【ROS学习笔记8】通信机制实操
写在前面,本系列笔记参考的是AutoLabor的教程,具体项目地址在 这里
前言
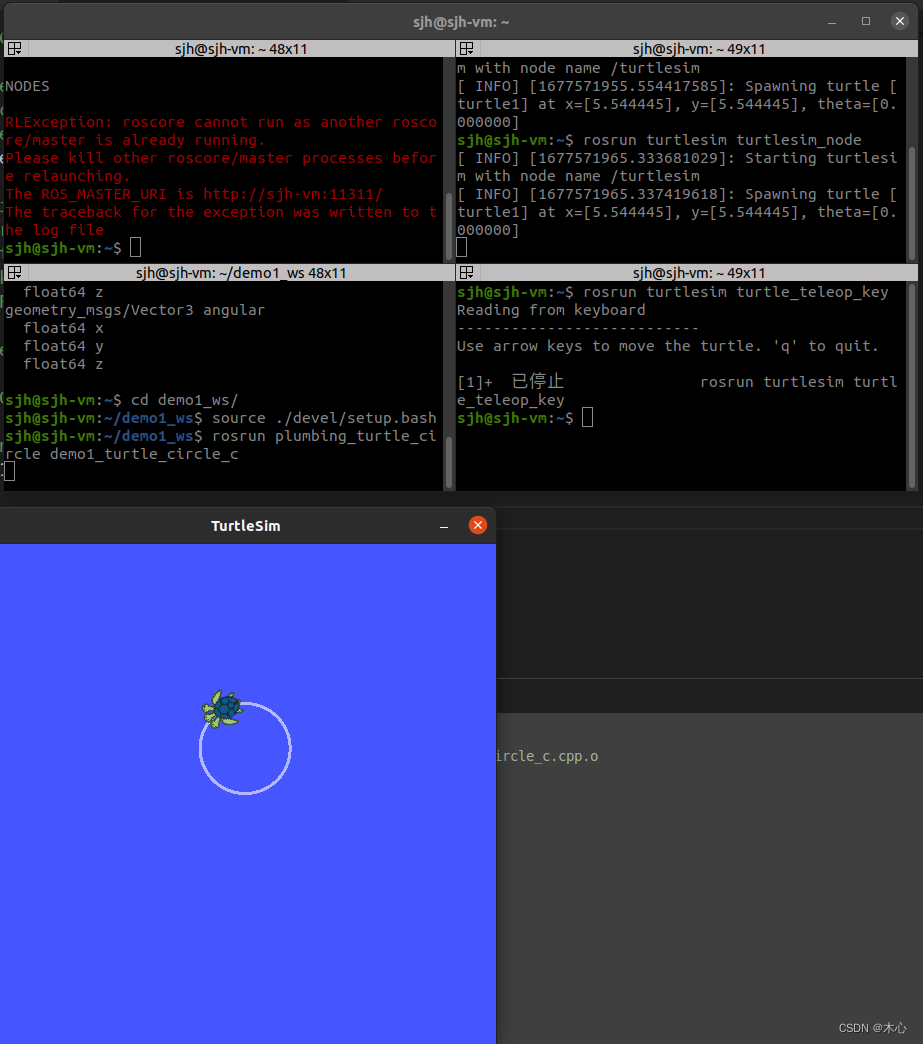
通过编码实现乌龟运动控制,让小乌龟做圆周运动,如下所示:
一、话题发布
需求描述: 编码实现乌龟运动控制,让小乌龟做圆周运动。
实现分析:
- 乌龟运动控制实现,关键节点有两个,一个是乌龟运动显示节点 turtlesim_node,另一个是控制节点,二者是订阅发布模式实现通信的,乌龟运动显示节点直接调用即可,运动控制节点之前是使用的 turtle_teleop_key通过键盘 控制,现在需要自定义控制节点。
- 控制节点自实现时,首先需要了解控制节点与显示节点通信使用的话题与消息,可以使用ros命令结合计算图来获取。
- 了解了话题与消息之后,通过 C++ 或 Python 编写运动控制节点,通过指定的话题,按照一定的逻辑发布消息即可。
实现流程:
- 通过计算图结合ros命令获取话题与消息信息。
- 编码实现运动控制节点。
- 启动 roscore、turtlesim_node 以及自定义的控制节点,查看运行结果。
0、乌龟控制demo
分别再终端输入
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
1、话题与消息的获取
准备:先启动键盘控制乌龟运动案例

通过rostopic list列出话题,获取话题:/turtle1/cmd_vel
rostopic list
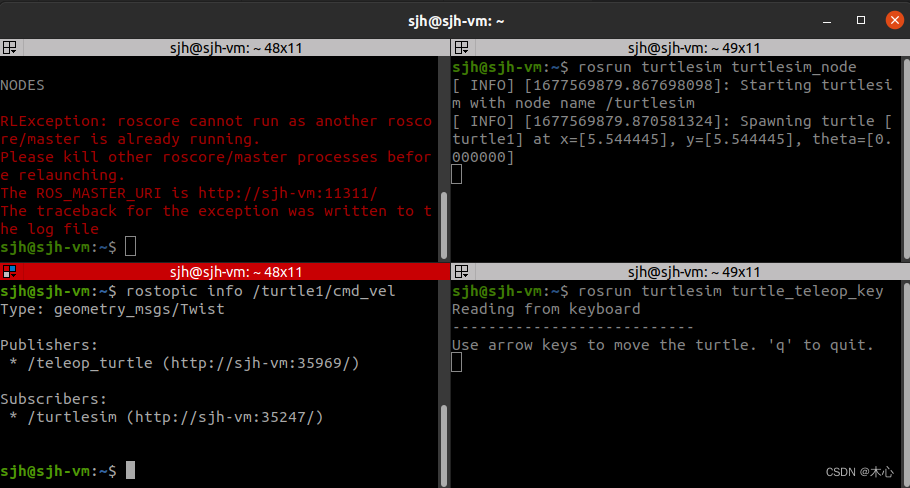
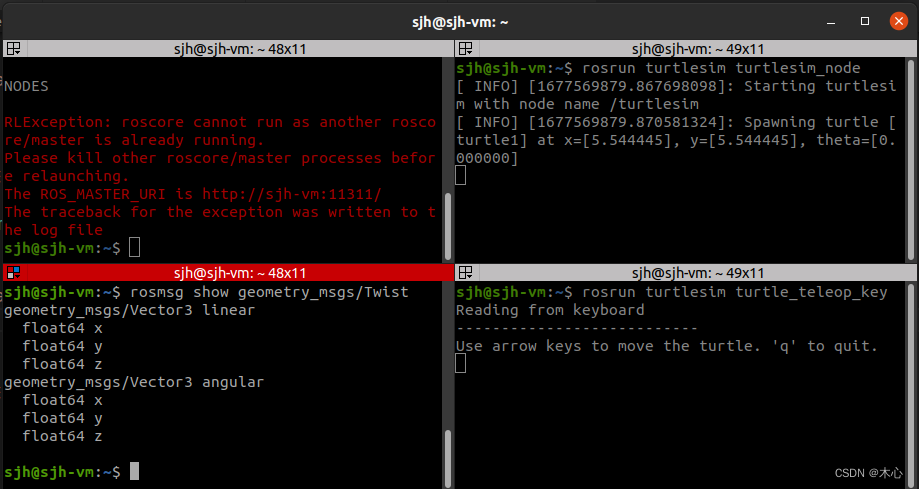
再进行消息获取,获取消息类型:geometry_msgs/Twist
rostopic info /turtle1/cmd_vel
结果如下:
2、实现发布节点
Cpp的实现方案
/*
编写 ROS 节点,控制小乌龟画圆
准备工作:
1.获取topic(已知: /turtle1/cmd_vel)
2.获取消息类型(已知: geometry_msgs/Twist)
3.运行前,注意先启动 turtlesim_node 节点
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建发布者对象
4.循环发布运动控制消息
*/
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"control");
ros::NodeHandle nh;
// 3.创建发布者对象
ros::Publisher pub = nh.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",1000);
// 4.循环发布运动控制消息
//4-1.组织消息
