【prometheus】-02 一张图彻底搞懂Prometheus服务发现机制



Prometheus服务发现机制之File
概述
上一文分析了Prometheus服务发现原理、整体运行的流程,接下来的几篇我们会对比较常见的服务发现协议进行了解。
相对于静态配置方式,基于文件发现机制是一种更加常用的方式,通过监听JSON和YAML格式文件变更事件进行动态target加载,文件格式如下:
JSON json [ { "targets": [ "<host>", ... ], "labels": { "<labelname>": "<labelvalue>", ... } }, ... ]
YAML yaml - targets: [ - '<host>' ] labels: [ <labelname>: <labelvalue> ... ]
虽然,文件发现服务是基于文件事件监听实时感知的,但是作为补偿,Prometheus提供了定时周期刷新文件机制:
- job_name: 'file_ds'
file_sd_configs:
- files:
- d:/prometheus-data/targets/f1.json #支持文件后缀 .json、.yml和.yaml
- d:/prometheus-data/targets/f2.json
refresh_interval: 1m #自动发现间隔时间,默认5m
refresh_interval就是用来设置定时周期刷新时间间隔,默认5分钟。注意:该参数没必要设置很小,Prometheus本身监听文件变更事件实时刷新,定时周期刷新只是作为一种补偿机制。
另外,每个target在relabel阶段会添加一个__meta_filepath标签,值就是提取target对应的文件路径。
files中配置的文件路径最后一级支持通配符*,比如my/path/tg_*.json。
协议分析
上一节分析的Prometheus服务发现大致原理如下图:
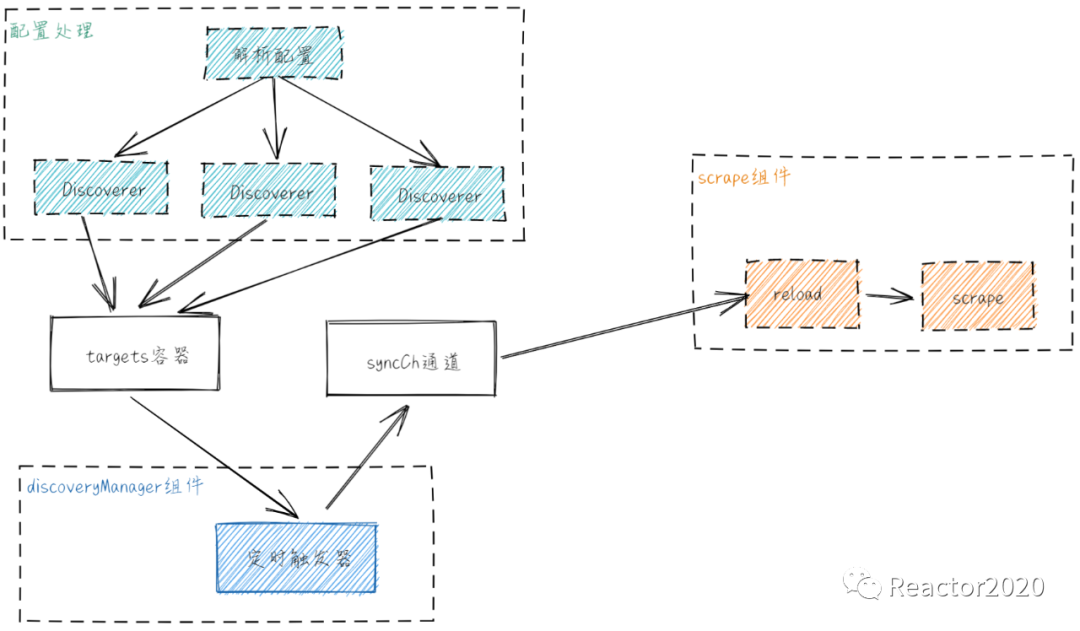
主要包括三部分之间协调联动完成主要功能,协议部分主要是在【配置处理】部分,通过配置中定义的服务发现类型会被解析成不同协议对应的SDConfig实现,然后创建Discovery,其内部封装了不同服务协议具体实现内容,最后调用Discovery.Run()启动服务开始进行服务发现。
1、基于文件服务发现配置解析
假如我们定义如下job:
- job_name: 'file_ds'
file_sd_configs:
- files:
- d:/prometheus-data/targets/f1.json
- d:/prometheus-data/targets/f2.json
refresh_interval: 30s
会被解析成file.SDConfig如下:

file.SDConfig定义如下:
type SDConfig struct {
Files []string `yaml:"files"`
RefreshInterval model.Duration `yaml:"refresh_interval,omitempty"`
}
该结构体定义比较简单:文件路径和周期刷新间隔。
2、Discovery创建
func NewDiscovery(conf *SDConfig, logger log.Logger) *Discovery {
if logger == nil {
logger = log.NewNopLogger()
}
disc := &Discovery{
paths: conf.Files,
interval: time.Duration(conf.RefreshInterval),
timestamps: make(map[string]float64),
logger: logger,
}
fileSDTimeStamp.addDiscoverer(disc)
return disc
}
