
1.开发背景介绍
我们在研发机器人的时候常常会用到一些调试工具,串口调试就是其中一种。在调试机器人电机及编码器的时候经常会用到,比如我们的各个型号的机器人因为会用到不同的电机及编码器,有时安装方式也会不一样,这时候常常就需要根据我们提供的代码对机器人做相应调试。
我们之前也试用了一些串口调试工具,发现以下主要问题:
①Linux下易用的串口调试工具不多,而机器人开发目前主要基于Linux系统。
②大多是相对通用的串口调试工具,没有对机器人调试做特别设计。
③跨平台的工具比较少
于是我们结合我们自己在研发过程中的需求和用户的反馈。试着去开发一款主要面向机器人开发的调试助手。至少解决上面提到的问题。
经过一段时间的开发,今天我们正式推出这个工具的测试版
2.目前实现的效果
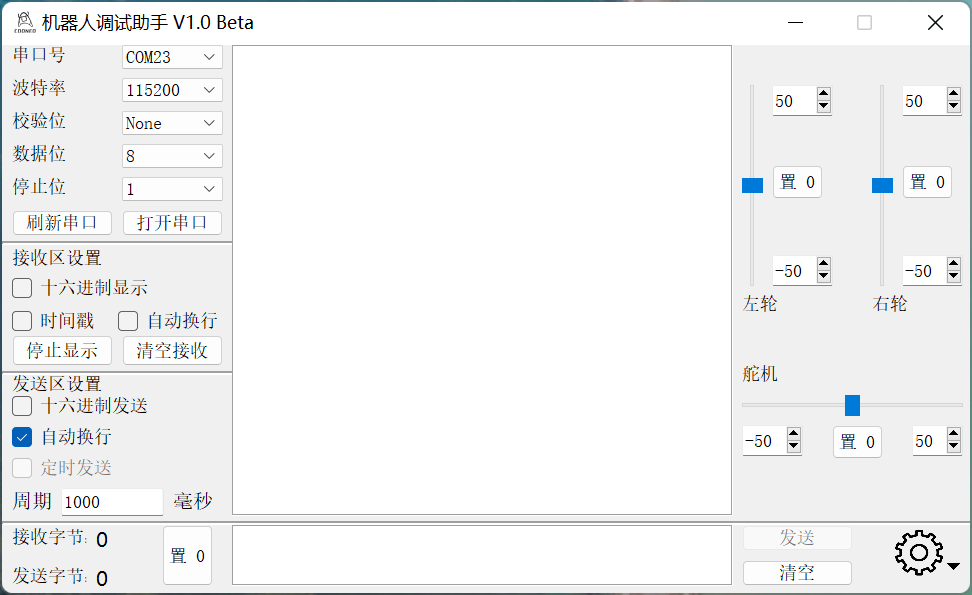
Windows下效果图:
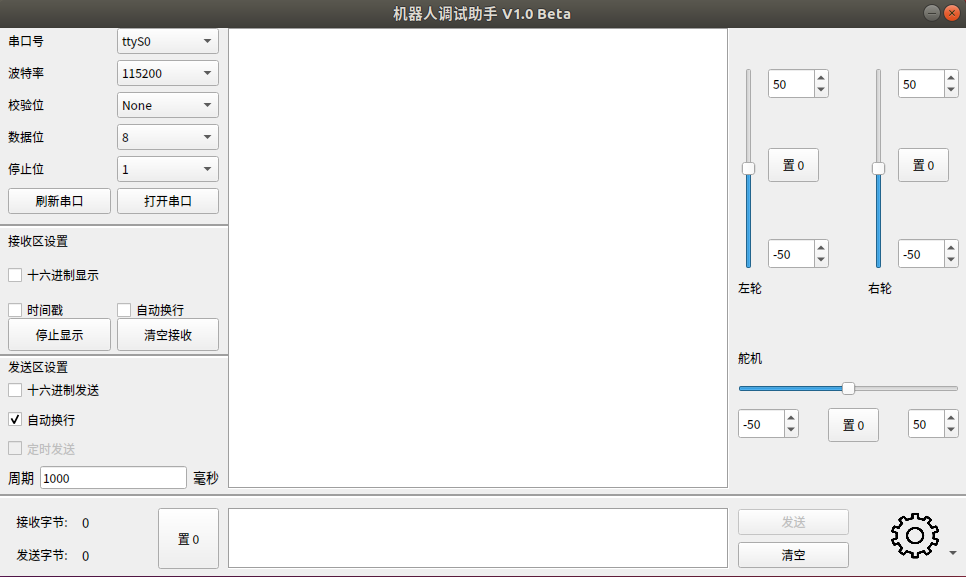
Linux下效果图:
3.功能介绍
该款调试助手主要由以下几部分组成:串口配置区、接收区、发送区、机器人调试区以及功能设置区组成。
串口配置区对串口的波特率、校验位、数据位、停止位以及硬件流(内部默认关闭硬件流控)进行了配置。
接收区实现了Hex显示与文本显示的切换、加时间戳显示、自动换行显示、清空接收区以及停止显示等功能。
发送区实现了Hex发送与文本发送的切换、自动换行发送、定时发送以及回车发送等功能。
功能设置区即图上齿轮处,可进行中英文界面的切换,拓展功能也都可加在此处。
右边的机器人调试区算是一个特别设计区域:能更高效、直观的对机器人进行调试。
4.软件使用
(1)Windows平台使用
Windows下最终打包成了单个exe文件,可直接双击使用,无需安装。

