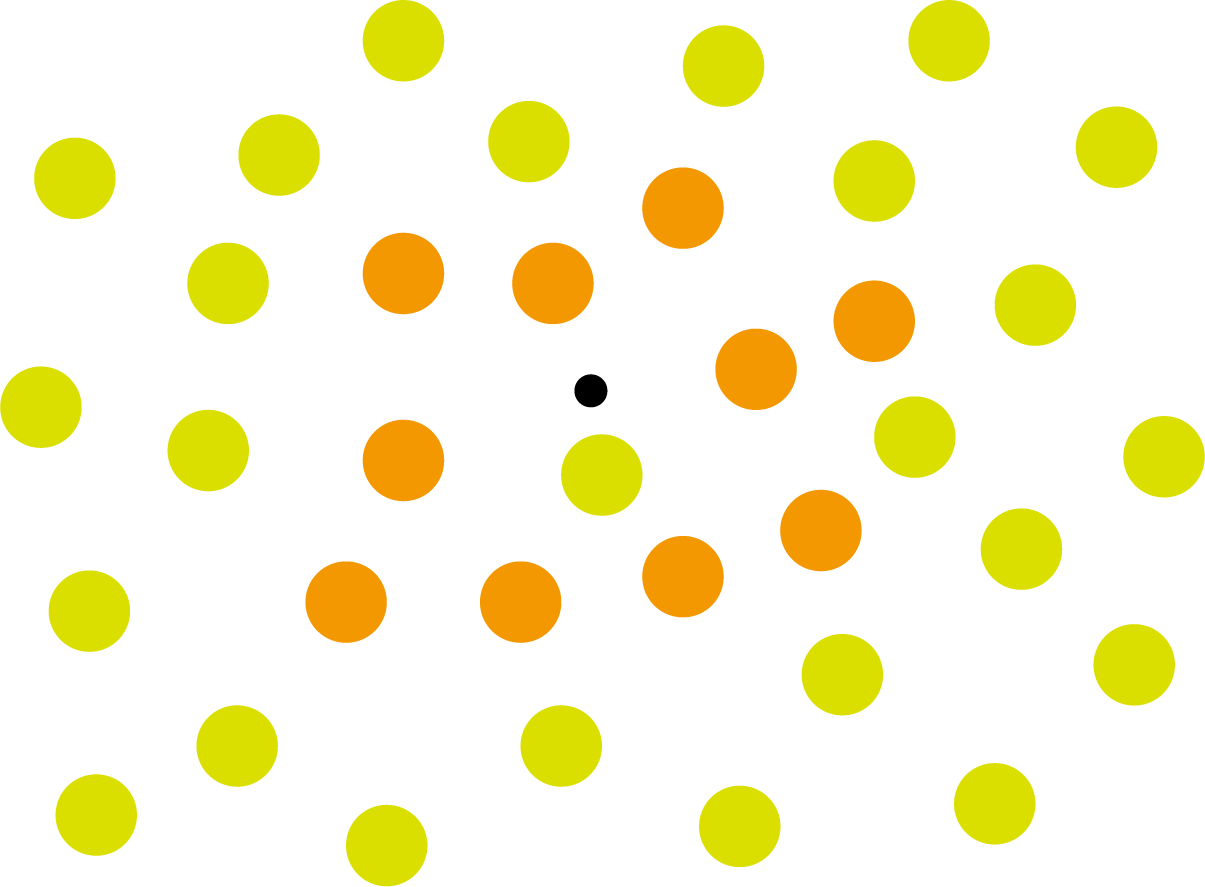
k邻近算法的基础原理其实十分简单。我们来看下面一个例子:

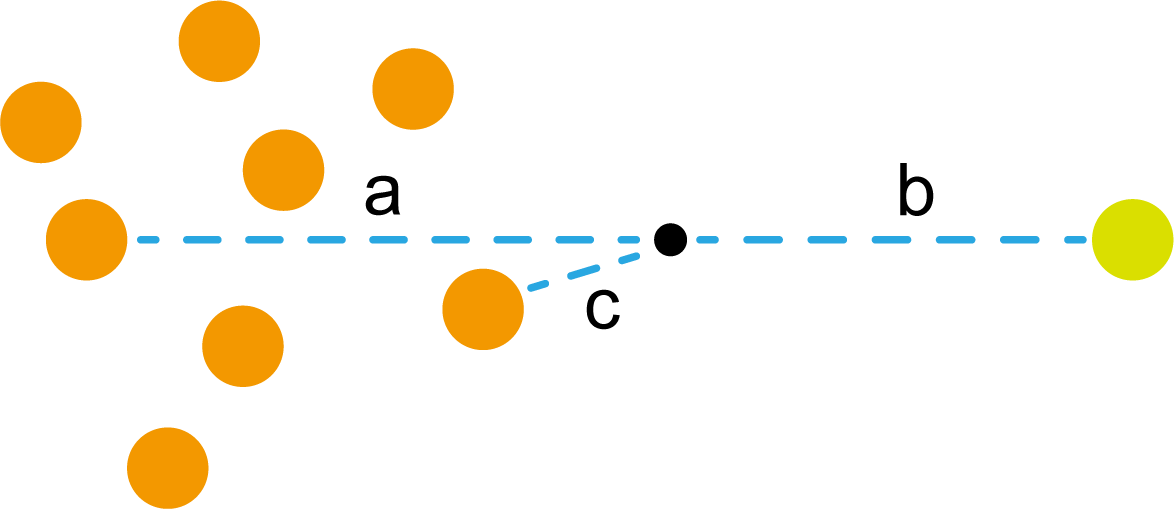
在橙色和浅黄绿色圆中间有一个小黑点。现在小黑点跟你说,它也想要靠边站,但是它不知道是跟橙色圆还是浅黄绿色圆,让你帮忙。相信你第一反应就是看小黑点跟谁近,跟谁近就属于谁。经过测量,发现小黑点与橙色圆的距离为a,与浅黄绿色圆的距离为b,而且 a > b a>b a>b。相信这时候你就知道小黑点应该属于谁了。这就是k邻近算法的基础原理,上图也是最简单的情况之一。
不过这时候,橙色圆不乐意了。凭什么小黑点归浅黄绿色?凭什么离得近就属于谁?于是他叫来了很多自己的兄弟。于是呈现出了下图的情况。
这时候橙色圆距离小黑点最近的距离变成了c,而且 c < b c<b c<b。这时候橙色圆说,小黑点应该归我们!浅黄绿色圆也不干了,它觉得应该算小黑点到所有圆距离的平均值,然后比较平均值大小。但是无奈橙色圆人多势众啊,于是浅黄绿色圆也叫来了自己的弟兄们。
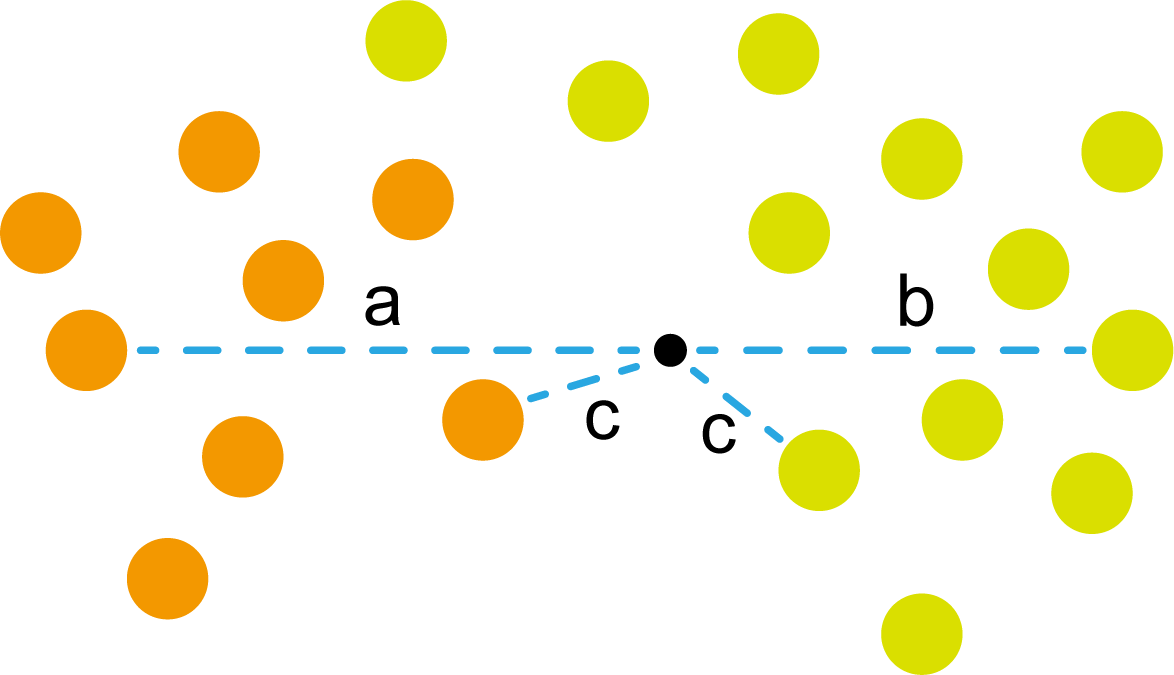
这些浅黄绿色圆更过分,直接跑到橙色圆跟前挑衅。经过测量,发现此时的小黑点到橙色圆和浅黄绿色圆的最近距离都是c。这下吵得不可开交了。火上浇油的时候,这时候紫色圆也跑了过来,也要抢小黑点。
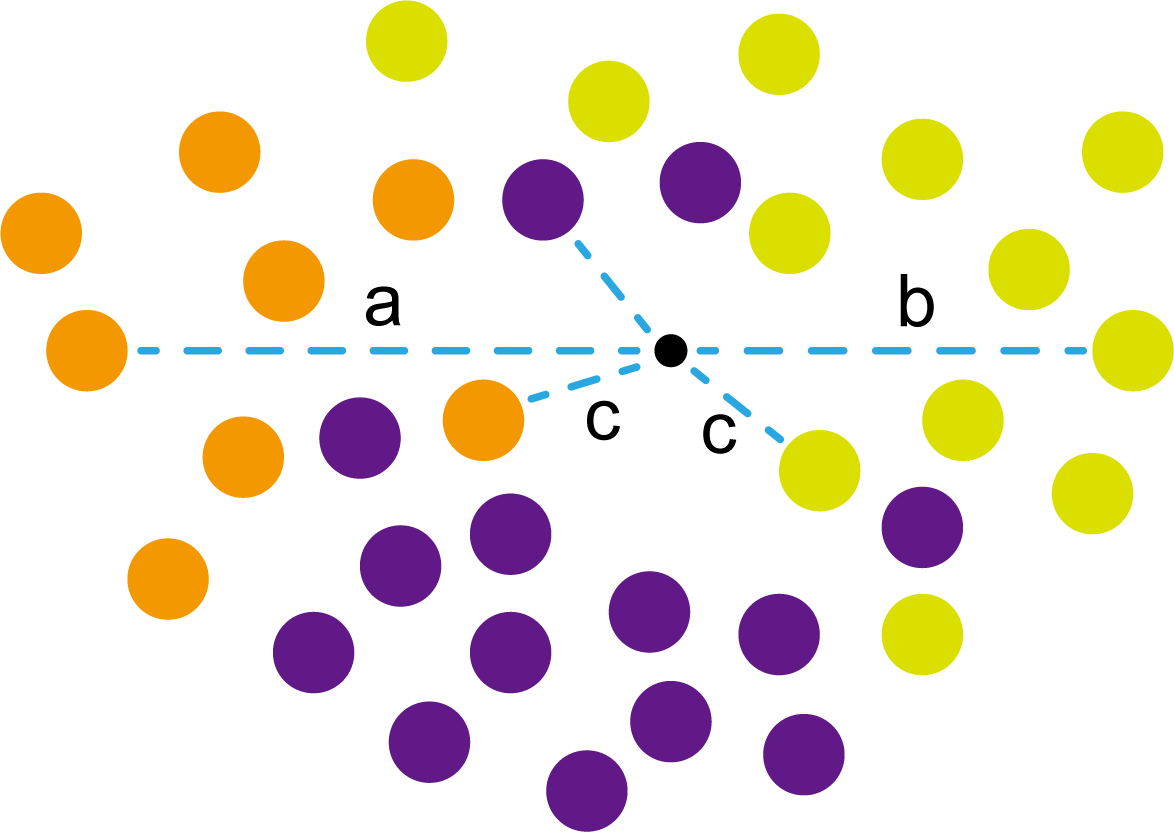
那么这时候应该将小黑点归属于谁呢?
这是个好问题。
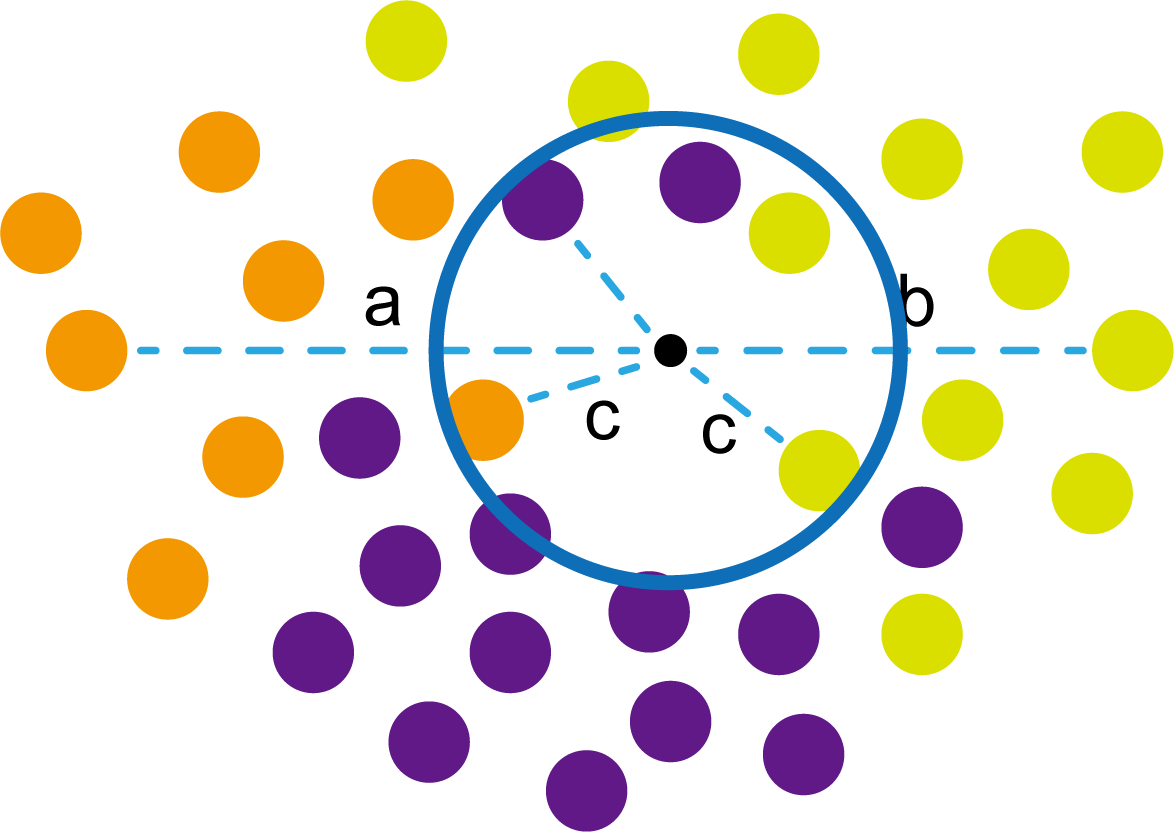
这里的评判标准有很多,而对于KNN算法来说,它的方法是在小黑点周围画一个圈,然后观察圈里哪个圆形的数量比较多,小黑点就属于谁。

我们采取四舍五入的方法,把在蓝色圈内的大于圆面积一半的圆算在园内,我们统计下三种颜色的圆各有多少个:
-
橙色:2个
-
浅黄绿色:6个
-
紫色:9个
这个统计的过程就是一个投票的过程。而这个投票由少数服从多数,所以在该情况下,小黑点应该属于紫色圆。在蓝色大圆中总共有17个小圆,所以k=17(一般实际情况下k不会取到17这么大)
但是KNN算法也会有失效的时候,比如下种情况:
在蓝色圈内的紫色圆数量和浅黄绿色圆的数量相同,这时候就无法判断出小黑点的归属。
相比于别的监督学习方法,KNN算法可以算作是极其简单的了。
KNN算法特点
(1)惰性。惰性的意思是不需要先对数据进行大量训练,只需要把已分类好的数据放在那就行。但是像线性回归算法等,都需要预先训练好权重参数等,才能放入进行归类或者预测。
KNN算法实现步骤
1)拥有类别的样本
就像第一个例子中的那些各种颜色的圆。如果没有那些各种颜色(一种颜色就是一种类别)的圆,那么就无从去判断“小黑点”究竟属于哪一类
2)选取测量距离的方式,测算未知类别的样本与所有已知类别的样本的距离
