1. 自解压内核映像
内核映像被加载到内存并获得控制权之后,内核启动流程开始。通常,内核映像以压缩形式存储,并不是一个可以执行的内核。因此,内核阶段的首要工作是自解压内核映像。
内核镜像和几个名词有关:vmliux、Image、zImage
ARM32平台 编译一个压缩后的内核镜像:
make zImage
-》
LD vmlinux
SYSMAP System.map
SYSMAP .tmp_System.map
OBJCOPY arch/arm/boot/Image
Kernel: arch/arm/boot/Image is ready
AS arch/arm/boot/compressed/head.o
GZIP arch/arm/boot/compressed/piggy.gz
AS arch/arm/boot/compressed/piggy.o
CC arch/arm/boot/compressed/misc.o
AS arch/arm/boot/compressed/head-xscale.o
LD arch/arm/boot/compressed/vmlinux
OBJCOPY arch/arm/boot/zImage
可以看到这个命令会先生成vmlinux,然后经过OBJCOPY操作生成对应的镜像。内核编译都会先生成未经过压缩的镜像,然后在生成压缩的镜像。以上过程可以分为两个部分:
- 第一步生成未经过压缩的vmlinux、Image
- 第二步生成压缩的vmlinux、zImage
对应关系是这样的:
未压缩的内核镜像生成过程:
vmlinux ---OBJCOPY---> arch/arm/boot/Image
压缩的内核镜像生成过程:
arch/arm/boot/compressed/vmlinux ---OBJCOPY ---> arch/arm/boot/zImage
一般编译器链接生成的文件都是一个ELF格式的可执行文件,对于内核来说也就是经过LD后生成vmlinux,然后利用OBJCOPY工具处理这个EFL文件,去除其中的符号和重定位信息等等,生成一个完全的二进制文件Image。因此当我们需要debug内核时,一定是需要有内核版本对应的vmlinux文件,因为它其中包含了符号信息。可以利用 readelf -s vmlinux 来查看其中的内核符号。
ARM64平台:
和 arm32 平台不同的是,在 arm64 平台上,一般我们直接生成未压缩的内核镜像来运行,它相对于上面介绍的编译过程省略了压缩的过程。
LD vmlinux
SYSMAP System.map
SYSMAP .tmp_System.map
OBJCOPY arch/arm64/boot/Image
Kernel: arch/arm64/boot/Image is ready
通过上面的log可以看到并没有生成对应的compressed目录来处理内核压缩。仅仅生成了一个版本的内核镜像。
vmlinux ---OBJCOPY---> arch/arm64/boot/Image
内核编译生成vmliunx后,通常会对其进行压缩,得到zImage(小内核,小于512KB)或bzImage(大内核,大于512KB)。
我们看32位的:
通过linux/arch/arm/boot/compressed目录下的Makefile寻找到vmlinux文件的链接脚本(vmlinux.lds),从中查找系统启动入口函数。
$(obj)/vmlinux: $(obj)/vmlinux.lds $(obj)/$(HEAD) $(obj)/piggy.$(suffix_y).o \
$(addprefix $(obj)/, $(OBJS)) $(lib1funcs) $(ashldi3) \
$(bswapsdi2) FORCE
@$(check_for_multiple_zreladdr)
$(call if_changed,ld)
@$(check_for_bad_syms)
vmlinux.lds(linux/arch/arm/kernel/vmlinux.lds)链接脚本开头内容
OUTPUT_ARCH(arm)
ENTRY(stext)
jiffies = jiffies_64;
SECTIONS
{
。
。
。
得到内核入口函数为 stext(linux/arch/arm/kernel/head.S)
ENTRY(stext)
。
。
。
bl __lookup_processor_type @ r5=procinfo r9=cpuid //处理器是否支持
movs r10, r5 @ invalid processor (r5=0)?
THUMB( it eq ) @ force fixup-able long branch encoding
beq __error_p @ yes, error 'p' //不支持则打印错误信息
。
。
。
bl __create_page_tables //创建页表
/*
* The following calls CPU specific code in a position independent
* manner. See arch/arm/mm/proc-*.S for details. r10 = base of
* xxx_proc_info structure selected by __lookup_processor_type
* above. On return, the CPU will be ready for the MMU to be
* turned on, and r0 will hold the CPU control register value.