geometry_msgs::Twist msg;
msg.linear.x = 1.0;
msg.linear.y = 0.0;
msg.linear.z = 0.0;
msg.angular.x = 0.0;
msg.angular.y = 0.0;
msg.angular.z = 2.0;
//4-2.设置发送频率
ros::Rate r(10);
//4-3.循环发送
while (ros::ok())
{
pub.publish(msg);
ros::spinOnce();
}
return 0;
}
Python的实现方案
#! /usr/bin/env python
"""
编写 ROS 节点,控制小乌龟画圆
准备工作:
1.获取topic(已知: /turtle1/cmd_vel)
2.获取消息类型(已知: geometry_msgs/Twist)
3.运行前,注意先启动 turtlesim_node 节点
实现流程:
1.导包
2.初始化 ROS 节点
3.创建发布者对象
4.循环发布运动控制消息
"""
import rospy
from geometry_msgs.msg import Twist
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("control_circle_p")
# 3.创建发布者对象
pub = rospy.Publisher("/turtle1/cmd_vel",Twist,queue_size=1000)
# 4.循环发布运动控制消息
rate = rospy.Rate(10)
msg = Twist()
msg.linear.x = 1.0
msg.linear.y = 0.0
msg.linear.z = 0.0
msg.angular.x = 0.0
msg.angular.y = 0.0
msg.angular.z = 0.5
while not rospy.is_shutdown():
pub.publish(msg)
rate.sleep()
3、运行
- 启动roscore
- 启动乌龟显示节点
- 执行运动控制节点
二、话题订阅
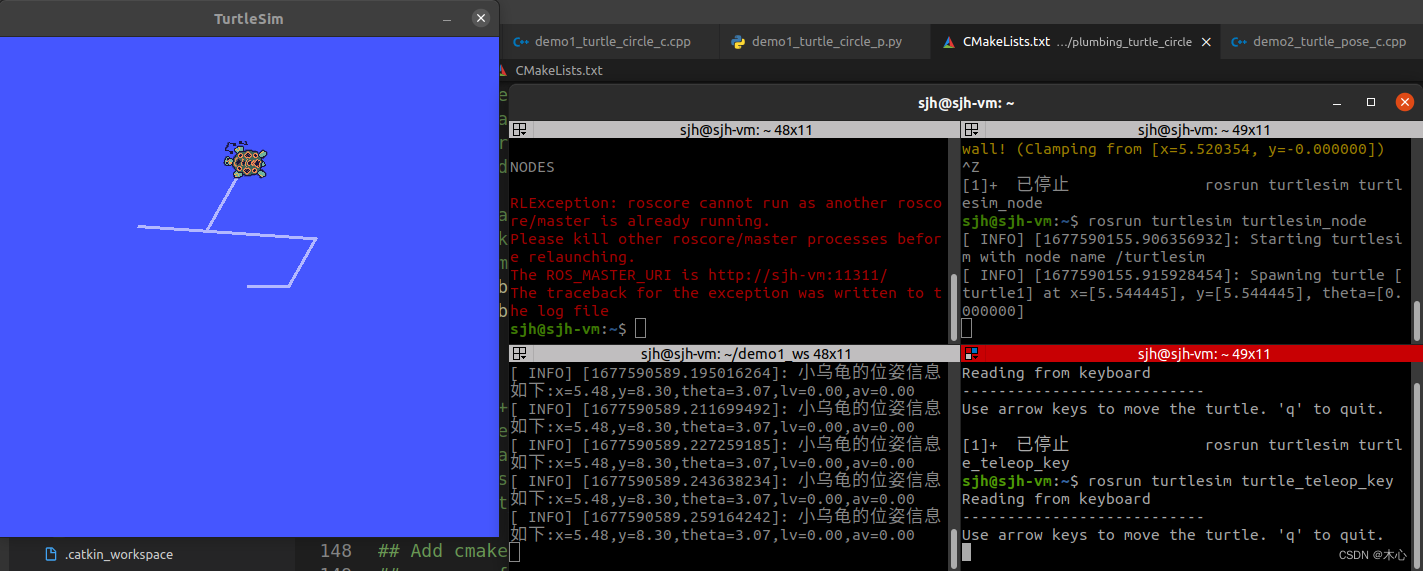
需求描述: 已知turtlesim中的乌龟显示节点,会发布当前乌龟的位姿(窗体中乌龟的坐标以及朝向),要求控制乌龟运动,并时时打印当前乌龟的位姿。
效果如下:
实现分析:
- 首先,需要启动乌龟显示以及运动控制节点并控制乌龟运动。
- 要通过ROS命令,来获取乌龟位姿发布的话题以及消息。
- 编写订阅节点,订阅并打印乌龟的位姿。
实现流程:
- 通过ros命令获取话题与消息信息。
- 编码实现位姿获取节点。
- 启动 roscore、turtlesim_node 、控制节点以及位姿订阅节点,控制乌龟运动并输出乌龟的位姿。
1、话题与消息的获取