或许会有人觉得奇怪,测量距离的方式不就是两个点的最短路径吗还有别的方式吗?事实上,这里的距离应该指的是广义距离。下面我来介绍一下几种距离的方式。
① 欧式距离
欧式距离就是我们最常见的距离度量方法,就是两点之间的最短距离。
假设两个点的坐标分别为 x 1 ( x 11 , x 12 , x 13 , ⋅ ⋅ ⋅ , x 1 n ) x_1(x_{11},x_{12},x_{13},···,x_{1n}) x1(x11,x12,x13,⋅⋅⋅,x1n), x 2 ( x 21 , x 22 , x 23 , ⋅ ⋅ ⋅ , x 2 n ) x_2(x_{21},x_{22},x_{23},···,x_{2n}) x2(x21,x22,x23,⋅⋅⋅,x2n),(我们也称 x 11 , x 12 , x 13 , ⋅ ⋅ ⋅ , x 1 n x_{11},x_{12},x_{13},···,x_{1n} x11,x12,x13,⋅⋅⋅,x1n为 x 1 x_1 x1的特征)则这两个点的欧式距离为:
L ( x 1 , x 2 ) = ∑ i = 1 n ( x 1 i − x 2 i ) 2 L(x_1,x_2)=\sqrt{\sum_{i=1}^n{(x_{1i}-x_{2i})^2}} L(x1,x2)=i=1∑n(x1i−x2i)2
② 曼哈顿距离
假设两个点的坐标分别为 x 1 ( x 11 , x 12 , x 13 , ⋅ ⋅ ⋅ , x 1 n ) x_1(x_{11},x_{12},x_{13},···,x_{1n}) x1(x11,x12,x13,⋅⋅⋅,x1n), x 2 ( x 21 , x 22 , x 23 , ⋅ ⋅ ⋅ , x 2 n ) x_2(x_{21},x_{22},x_{23},···,x_{2n}) x2(x21,x22,x23,⋅⋅⋅,x2n),则这两个点的曼哈顿距离为:
L ( x 1 , x 2 ) = ∑ i = 1 n ∣ x 1 i − x 2 i ∣ L(x_1,x_2)=\sum_{i=1}^n|x_{1i}-x_{2i}| L(x1,x2)=i=1∑n∣x1i−x2i∣
③ 切比雪夫距离
假设两个点的坐标分别为 x 1 ( x 11 , x 12 , x 13 , ⋅ ⋅ ⋅ , x 1 n ) x_1(x_{11},x_{12},x_{13},···,x_{1n}) x1(x11,x12,x13,⋅⋅⋅,x1n), x 2 ( x 21 , x 22 , x 23 , ⋅ ⋅ ⋅ , x 2 n ) x_2(x_{21},x_{22},x_{23},···,x_{2n}) x2(x21,x22,x23,⋅⋅⋅,x2n),则这两个点的切比雪夫距离为:
L ( x 1 , x 2 ) = ( ∑ i = 1 n ∣ x 1 i − x 2 i ∣ p ) 1 p L(x_1,x_2)=(\sum_{i=1}^n|x_{1i}-x_{2i}|^p)^{\frac{1}{p}} L(x1,x2)=(i=1∑n∣x1i−x2i∣p)p1