(2)Linux平台使用
Linux下目前是打包成单个deb包,可通过apt、dpkg命令及直接双击进行安装与卸载,使用方便。
5.软件测试(Windows平台)
(1)测试平台
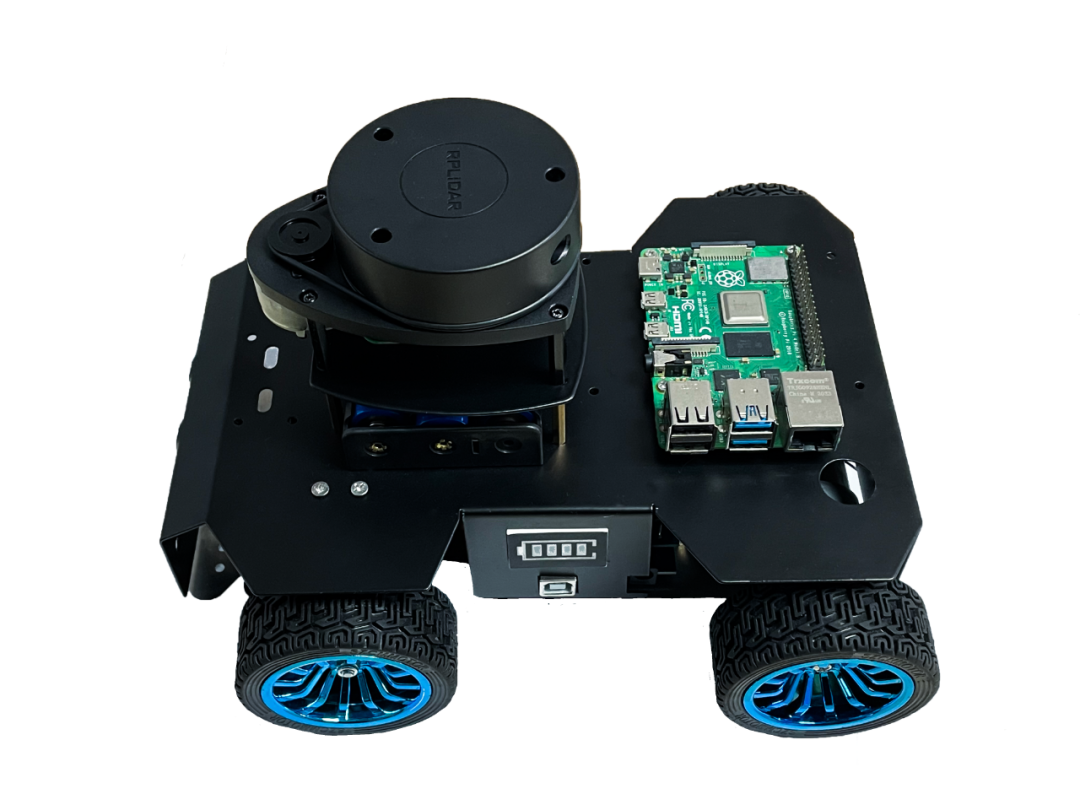
如下图所示,该软件的测试采用了我们最新优化升级的Nano阿克曼无人车。

(2)左轮测试
①文本框发送测试

②滑轨发送测试
(3)右轮测试
①文本框发送测试

②滑轨发送测试

(4)舵机测试
①文本框发送测试
②滑轨发送测试

(5)整体测试
6.软件测试(Linux平台)
Linux平台测试与Windows测试内容几乎相同,本部分只进行了整体测试。

总结:
通过上面的简单介绍,大家可以了解到我们这款机器人调试助手目前的几大特点:
①Windows和Ubuntu下一致的使用体验
②具备常用的串口调试功能
③专门为机器人高效调试开辟了一个区域。
需要说明的是机器人调试区目前主要适用于COONEO各Arduino及STM32主控板使用相应协议的机器人。
欢迎大家试用这款工具,对话框发送 “机器人调试助手” 就可以获取下载方式。欢迎大家提出意见和建议。我们将持续对其进行优化,争取让其成为机器人调试的好帮手。

创作不易,如果喜欢这篇内容,请您也转发给您的朋友,一起分享和交流创造的乐趣,也激励我们为大家创作更多的机器人研发攻略,让我们一起learning by doing!