这个方法可以理解为:“两个向量之间的夹角(有符号的)”。
我会将它想象成:将两个向量都放在坐标原点,一个向量要向哪个方向旋转多少度 才能与另一个向量重合。
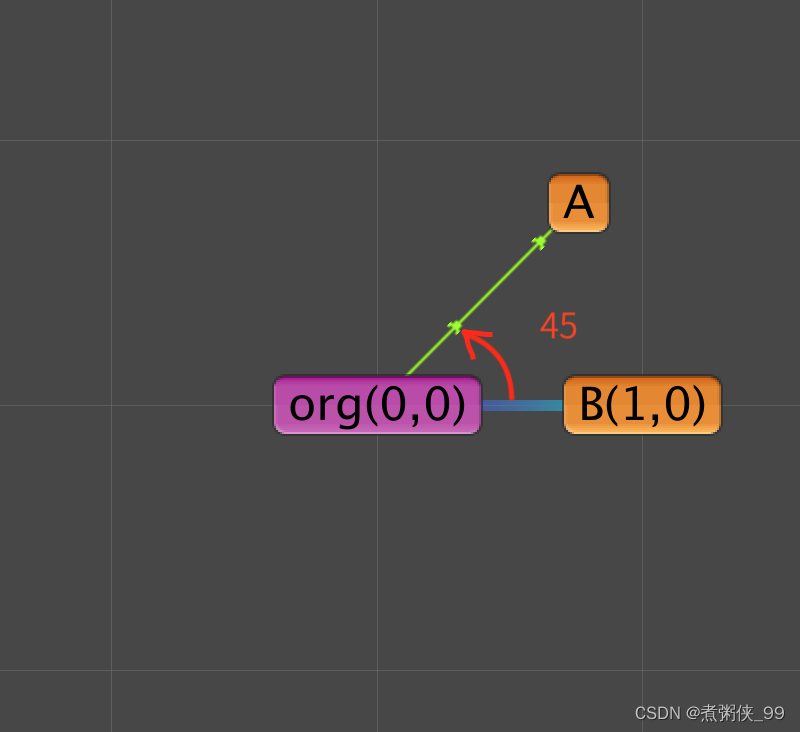
于是我在坐标原点放置了两个向量:OB和OA。
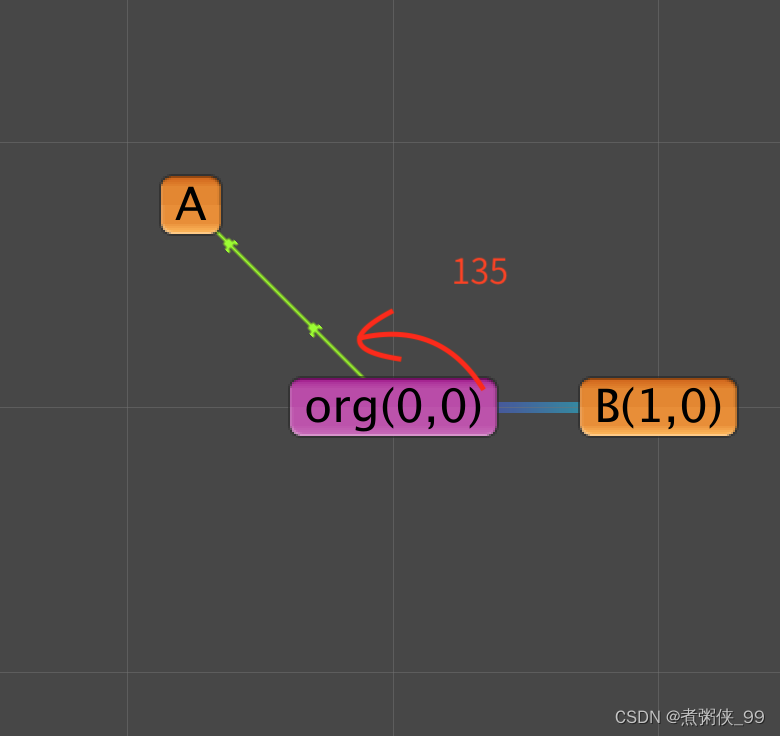
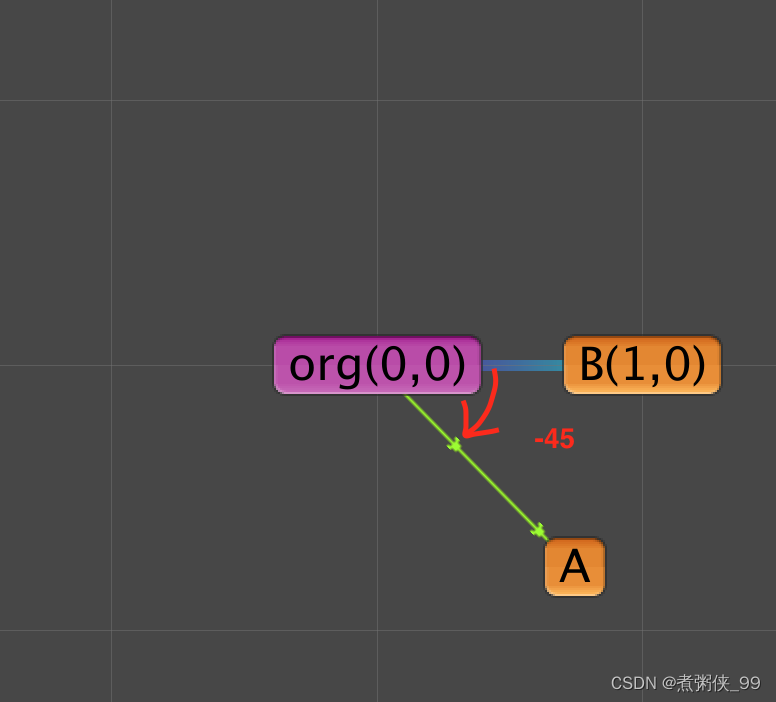
OB始终躺在X轴正方向,看看OA在4个象限的不同的情况下,OB到OA会返回什么值。
向量OB ———>向量OA,旋转轴为:Z轴正方向
float signedAngle = Vector3.SignedAngle ( OB, OA, Vector3.forward );
-
测试得到的结果记录:
得到的SignedAngle :
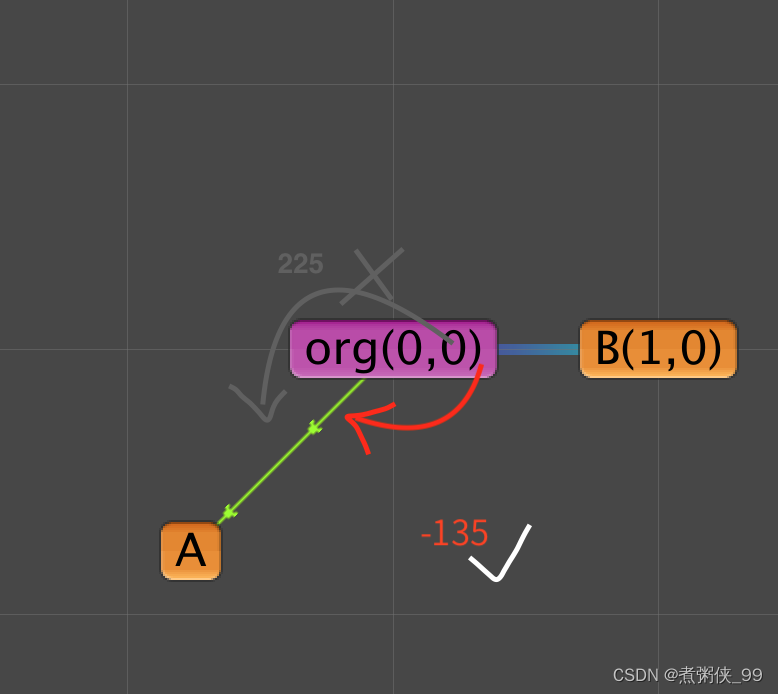