其中p趋于正无穷。
其实,上面三种计算方法可以进行一个统一。欧氏距离是 L ( x 1 , x 2 ) = ( ∑ i = 1 n ∣ x 1 i − x 2 i ∣ p ) 1 p L(x_1,x_2)=(\sum_{i=1}^n|x_{1i}-x_{2i}|^p)^{\frac{1}{p}} L(x1,x2)=(∑i=1n∣x1i−x2i∣p)p1中 p = 2 p=2 p=2的结果,曼哈顿距离是该式 p = 1 p=1 p=1的结果,而切比雪夫距离是 p = + ∞ p=+\infin p=+∞的结果
3)从中选取与未知类别样本距离最近的k个已知样本
如何选取k的值是一个学问。如果k值选取的太大容易造成欠拟合,如果k值选取的太小容造成过拟合
- 如果我们假设k为1(即为最近邻算法),此时的错误率(误分类可能性)比较高,因为很容易受到极个别特殊情况影响(如下图)。

上图中距离小黑点最近的是一个浅黄绿色的圆,但是很明显可以看出来,这个圆距离其它浅黄绿色圆比较远,是一种极端情况,所以其实这个小黑点大概率应该划给橙色圆
- 如果我们假设k为N,即根据所有点来判断,此时就是哪个圆数量多就归属于哪个圆,这显然也是不合理的,下图就是一个反例:
- 而当k值取在1和N中间的时候,随着k的变大,错误率会先下降后上升,会有一个极小值点作为最适合的k值。k到底取什么值,没有一个现成的算法可以告诉你,但是我们可以通过一些技巧和理解来缩小k值所取的范围。
- k一般取奇数(尤其是只有两种分类),这样可以避免两个类别占比相等的情况
- 一般k值都比较小,可以这么想:k值越大,说明需要考虑的距离小黑点更远的圆更多。而离小黑点较远的圆其实对小黑点的影响并不是很大,所以看k值不宜过大。
4)根据少数服从多数,进行“投票”
就是比较各类别的数目大小
5)确定未知分类样本归类为哪一类
KNN算法关键
(1)样本的所有特征都要做可比较的量化。
比如样本中存在非数值类型,则需要想办法将其转化为数值。例如样本中如果有颜色,则需要将颜色转化成灰度值进行比较。
(2)样本特征要做归一化处理
样本有多个参数,每一个参数都有自己的定义域和取值范围,为了“公平竞争”,所有特征的数值都采取归一化处置。
如下图:
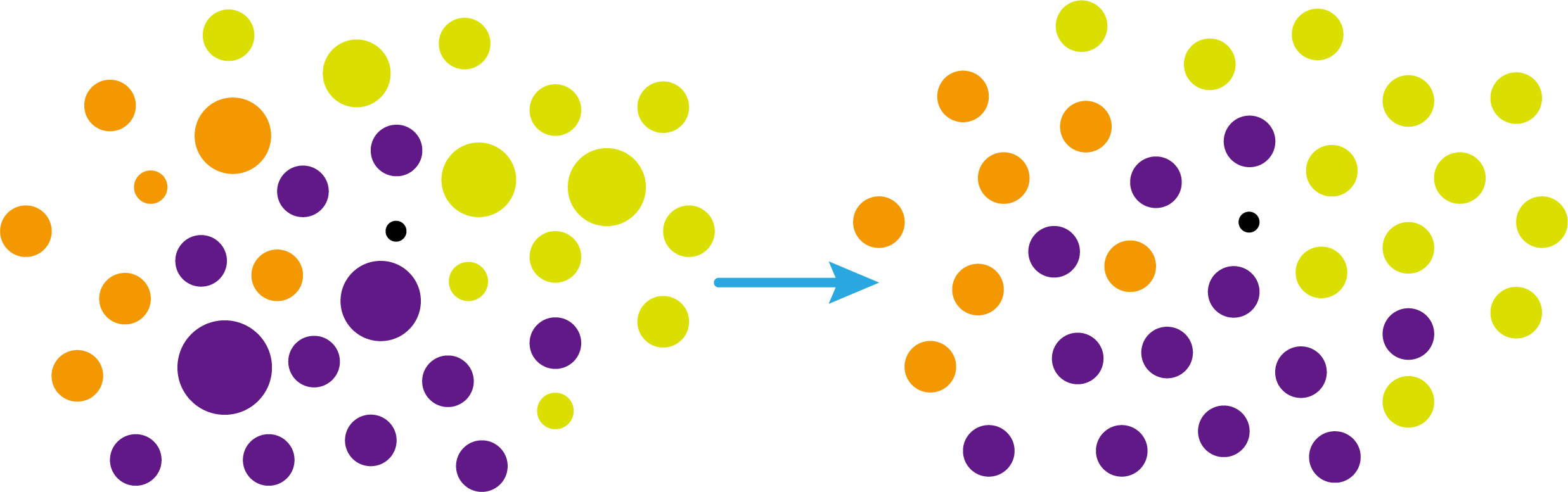
左图中的圆大小不一,就像每一个参数都有自己的定义域和取值范围,而为了避免这种影响需要进行统一,统一成右图。
(3)需要一个距离函数以计算两个样本之间的距离
通常使用的距离函数有:欧氏距离、余弦距离、汉明距离、曼哈顿距离等,一般选欧氏距离作为距离度量,但是这是只适用于连续变量。在文本分类这种非连续变量情况下,汉明距离可以用来作为度量。不同的度量方法适用于不同的样本。
KNN算法的优缺点
KNN算法的优点:
(1)简单,易于理解,易于实现,无需估计参数,无需训练;
这个很好理解,我在之前也介绍过,这称之为“惰性”
(2)适合对稀有事件进行分类;
(3)特别适合于多分类问题(multi-modal,对象具有多个类别标签)