*/
ldr r13, =__mmap_switched @ address to jump to after //保存MMU使能后跳转地址
@ mmu has been enabled
adr lr, BSYM(1f) @ return (PIC) address
mov r8, r4 @ set TTBR1 to swapper_pg_dir
ARM( add pc, r10, #PROCINFO_INITFUNC )
THUMB( add r12, r10, #PROCINFO_INITFUNC )
THUMB( mov pc, r12 )
1: b __enable_mmu //使能MMU后跳转到__mmap_switched
查找标签__mmap_switched所在位置:/linux/arch/arm/kernel/head-common.S
__mmap_switched:
/*
* The following fragment of code is executed with the MMU on in MMU mode,
* and uses absolute addresses; this is not position independent.
*
* r0 = cp#15 control register
* r1 = machine ID
* r2 = atags/dtb pointer
* r9 = processor ID
*/
//保存设备信息、设备树及启动参数存储地址
。
。
。
b start_kernel
2. head.S(内核引导阶段)
这里我们叫head.S的工作为内核引导阶段
- 1.判断是否支持这个CPU(机器ID)
- 2.判断是否支持这个单板
- 3.建立页表,启动MMU
- 4.跳到start_kernel

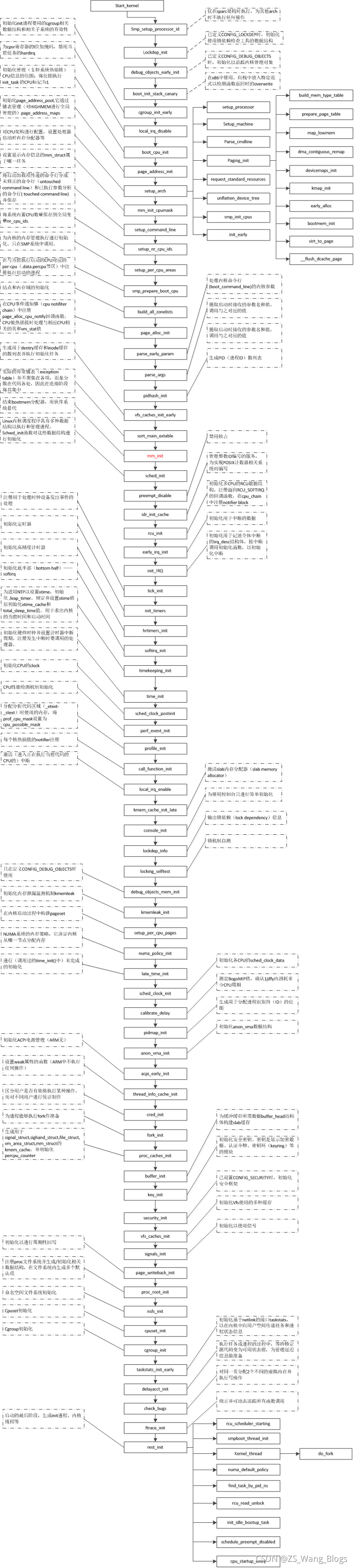
3. start_kernel(内核的第一个c函数)
参考:https://www.cnblogs.com/lifexy/p/7366782.html
- local_irq_disable(); 关闭当前CUP中断
- tick_init(); 初始化time ticket,时钟
- boot_cpu_init(); 初始化管理,CPU信息位图
- page_address_init(); 初始化页地址
- printk(KERN_NOTICE); 打印KER_NOTICE,这里的KER_NOTICE是字符串
- printk(linux_banner); 打印以下linux版本信息:
“Linux version 2.6.22.6 (book@book-desktop) (gcc version 3.4.5) #1 Fri Jun 16 00:55:53 CST 2017” */ - setup_arch(&command_line); 系结构相关的内核初始化过程,处理uboot传递进来的atag参数
- setup_command_line(command_line); 处理启动命令,这里就是设置的cmd_line
- sched_init(); //进程调度器初始化
- preempt_disable(); 禁止内核抢占
- build_all_zonelists(NULL); 设置node 和 zone 数据结构
- page_alloc_init(); 初始化page allocation相关结构
- printk(KERN_NOTICE “Kernel command line: %s/n”, boot_command_line); 打印Linux启动命令行参数
- parse_early_param(); 解析内核参数
- trap_init(); 初始化中断向量表
- mm_init(); memory map初始化
- sched_init();
- rcu_init(); Read-Copy-Update的初始化
- init_IRQ(); 初始化IRQ中断和终端描述符
- softirq_init(); 软中断初始化
- local_irq_enable(); 与local_irq_disbale相对应,开CPU中断
- vfs_caches_init_early(); 虚拟文件系统的初始化
- kmem_cache_init(); slab初始化
vfs_caches_init(totalram_pages);挂载sysfs文件系统和roofs文件系统,并创建了第一个挂载点目录:'/'- signals_init(); 创建信号队列
- acpi_early_init(); 电源相关的初始化
- rest_init(); 创建init进程,创建根文件系统,启动应用程序
主要就是初始化时钟、初始化内存相关mm,slab,初始化中断和向量表,进程调度器,解析内核参数,打印启动命令,挂载根文件系统,然后调用rest_init去创建init进程
详细代码如下:
asmlinkage void __init start_kernel(void)
{
char * command_line;
extern struct kernel_param __start___param[], __stop___param[];
smp_setup_processor_id(); //来设置smp process id,当然目前看到的代码里面这里是空的
unwind_init();
//lockdep是linux内核的一个调试模块,用来检查内核互斥机制尤其是自旋锁潜在的死锁问题。
//自旋锁由于是查询方式等待,不释放处理器,比一般的互斥机制更容易死锁,