从图三可以看出,结果并未返回225 ,而是 -135。——“ 返回两个可能角度中的较小者 ”
换而言之,结果永远在 (-180度 ,180度) 之间。
-
关于符号
下图分别测试了OA到OB、OB到OA的结果:
-135,135
(一个思考:为什么OB到OA是逆时针旋转,结果为正? 大概因为旋转轴我传入了Vector3.forward 也就是z轴正方向 + Unity左手坐标系 (我猜)

而 Vector2 的此方法,不需要传入旋转轴,只需要from和to的两个向量。得到的结果与此方法的 Vector3 版本相同(传入z轴正方向)。
angle = Vector3.SignedAngle(Vector3.right, Vector3.up, Vector3.forward);
Debug.Log("Vector3 OB -> OA :" + angle.ToString()); //输出 90
angle = Vector2.SignedAngle(Vector2.right, Vector2.up);
Debug.Log("Vector2 OB -> OA :" + angle.ToString()); //输出90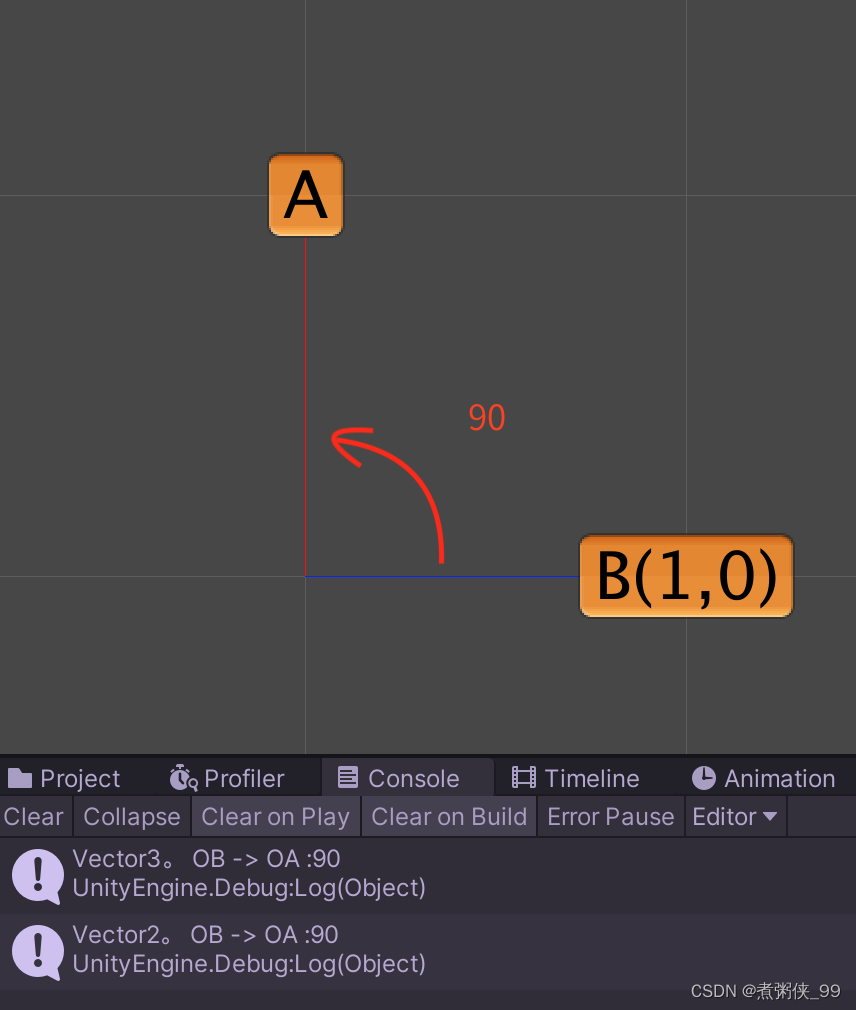
-
补充:官方文档的说明
public static float SignedAngle (Vector3 from, Vector3 to, Vector3 axis);
| from | 测量角度差的源向量。 |
| to | 测量角度差的目标向量。 |
| axis | 一个向量,其他向量将绕其旋转。 |
返回
from与to之间的有符号角度(以度为单位)。返回两个向量之间的两个可能角度中的较小者,因此结果永远不会大于 180 度或小于 -180 度。 如果将 from 和 to 向量想象成一张纸上的线条,两者都源自同一点,则
axis向量将指向纸外方向。 两个向量之间测量的角度在顺时针方向上为正,在逆时针方向上为负。