KNN算法的缺点:
KNN算法在分类时有个主要的不足是,当样本不平衡时,如一个类的样本容量很大,而其他类样本容量很小时,有可能导致当输入一个新样本时,该样本的K个邻居中大容量类的样本占多数,如下图所示。

在该图中,虽然直观感觉小黑点应该属于橙色圆,但是如果画一个如上图的蓝色圈,蓝色大圈内的浅黄绿色圆的数量要多于橙色圆的数量。
改进方法:
可以采用权值的方法(该样本距离小的邻居权值大)来改进。
KNN算法优化——kd树
前面说到,KNN算法需要测量待分类点(小黑点)和每一个已分类点(各种颜色的圆)的距离,并进行排序,选出其中k个距离最近的圆,再进行投票。这个算法在理解上十分简单,但是,如果当数据集十分大的时候,比如有100万个数据点,此时每个数据点还有几十个特征,那么计算起来将会十分复杂。那么有没有一种方式可以减少这样的计算量呢?
答案是肯定的。
这时候,人们结合数据结构中的二叉树,提出了一种算法——kd树(k-dimensional tree)
kd树可以帮助我们很快地找到与测试点最相邻的k个训练点,而不需要计算每个待分类点与已知分类点的距离。为了方便理解,我们还是举一个例子来说明。
kd树的构造
例子引入
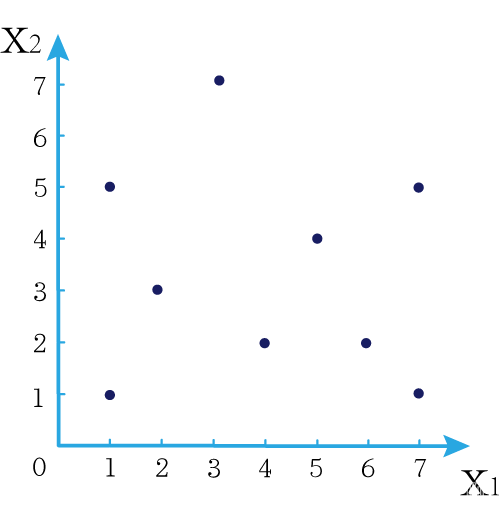
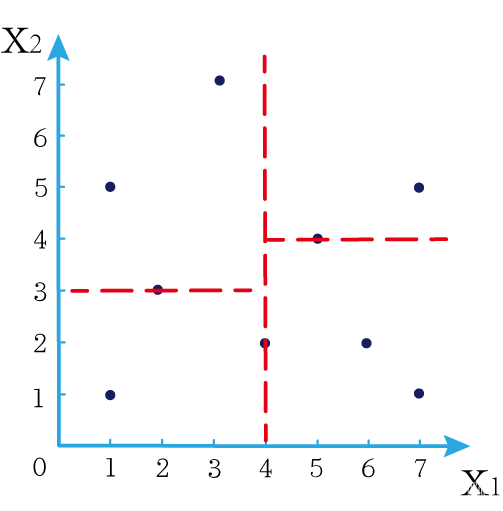
现在我们有以下二维数据点: ( 1 , 1 ) , ( 1 , 5 ) , ( 2 , 3 ) , ( 3 , 7 ) , ( 4 , 2 ) , ( 5 , 4 ) , ( 6 , 2 ) , ( 7 , 1 ) , ( 7 , 5 ) (1,1),(1,5),(2,3),(3,7),(4,2),(5,4),(6,2),(7,1),(7,5) (1,1),(1,5),(2,3),(3,7),(4,2),(5,4),(6,2),(7,1),(7,5),我们要利用这些数据点构造一棵kd树。
第一步我们根据所有点的 x 1 x_1 x1找到中位数,上图中对应的中位数是4,所以该中位数对应的那个点是 ( 4 , 2 ) (4,2) (4,2)。我们经过 ( 4 , 2 ) (4,2) (4,2)画一条垂直于 x 1 x_1 x1轴的竖线,那么此时这条竖线(红色虚线)将所有数据点分成左右两个部分。
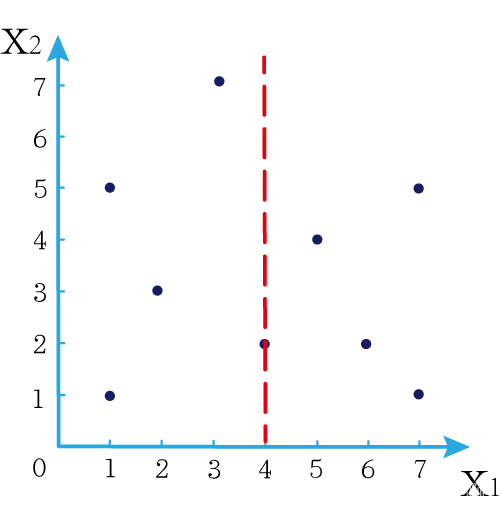
下面我们分别对左右的数据点重复上述操作,但是需要注意的是,此时是根据所有点的 x 2 x_2 x2来计算中位数,所画的线应该垂直于 x 2 x_2 x2轴。
注意对于这个情况来说,左边四个点无法找到中位数,此时我们只要选取处于中间两个数的任意一点即可
按上述操作继续划分,直到分割的小区域内只剩下一个点或者没有点。
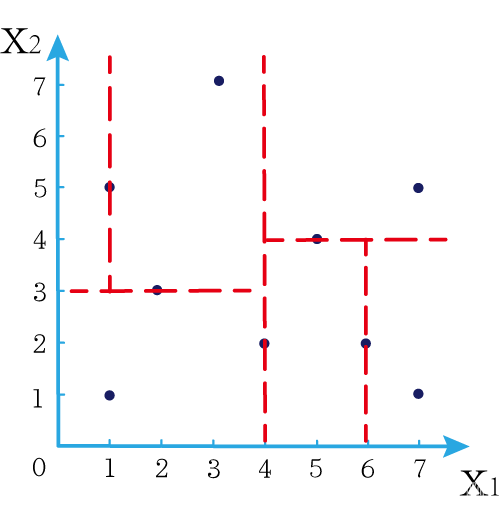
这样我们就完成了一个kd树的划分。
那为什么说这是一颗“树”呢?