3、Discovery创建完成,最后会调用Discovery.Run()启动服务发现:
func (d *Discovery) Run(ctx context.Context, ch chan<- []*targetgroup.Group) {
//fsnotify 能监控指定文件夹内文件的修改情况,如 文件的增加、删除、修改、重命名等操作。
watcher, err := fsnotify.NewWatcher()
if err != nil {
level.Error(d.logger).Log("msg", "Error adding file watcher", "err", err)
return
}
d.watcher = watcher
defer d.stop()
d.refresh(ctx, ch)
ticker := time.NewTicker(d.interval)
defer ticker.Stop()
for {
select {
case <-ctx.Done():
return
case event := <-d.watcher.Events:
if len(event.Name) == 0 {
break
}
if event.Op^fsnotify.Chmod == 0 {
break
}
d.refresh(ctx, ch)
case <-ticker.C:
d.refresh(ctx, ch)
case err := <-d.watcher.Errors:
if err != nil {
level.Error(d.logger).Log("msg", "Error watching file", "err", err)
}
}
}
}
存在三种情况下会去调用d.refresh(ctx, ch)逻辑:
1、Run方法调用时,会先调用一次d.refresh(ctx, ch),然后进入无限for循环部分;
2、case event := <-d.watcher.Events:监控到目录文件出现变更时;
3、case <-ticker.C:定时周期执行调用,周期时间通过refresh_interval设置,默认5分钟;
4、上面分析了几种情况下都会去调用d.refresh(ctx, ch)逻辑,基于文件发现协议主要实现逻辑就在这里:
func (d *Discovery) refresh(ctx context.Context, ch chan<- []*targetgroup.Group) {
t0 := time.Now()
defer func() {
fileSDScanDuration.Observe(time.Since(t0).Seconds())
}()
ref := map[string]int{}
// listFiles()根据file_sd_configs配置中files配置查找出所有符合的文件
for _, p := range d.listFiles() {
// readFile()读取文件内容,解析出[]*targetgroup.Group
tgroups, err := d.readFile(p)
if err != nil {//如果出错,跳过当前文件继续处理下一个文件
fileSDReadErrorsCount.Inc()
level.Error(d.logger).Log("msg", "Error reading file", "path", p, "err", err)
// Prevent deletion down below.
ref[p] = d.lastRefresh[p]
continue
}
select {
// 将从文件中解析的[]*targetgroup.Group通过channel发送出去
case ch <- tgroups:
case <-ctx.Done():
return
}
ref[p] = len(tgroups)
}
// Send empty updates for sources that disappeared.