获取话题:/turtle1/pose
rostopic list
获取消息类型:turtlesim/Pose
rostopic type /turtle1/pose
获取消息格式:
rosmsg info turtlesim/Pose
响应结果:
float32 x
float32 y
float32 theta
float32 linear_velocity
float32 angular_velocity
2、实现订阅节点
创建功能包需要依赖的功能包: roscpp rospy std_msgs turtlesim
Cpp实现:
/*
订阅小乌龟的位姿: 时时获取小乌龟在窗体中的坐标并打印
准备工作:
1.获取话题名称 /turtle1/pose
2.获取消息类型 turtlesim/Pose
3.运行前启动 turtlesim_node 与 turtle_teleop_key 节点
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建 ROS 句柄
4.创建订阅者对象
5.回调函数处理订阅的数据
6.spin
*/
#include "ros/ros.h"
#include "turtlesim/Pose.h"
void doPose(const turtlesim::Pose::ConstPtr& p){
ROS_INFO("乌龟位姿信息:x=%.2f,y=%.2f,theta=%.2f,lv=%.2f,av=%.2f",
p->x,p->y,p->theta,p->linear_velocity,p->angular_velocity
);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"sub_pose");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建订阅者对象
ros::Subscriber sub = nh.subscribe<turtlesim::Pose>("/turtle1/pose",1000,doPose);
// 5.回调函数处理订阅的数据
// 6.spin
ros::spin();
return 0;
}
Python的实现:
#! /usr/bin/env python
"""
订阅小乌龟的位姿: 时时获取小乌龟在窗体中的坐标并打印
准备工作:
1.获取话题名称 /turtle1/pose
2.获取消息类型 turtlesim/Pose
3.运行前启动 turtlesim_node 与 turtle_teleop_key 节点
实现流程:
1.导包
2.初始化 ROS 节点
3.创建订阅者对象
4.回调函数处理订阅的数据
5.spin
"""
import rospy
from turtlesim.msg import Pose
def doPose(data):