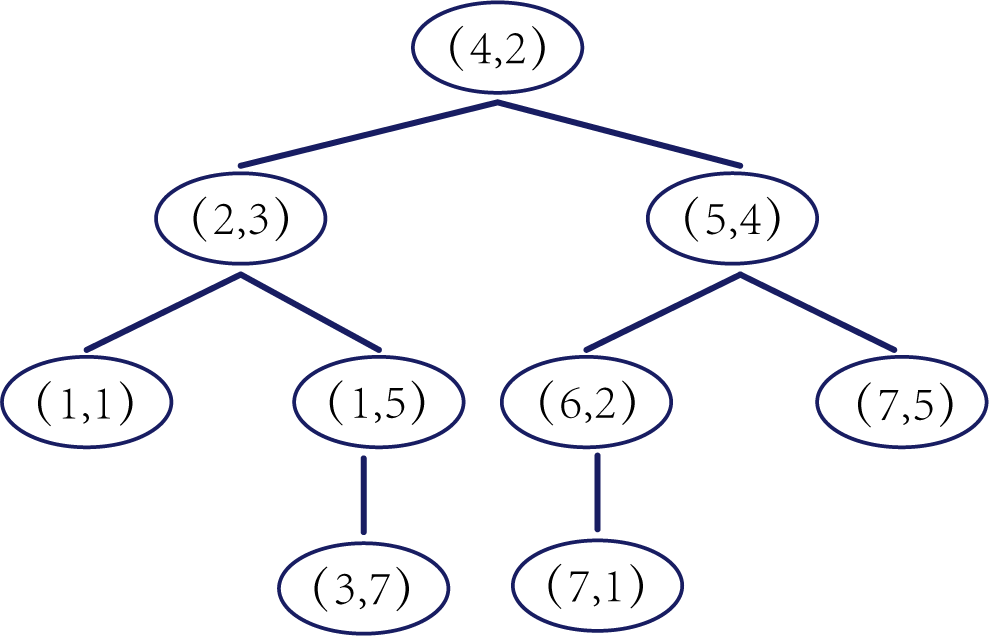
实际上,随着我们的划分过程,我们会不断的构造一棵二叉树。我们先经过 ( 4 , 2 ) (4,2) (4,2)划了一条竖线,那么我们将 ( 4 , 2 ) (4,2) (4,2)纳入根结点。之后我们划竖线经过了 ( 2 , 3 ) (2,3) (2,3) ( 5 , 4 ) (5,4) (5,4)这两个点,那我们将其分别作为左结点和右结点.
注意:左结点和右结点的划分是有条件的。
对于 ( 4 , 2 ) (4,2) (4,2)来说,我们是根据 x 1 x_1 x1的值划分了数据点,那么左结点 x 1 x_1 x1坐标比根结点小,比如2<4;右结点 x 1 x_1 x1坐标比根结点大,比如 5 > 4 5>4 5>4。而对于 ( 2 , 3 ) (2,3) (2,3)来说,由于我们是根据 x 2 x_2 x2轴划分的数据点,那么左结点 x 2 x_2 x2坐标比根结点小,右结点 x 2 x_2 x2坐标比根结点大。
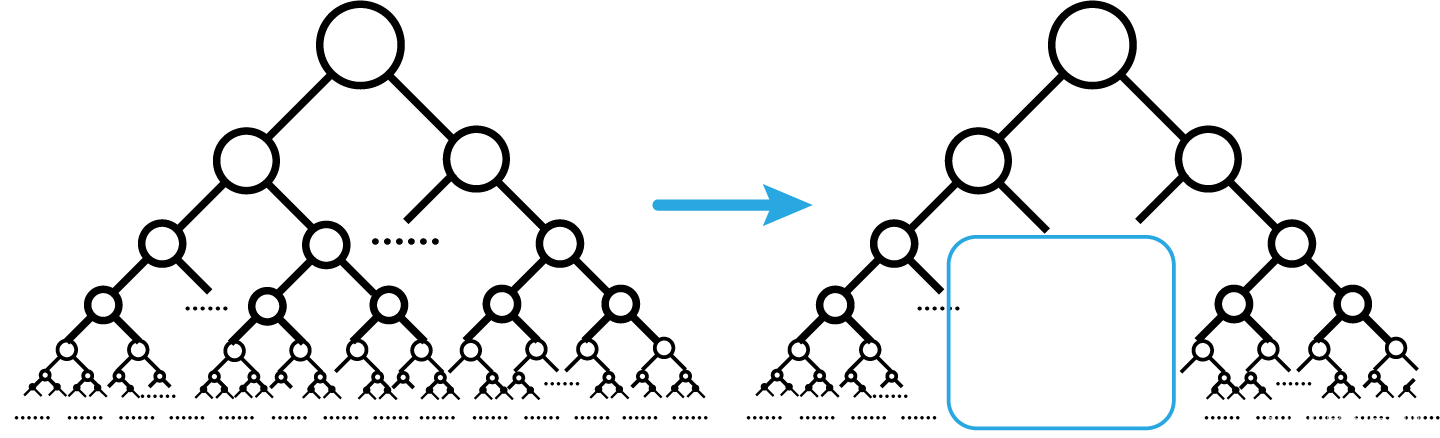
以此类推。如果没有划竖线,那么我们就将其作为空结点。所以我们能得到一个如下图的二叉树。
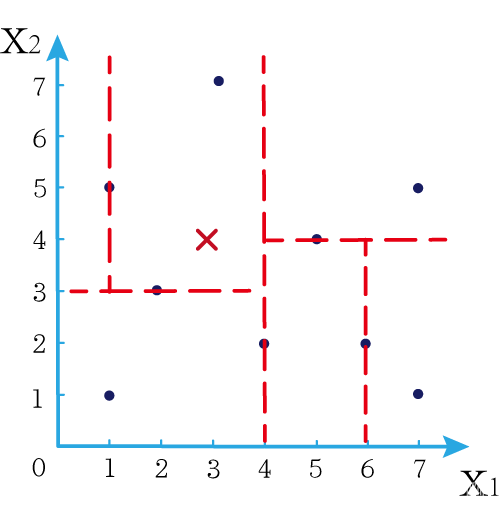
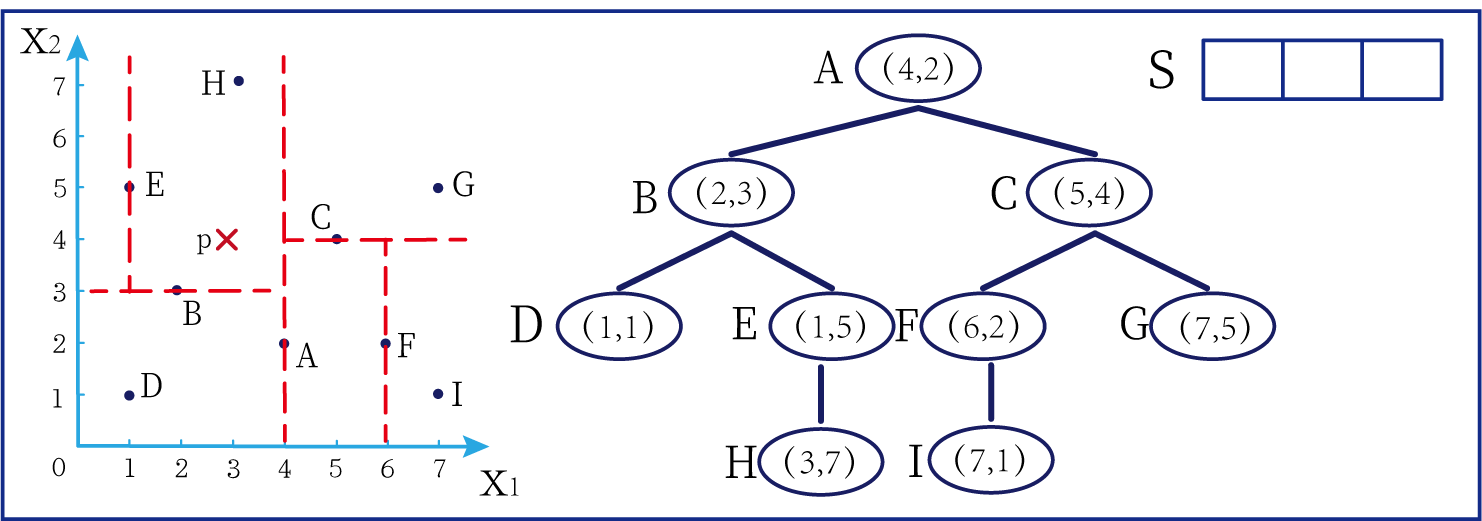
下面我们就需要利用kd树完成k近邻搜索。假设现在我们有一个点 ( 3 , 4 ) (3,4) (3,4),我们要去寻找这个点的最近邻点。
寻找最近邻点的过程其实是一个搜寻二叉树的过程。我们还可以在坐标轴上进行直观的理解。
为了方便,我将所有点依次命名为A~E,将待分类的点命名为p,将k近邻点存放在S中,S功能存放k个数据点(我们这里设k=3)。
算法描述
- 选取 x 1 x_1 x1为坐标轴,以训练集中的所有数据 x 1 x_1 x1坐标中的中位数作为切分点,将超矩形区域切割成两个子区域。将该切分点作为根结点,由根结点生出深度为1的左右子结点,左节点对应 x 1 x_1 x1坐标小于切分点,右结点对应坐标大于切分点