//故引入lockdep检查以下几种情况可能的死锁(lockdep将有专门的文章详细介绍,在此只是简单列举):
//
//·同一个进程递归地加锁同一把锁;
//
//·一把锁既在中断(或中断下半部)使能的情况下执行过加锁操作,
// 又在中断(或中断下半部)里执行过加锁操作。这样该锁有可能在锁定时由于中断发生又试图在同一处理器上加锁;
//
//·加锁后导致依赖图产生成闭环,这是典型的死锁现象。
lockdep_init();
//关闭当前CUP中断
local_irq_disable();
//修改标记early_boot_irqs_enabled;
//通过一个静态全局变量 early_boot_irqs_enabled来帮助我们调试代码,
//通过这个标记可以帮助我们知道是否在”early bootup code”,也可以通过这个标志警告是有无效的终端打开
early_boot_irqs_off();
//每一个中断都有一个IRQ描述符(struct irq_desc)来进行描述。
//这个函数的主要作用是设置所有的 IRQ描述符(struct irq_desc)的锁是统一的锁,
//还是每一个IRQ描述符(struct irq_desc)都有一个小锁。
early_init_irq_lock_class();
/*
* Interrupts are still disabled. Do necessary setups, then
* enable them
*/
// 大内核锁(BKL--Big Kernel Lock)
//大内核锁本质上也是自旋锁,但是它又不同于自旋锁,自旋锁是不可以递归获得锁的,因为那样会导致死锁。
//但大内核锁可以递归获得锁。大内核锁用于保护整个内核,而自旋锁用于保护非常特定的某一共享资源。
//进程保持大内核锁时可以发生调度,具体实现是:
//在执行schedule时,schedule将检查进程是否拥有大内核锁,如果有,它将被释放,以致于其它的进程能够获得该锁,
//而当轮到该进程运行时,再让它重新获得大内核锁。注意在保持自旋锁期间是不运行发生调度的。
//需要特别指出,整个内核只有一个大内核锁,其实不难理解,内核只有一个,而大内核锁是保护整个内核的,当然有且只有一个就足够了。
//还需要特别指出的是,大内核锁是历史遗留,内核中用的非常少,一般保持该锁的时间较长,因此不提倡使用它。
//从2.6.11内核起,大内核锁可以通过配置内核使其变得可抢占(自旋锁是不可抢占的),这时它实质上是一个互斥锁,使用信号量实现。
//大内核锁的API包括:
//
//void lock_kernel(void);
//
//该函数用于得到大内核锁。它可以递归调用而不会导致死锁。
//
//void unlock_kernel(void);
//
//该函数用于释放大内核锁。当然必须与lock_kernel配对使用,调用了多少次lock_kernel,就需要调用多少次unlock_kernel。
//大内核锁的API使用非常简单,按照以下方式使用就可以了:
//lock_kernel(); //对被保护的共享资源的访问 … unlock_kernel();
//http://blog.csdn.net/universus/archive/2010/05/25/5623971.aspx
lock_kernel();
//初始化time ticket,时钟
tick_init();
//函数 tick_init() 很简单,调用 clockevents_register_notifier 函数向 clockevents_chain 通知链注册元素:
// tick_notifier。这个元素的回调函数指明了当时钟事件设备信息发生变化(例如新加入一个时钟事件设备等等)时,
//应该执行的操作,该回调函数为 tick_notify
//http://blogold.chinaunix.net/u3/97642/showart_2050200.html
boot_cpu_init();
//初始化页地址,当然对于arm这里是个空函数
//http://book.chinaunix.net/special/ebook/PrenticeHall/PrenticeHallPTRTheLinuxKernelPrimer/0131181637/ch08lev1sec5.html
page_address_init();
/*打印KER_NOTICE,这里的KER_NOTICE是字符串<5>*/
printk(KERN_NOTICE);
/*打印以下linux版本信息:
“Linux version 2.6.22.6 (book@book-desktop) (gcc version 3.4.5) #1 Fri Jun 16 00:55:53 CST 2017” */
printk(linux_banner);
//系结构相关的内核初始化过程,处理uboot传递进来的atag参数( setup_memory_tags()和setup_commandline _tags() )
//http://www.cublog.cn/u3/94690/showart_2238008.html
setup_arch(&command_line);
//处理启动命令,这里就是设置的cmd_line,
//保存未改变的comand_line到字符数组static_command_line[] 中。
//保存 boot_command_line到字符数组saved_command_line[]中
setup_command_line(command_line);
unwind_setup();
//如果没有定义CONFIG_SMP宏,则这个函数为空函数。
//如果定义了CONFIG_SMP宏,则这个setup_per_cpu_areas()函数给每个CPU分配内存,
