unity的欧拉角总是基于当前坐标系的x,y,z轴旋转的,假如一个物体x,y,z三轴都有旋转角度,那么旋转的顺序是,y轴-》x轴-》z轴。
也就是说先在本地坐标沿着y轴旋转y角度,得到一个新的x,y,z坐标系,再沿着此坐标系的x轴旋转x角度,再得到一个新的坐标系,再沿着此坐标系的z轴旋转z角度。此时如果把x,y,z理解成父,子关系,让人很难想象和理解,因为缺少了顺序这个特性。
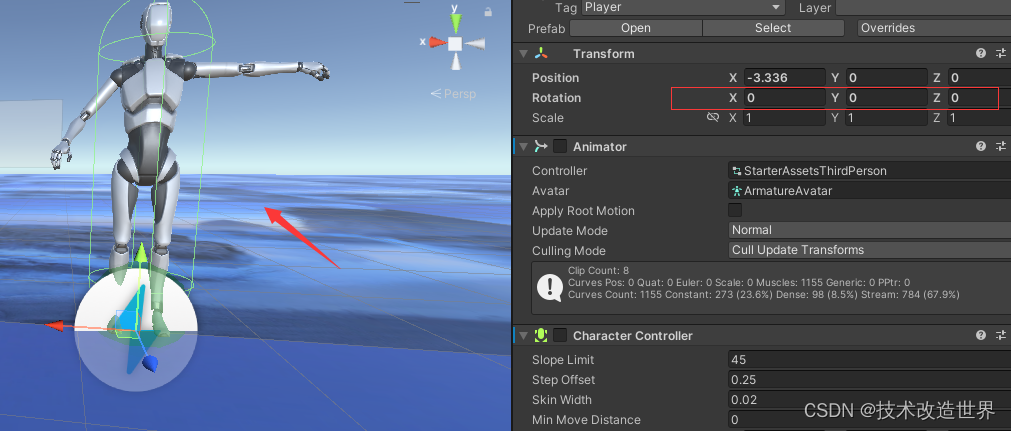
下面出图说明(红色x轴,绿色y轴,蓝色z轴):
首先没有旋转如下:
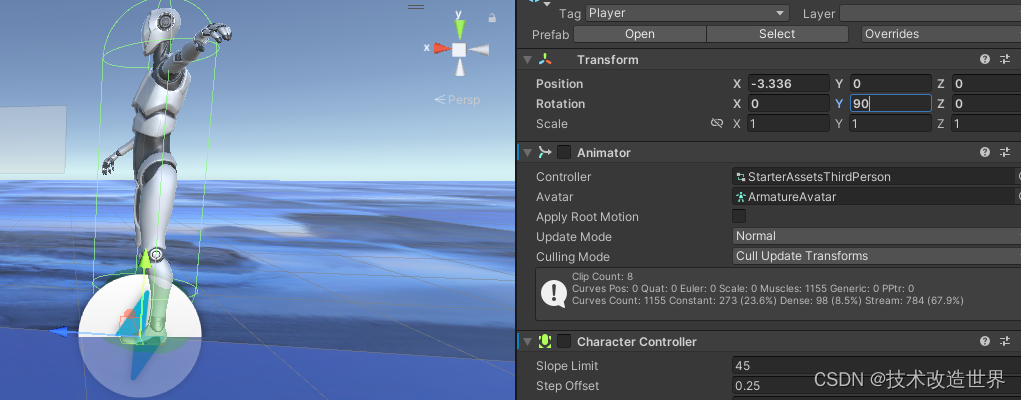
绕y轴旋转90度:
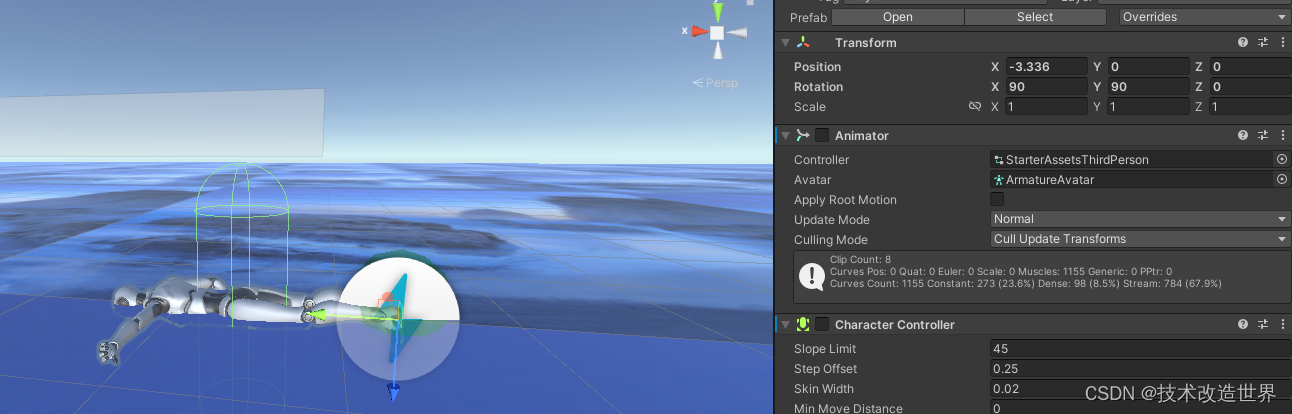
再绕x轴旋转角度90度:
再绕z轴旋转90度:

使用代码设置四元数也可以达到相同结果,只不过经过一系列计算之后只是近似结果。代码如下
transform.localRotation = Quaternion.Euler(90,90,90);
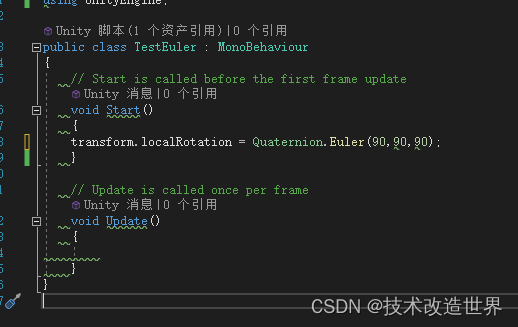
实际上产生的结果是这样:
四元数可以通过乘法进行融合,Quaternion.Euler(45,45,45) 与以下式子相等:
var x = Quaternion.Euler(45,0,0);
var y = Quaternion.Euler(0, 45, 0);
var z = Quaternion.Euler(0, 0, 45);
transform.localRotation = y * x * z;// 此处顺序不能乱