- 对深度为j的结点,选择 x i x_i xi为切分坐标轴,其中 i = j ( m o d k ) + 1 i=j(modk)+1 i=j(modk)+1,以该结点区域中训练数据 x i x_i xi坐标的中位数作为切分点,将区域分为两个子区域,且生成深度为j+1的左、右子结点。左节点对应 x i x_i xi坐标小于切分点,右结点对应 x i x_i xi坐标大于切分点
- 重复2,直到两个子区域没有数据或者只有一个数据时停止。
kd树的搜索
例子引入
下面开始kd树搜索。
- 第一步:
- 首先我们将 ( 3 , 4 ) (3,4) (3,4)与根结点 ( 4 , 2 ) (4,2) (4,2)进行比较。由于之前是垂直于 x 1 x_1 x1的轴经过 ( 4 , 2 ) (4,2) (4,2),所以去比较两个点的 x 1 x_1 x1坐标。由于 3 < 4 3<4 3<4,所以我们往根结点的左结点进行搜寻(因为我们在之前构造kd树的时候规定了左结点小而右结点大)。
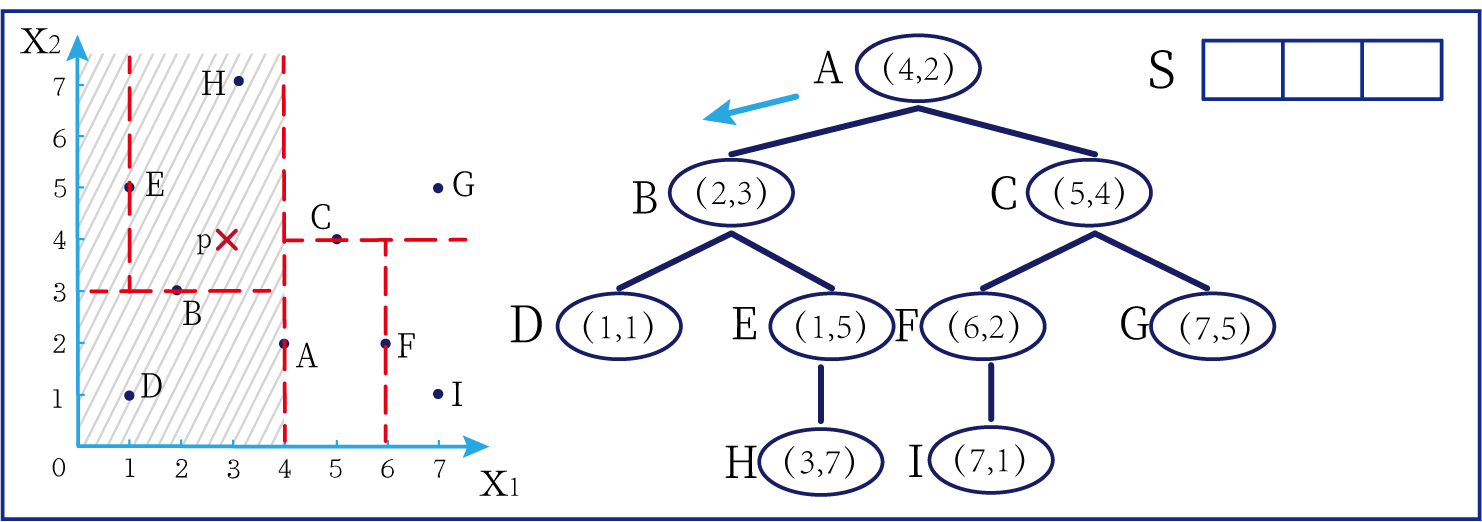
在上图中左边坐标轴中对应的是左边阴影部分的区域,接下来的搜索要在阴影部分进行
- 第二步:
- 接下来需要将 ( 3 , 4 ) (3,4) (3,4)的 x 2 x_2 x2与左子树的根结点 ( 2 , 3 ) (2,3) (2,3)的 x 2 x_2 x2坐标进行比较,由于 4 > 3 4>3 4>3,所以要往右搜索
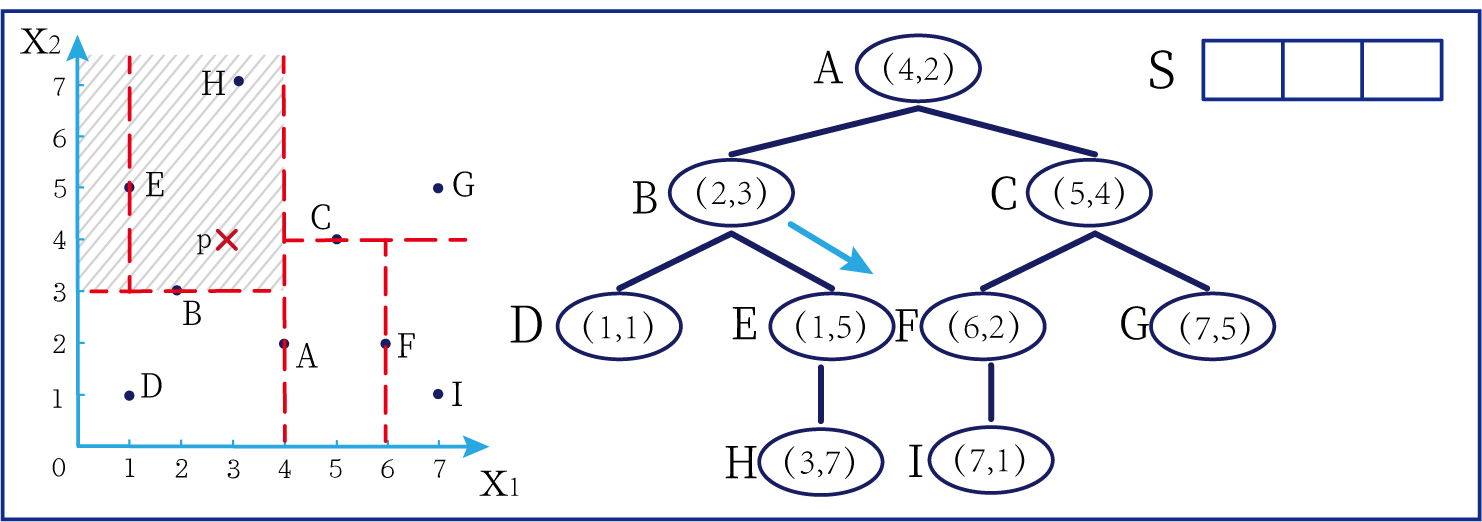
在上图中左边坐标轴中对应的是左上角阴影部分的区域,接下来的搜索要在阴影部分进行。
- 第三步:
- 由于E结点只有一个子结点,所以经过E结点时无需比较坐标大小可以直接搜索到H结点。由于H点是叶子结点,接下来无法继续这个分支的遍历,所以我们标记一下H结点,说明我们已经访问过这里且不需要再次进行访问。此时我们发现,S里是空的,我们可以暂且将H点存入S中,作为一个k邻近点(但是不代表这个点就是邻近点,后续会进行替换操作)
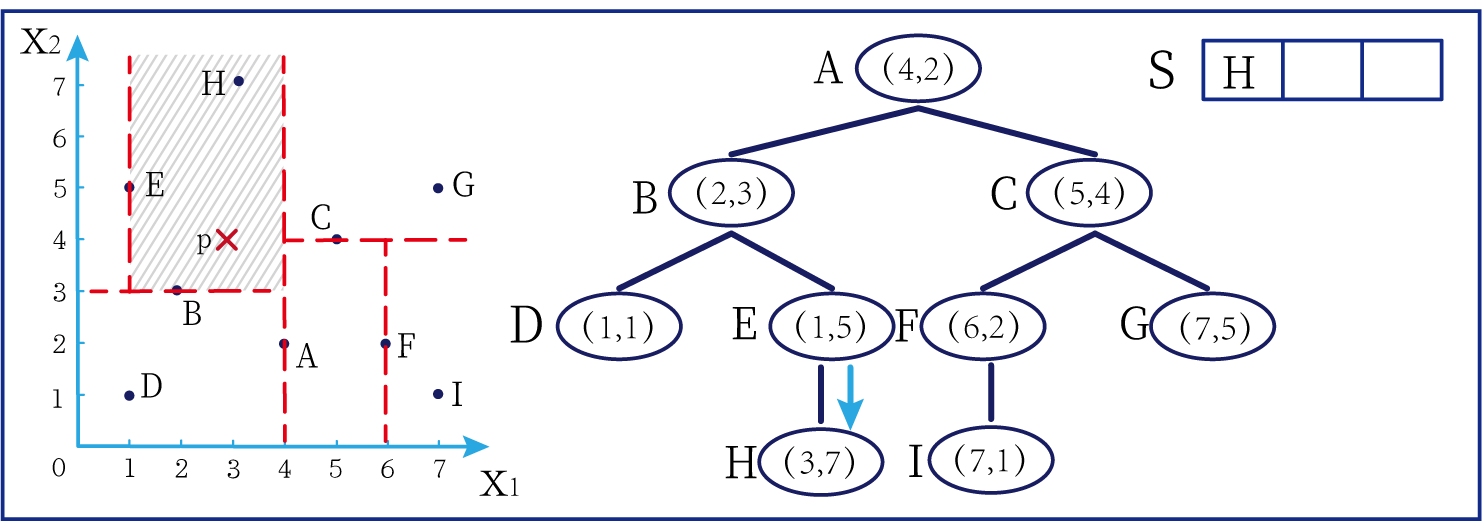
在上图中左边坐标轴中对应的是左上角阴影部分的区域,接下来的搜索要在阴影部分进行。此外,S中存入了H结点
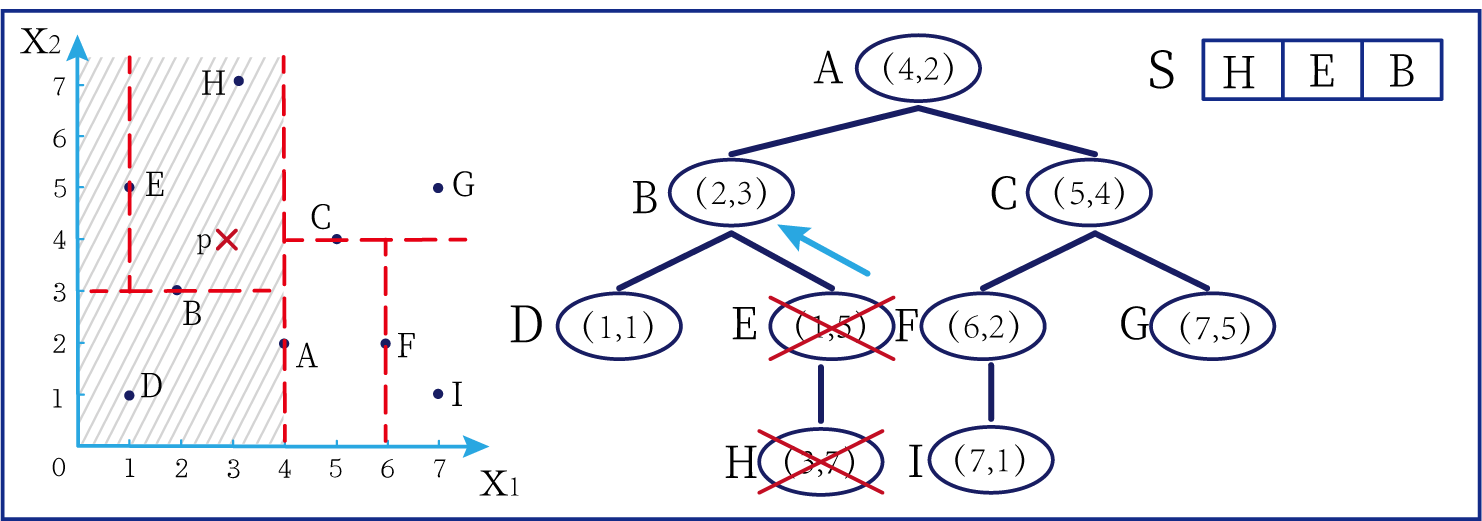
- 第四步:
- 由于H点是叶结点,无法继续进行访问,所以要退回上一个结点C。因为C只有一个分支,所以这条分支已经搜索过了,我们便可以标记一下结点E,并将E结点存入S中。