// d.lastRefresh记录上次刷新的,ref记录当次刷新的,p是文件名
// 上次刷新文件存在,但是当前刷新该文件没有,则该文件被删除,则发送空target集合过去覆盖掉之前的target数据
for f, n := range d.lastRefresh {
m, ok := ref[f]
if !ok || n > m {//文件被删,则发送空target
level.Debug(d.logger).Log("msg", "file_sd refresh found file that should be removed", "file", f)
d.deleteTimestamp(f)
for i := m; i < n; i++ {
select {
// 发送[]*targetgroup.Group,但是targets是空,覆盖掉之前
case ch <- []*targetgroup.Group{
{Source: fileSource(f, i)}}:
case <-ctx.Done():
return
}
}
}
}
d.lastRefresh = ref
// 添加文件变更监听
d.watchFiles()
}
总结
基于文件方式的服务发现总结下如下图:
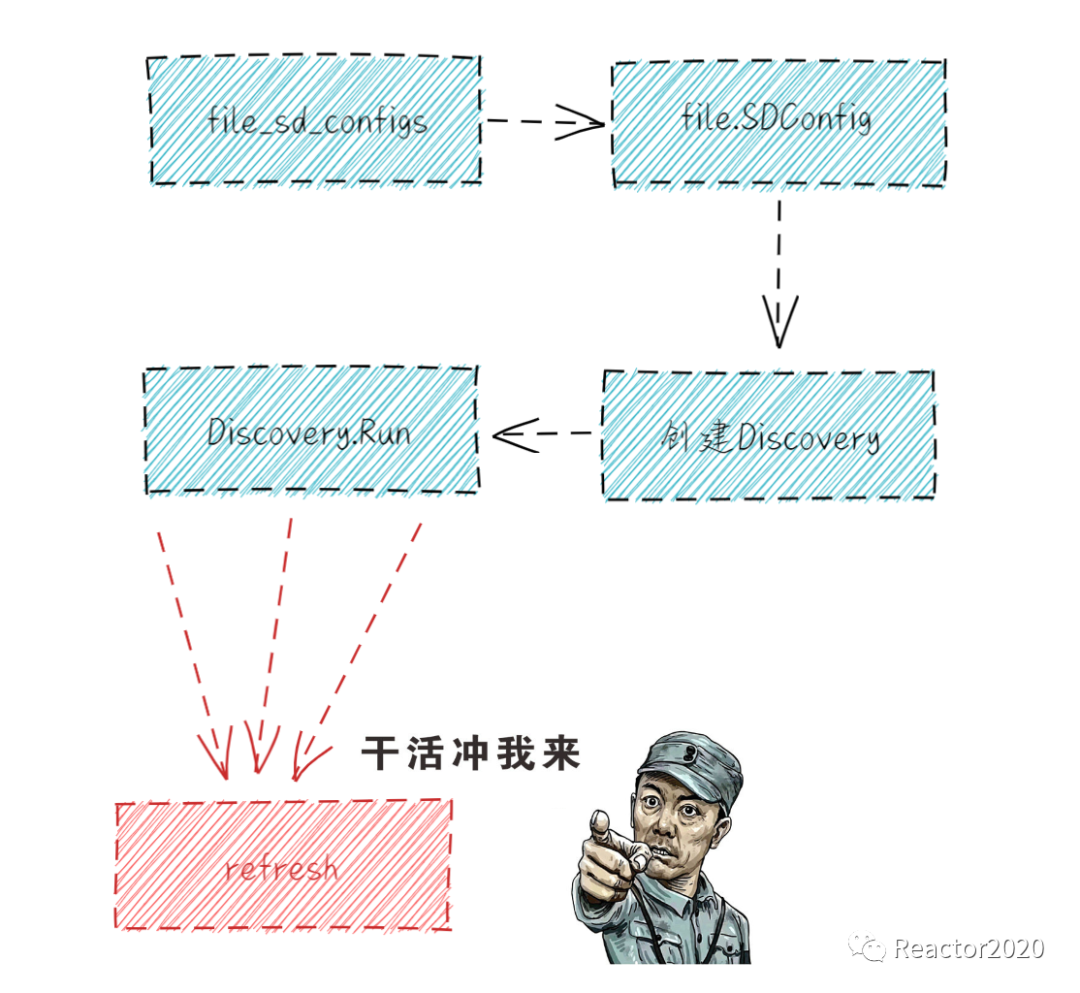
大概说明:
1、Prometheus配置中服务发现为file_sd_configs的job会被解析成file.SDConfig;
2、然后创建出Discovery,Discovery可以看成用于服务发现target核心组件;
3、然后调用Discovery.Run方法开始启动,这时Discovery组件就开始去发现target信息;
4、真正干活部分都被封装到refresh方法中,Discovery.Run会在三种场景下调用该方法:
a、Discovery.Run刚启动时;
b、file_sd_configs中files文件出现变更;
c、定时周期刷新,补偿机制,刷新周期通过refresh_interval参数控制,默认5分钟;
5、refresh方法中将发现的最新targets信息通过channel通道传递出去,最后一层层传递到scrape组件,具体参加上节分析流程。

长按二维码识别关注