rospy.loginfo("乌龟坐标:x=%.2f, y=%.2f,theta=%.2f",data.x,data.y,data.theta)
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("sub_pose_p")
# 3.创建订阅者对象
sub = rospy.Subscriber("/turtle1/pose",Pose,doPose,queue_size=1000)
# 4.回调函数处理订阅的数据
# 5.spin
rospy.spin()
3.运行
首先,启动 roscore;
然后启动乌龟显示节点,执行运动控制节点;
最后启动乌龟位姿订阅节点;
最终执行结果与演示结果类似。
三、服务调用
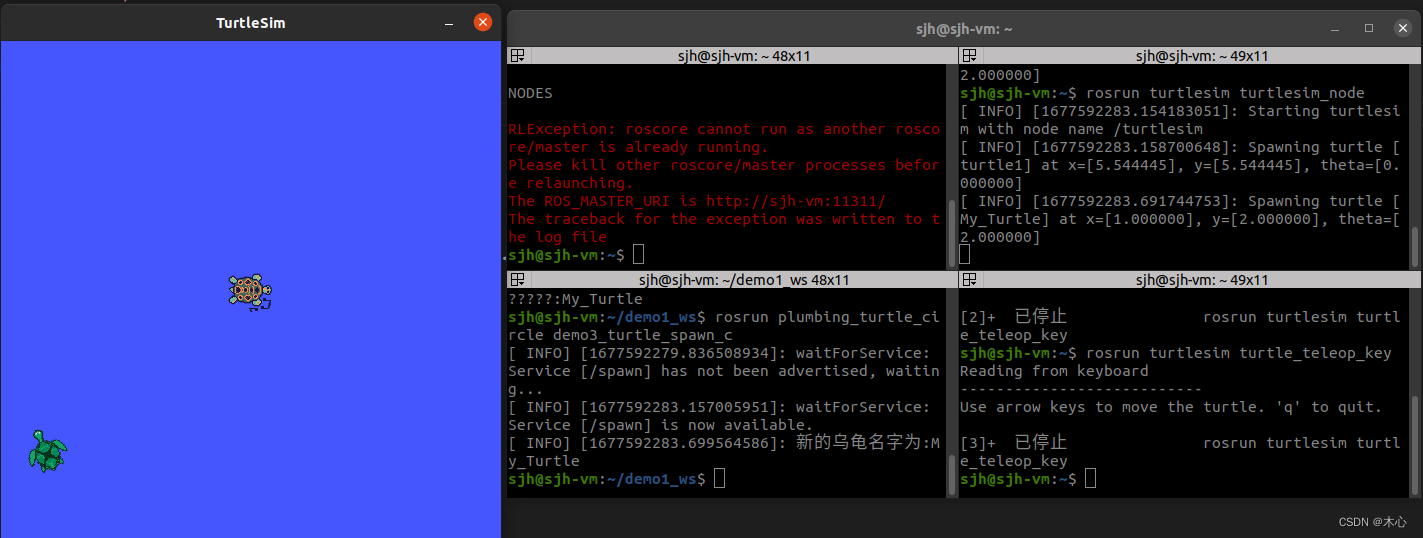
**需求描述: **编码实现向 turtlesim 发送请求,在乌龟显示节点的窗体指定位置生成一乌龟,这是一个服务请求操作。
效果如下:
实现分析:
- 首先,需要启动乌龟显示节点。
- 要通过ROS命令,来获取乌龟生成服务的服务名称以及服务消息类型。
- 编写服务请求节点,生成新的乌龟。
实现流程:
- 通过ros命令获取服务与服务消息信息。
- 编码实现服务请求节点。
- 启动 roscore、turtlesim_node 、乌龟生成节点,生成新的乌龟。
1、服务名称与服务消息获取
获取话题:/spawn
rosservice list
获取消息类型:turtlesim/Spawn
rosservice type /spawn
获取消息格式:
rossrv info turtlesim/Spawn
响应结果:
float32 x
float32 y
float32 theta
string name
---
string name
2、服务端实现
创建功能包需要依赖的功能包: roscpp rospy std_msgs turtlesim
Cpp的实现:
/*
生成一只小乌龟
准备工作:
1.服务话题 /spawn
2.服务消息类型 turtlesim/Spawn
3.运行前先启动 turtlesim_node 节点
实现流程:
1.包含头文件
需要包含 turtlesim 包下资源,注意在 package.xml 配置
2.初始化 ros 节点
3.创建 ros 句柄
4.创建 service 客户端
5.等待服务启动
6.发送请求
7.处理响应
*/
#include "ros/ros.h"
#include "turtlesim/Spawn.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ros 节点
ros::init(argc,argv,"set_turtle");
// 3.创建 ros 句柄
ros::NodeHandle nh;