在上图中左边坐标轴中对应的是左上角阴影部分的区域,阴影区域扩大,说明接下来要扩大搜索范围搜索尚未搜索过的区域。此外,S中存入了E结点;H结点从kd树上划去,之后不再进行搜索。
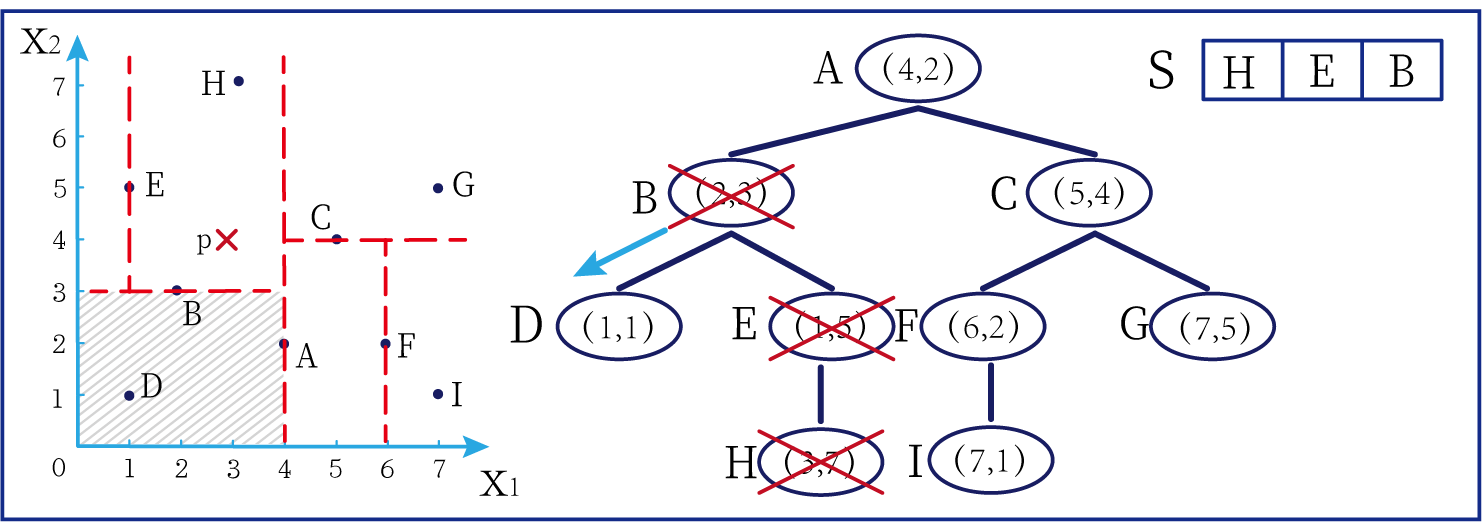
- 第五步:
- 由于E结点没有别的分支了,所以继续退回到上一个结点B。将结点B进行标记,并加入到S中。
在上图中左边坐标轴中对应的是左上角阴影部分的区域,阴影区域扩大,说明接下来要扩大搜索范围搜索尚未搜索过的区域。此外,S中存入了B结点;E结点从kd树上划去,之后不再进行搜索。
- 第六步:
- 下面计算p点与B点的切分线距离。由于 P B ^ = ∣ 4 − 3 ∣ = 1 P\hat{B}=|4-3|=1 PB^=∣4−3∣=1,这个值小于p点到S中H、E、B三点距离的最大距离,所以此时需要从结点B另一子结点D进行搜索。
下面解释一下为什么要计算切分线距离(点到直线的距离):
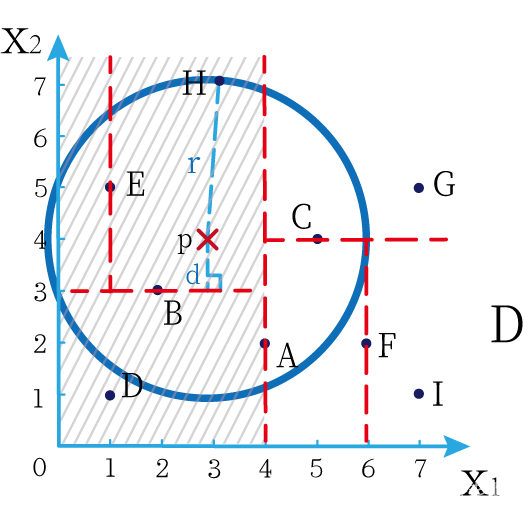
如上图,S中距离p点最远的一个结点是H点,以p为圆心,pH为半径画一个圆。记此时p到B的切分线距离为d。根据直线与圆的位置关系,当 d < r d<r d<r的时候,平行于 x 1 x_1 x1轴且过B点的直线与圆相割。这说明圆的一部分在B点下方,而B点下方也有可能有点在圆内,所以要去B点下方去搜索。而这种搜索对应在kd树中就是搜索B结点的另外一个分支。
- 第七步:
- 重复第二步的步骤,对结点D进行搜索。由于结点D是叶结点,无法再继续搜索,所以我们计算pD的距离 p D = ( 3 − 1 ) 2 + ( 4 − 1 2 ) = 13 pD=\sqrt{(3-1)^2+(4-1^2)}=\sqrt{13} pD=(3−1)2+(4−12)=13,将其与S中的距离比较。由于 p D = 13 > 3 = p H > p E > p B pD=\sqrt{13}>3=pH>pE>pB pD=13>3=pH>pE>pB,所以不将D替换S中的点(即D点不可能是k近邻点)。
在上图中左边坐标轴中对应的是左下角阴影部分的区域,这是接下来要搜索的区域。
- 第八步:
- 标记点D为已访问结点,并退回上一结点进行搜索。发现结点B已被标记过,于是继续退回上一结点。此时重复第六步的操作,计算p点到A结点的切分线距离 p A = 1 pA=1 pA=1,小于 p H 、 p E 、 p B pH、pE、pB pH、pE、pB的距离所以仍然需要搜索根结点A的另外一个分支。

- 第九步:
- 标记A为已访问结点,并将 p A pA pA的距离与S中的进行比较,发现 p A < p H pA<pH pA<pH,于是将A替换掉H。重复之前的步骤继续进行访问,最终得到如下结果:
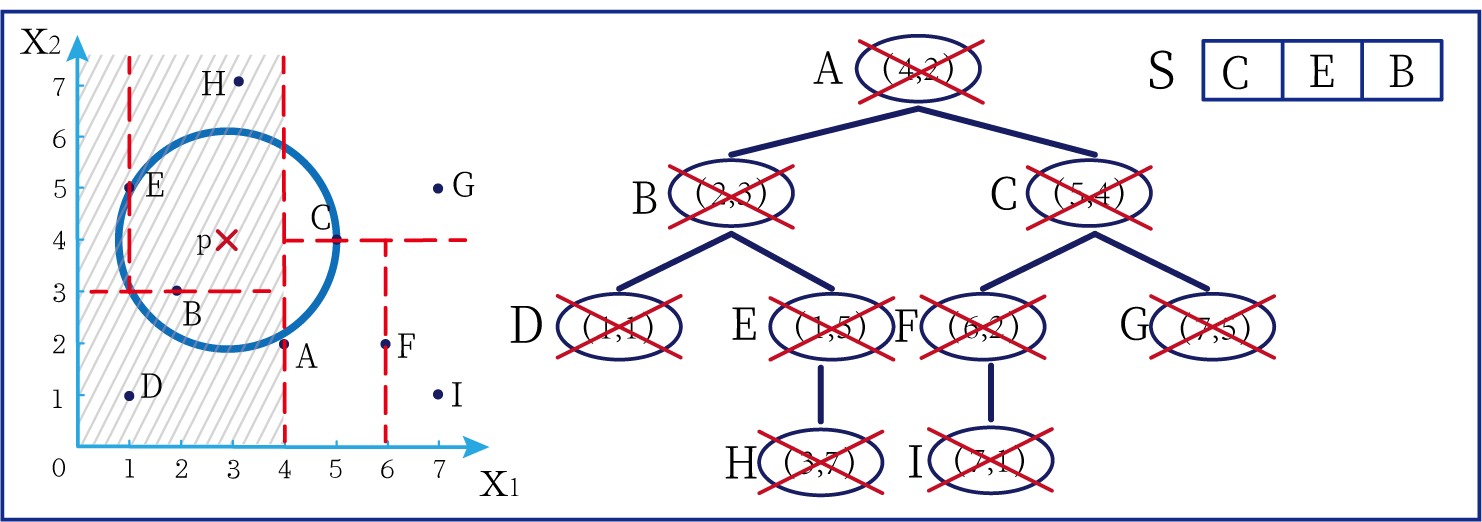
介于此题情况特殊, p E = p A pE=pA pE=pA,任意选一个可能会影响到最终的分类结果,但是在实际情况中,这种情况发生概率较小,如果发生,可能要重新设置k值再次进行搜索。
这样我们就完成了kd树的建立与搜索得到k个近邻点。
或许你并没有觉得这种方法简化了计算,但事实上,对于一个巨大的数据集,如果能够少遍历一棵子树,将会带来巨大的简便,只不过,这种情况是有概率性出现的。
如上图,如果通过kd树算法能够删去一条子树,那么其子树下面的结点都无需遍历。而这种遍历性来自于第六步的操作,即通过比较切分线大小来判断是否需要遍历子树。
算法描述
-
根据p的坐标和kd树的结点向下进行搜索。如果p的坐标小于c,则走左子结点,否则走右子结点 【第一步】
-
到达叶子结点时,将其标记为已访问。如果S中不足k个点,则将该结点加入到S中**【第三步】**;如果S不空且当前结点与p点的距离小于S中最长的距离,则用当前结点替换S中离p最远的点
-
如果当前结点不是根节点,执行(a);否则,结束算法
(a)回退到当前结点的父结点,此时的结点为当前结点(回退之后的结点)。将当前结点标记为已访问,执行(b)和(c)【第四步】;如果当前结点已经被访过,再次执行(a)。
(b)如果此时S中不足k个点,则将当前结点加入到S中 【第五步】;如果S中已有k个点,且当前结点与p点的距离小于S中最长距离,则用当前结点替换S中距离最远的点。
(c)计算p点和当前结点切分线的距离。如果该距离大于等于S中距离p最远的距离并且S中已有k个点,执行3 【第七步】;如果该距离小于S中最远的距离或S中没有k个点,从当前结点的另一子节点开始执行1 【第八步】;如果当前结点没有另一子结点,执行3。