// 4.创建 service 客户端
ros::ServiceClient client = nh.serviceClient<turtlesim::Spawn>("/spawn");
// 5.等待服务启动
// client.waitForExistence();
ros::service::waitForService("/spawn");
// 6.发送请求
turtlesim::Spawn spawn;
spawn.request.x = 1.0;
spawn.request.y = 1.0;
spawn.request.theta = 1.57;
spawn.request.name = "my_turtle";
bool flag = client.call(spawn);
// 7.处理响应结果
if (flag)
{
ROS_INFO("新的乌龟生成,名字:%s",spawn.response.name.c_str());
} else {
ROS_INFO("乌龟生成失败!!!");
}
return 0;
}
Python的实现:
#! /usr/bin/env python
"""
生成一只小乌龟
准备工作:
1.服务话题 /spawn
2.服务消息类型 turtlesim/Spawn
3.运行前先启动 turtlesim_node 节点
实现流程:
1.导包
需要包含 turtlesim 包下资源,注意在 package.xml 配置
2.初始化 ros 节点
3.创建 service 客户端
4.等待服务启动
5.发送请求
6.处理响应
"""
import rospy
from turtlesim.srv import Spawn,SpawnRequest,SpawnResponse
if __name__ == "__main__":
# 2.初始化 ros 节点
rospy.init_node("set_turtle_p")
# 3.创建 service 客户端
client = rospy.ServiceProxy("/spawn",Spawn)
# 4.等待服务启动
client.wait_for_service()
# 5.发送请求
req = SpawnRequest()
req.x = 2.0
req.y = 2.0
req.theta = -1.57
req.name = "my_turtle_p"
try:
response = client.call(req)
# 6.处理响应
rospy.loginfo("乌龟创建成功!,叫:%s",response.name)
except expression as identifier:
rospy.loginfo("服务调用失败")
3、运行
首先,启动 roscore;
然后启动乌龟显示节点;
最后启动乌龟生成请求节点;
最终执行结果与演示结果类似。
四、参数设置
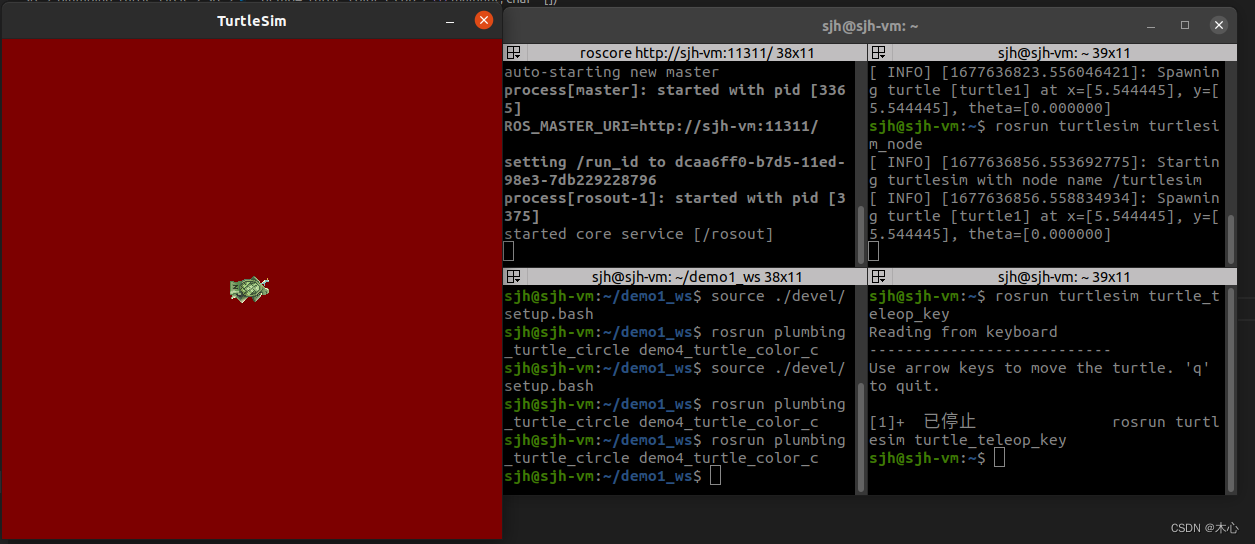
需求描述: 修改turtlesim乌龟显示节点窗体的背景色,已知背景色是通过参数服务器的方式以 rgb 方式设置的。
效果如下:
实现分析:
- 首先,需要启动乌龟显示节点。
- 要通过ROS命令,来获取参数服务器中设置背景色的参数。
- 编写参数设置节点,修改参数服务器中的参数值。
实现流程:
- 通过ros命令获取参数。
- 编码实现服参数设置节点。
- 启动 roscore、turtlesim_node 与参数设置节点,查看运行结果。
1、参数名的获取
获取参数列表:
rosparam list
响应结果:
/turtlesim/background_b
/turtlesim/background_g
/turtlesim/background_r
2、参数修改
Cpp实现
/*
注意命名空间的使用。
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
ros::init(argc,argv,"haha");
ros::NodeHandle nh("turtlesim");
//ros::NodeHandle nh;
// ros::param::set("/turtlesim/background_r",0);
// ros::param::set("/turtlesim/background_g",0);
// ros::param::set("/turtlesim/background_b",0);
nh.setParam("background_r",0);
nh.setParam("background_g",0);
nh.setParam("background_b",0);
return 0;
}
Python的实现
#! /usr/bin/env python
import rospy
if __name__ == "__main__":
rospy.init_node("hehe")
# rospy.set_param("/turtlesim/background_r",255)
# rospy.set_param("/turtlesim/background_g",255)
# rospy.set_param("/turtlesim/background_b",255)
rospy.set_param("background_r",255)
rospy.set_param("background_g",255)
rospy.set_param("background_b",255) # 调用时,需要传入 __ns:=xxx
3、运行
首先,启动 roscore;
然后启动背景色设置节点;
最后启动乌龟显示节点;
最终执行结果与演示结果类似。
PS: 注意节点启动顺序,如果先启动乌龟显示节点,后启动背景色设置节点,那么颜色设置不会生效。