//并拷贝.data.percpu段的数据。为系统中的每个CPU的per_cpu变量申请空间。
setup_per_cpu_areas();
//定义在include/asm-x86/smp.h。
//如果是SMP环境,则设置boot CPU的一些数据。在引导过程中使用的CPU称为boot CPU
smp_prepare_boot_cpu(); /* arch-specific boot-cpu hooks */
/* 进程调度器初始化 */
sched_init();
/* 禁止内核抢占 */
preempt_disable();
//设置node 和 zone 数据结构
//内存管理的讲解:http://blog.chinaunix.net/space.php?uid=361890&do=blog&cuid=2146541
build_all_zonelists(NULL);
//初始化page allocation相关结构
page_alloc_init();
/* 打印Linux启动命令行参数 */
printk(KERN_NOTICE "Kernel command line: %s/n", boot_command_line);
//解析内核参数
//对内核参数的解析:http://hi.baidu.com/yuhuntero/blog/item/654a7411e45ce519b8127ba9.html
parse_early_param();
parse_args("Booting kernel", static_command_line, __start___param,
__stop___param - __start___param,
&unknown_bootoption);
/*
* These use large bootmem allocations and must precede
* kmem_cache_init()
*/
//初始化hash表,以便于从进程的PID获得对应的进程描述指针,按照实际的物理内存初始化pid hash表
//这里涉及到进程管理http://blog.csdn.net/satanwxd/archive/2010/03/27/5422053.aspx
pidhash_init();
//初始化VFS的两个重要数据结构dcache和inode的缓存。
//http://blog.csdn.net/yunsongice/archive/2011/02/01/6171324.aspx
vfs_caches_init_early();
//把编译期间,kbuild设置的异常表,也就是__start___ex_table和__stop___ex_table之中的所有元素进行排序
sort_main_extable();
//初始化中断向量表
//http://blog.csdn.net/yunsongice/archive/2011/02/01/6171325.aspx
trap_init();
//memory map初始化
//http://blog.csdn.net/huyugv_830913/archive/2010/09/15/5886970.aspx
mm_init();
/*
* Set up the scheduler prior starting any interrupts (such as the
* timer interrupt). Full topology setup happens at smp_init()
* time - but meanwhile we still have a functioning scheduler.
*/
//核心进程调度器初始化,调度器的初始化的优先级要高于任何中断的建立,
//并且初始化进程0,即idle进程,但是并没有设置idle进程的NEED_RESCHED标志,
//所以还会继续完成内核初始化剩下的事情。
//这里仅仅为进程调度程序的执行做准备。
//它所做的具体工作是调用init_bh函数(kernel/softirq.c)把timer,tqueue,immediate三个人物队列加入下半部分的数组
sched_init();
/*
* Disable preemption - early bootup scheduling is extremely
* fragile until we cpu_idle() for the first time.
*/
//抢占计数器加1
preempt_disable();
//检查中断是否打开,如果已经打开,则关闭中断
if (!irqs_disabled()) {
printk(KERN_WARNING "start_kernel(): bug: interrupts were "
"enabled *very* early, fixing it/n");
local_irq_disable();
}
sort_main_extable(); /*
* trap_init函数完成对系统保留中断向量(异常、非屏蔽中断以及系统调用)
* 的初始化,init_IRQ函数则完成其余中断向量的初始化
*/
trap_init();
//Read-Copy-Update的初始化
//RCU机制是Linux2.6之后提供的一种数据一致性访问的机制,
//从RCU(read-copy-update)的名称上看,我们就能对他的实现机制有一个大概的了解,
//在修改数据的时候,首先需要读取数据,然后生成一个副本,对副本进行修改,
//修改完成之后再将老数据update成新的数据,此所谓RCU。
//http://blog.ednchina.com/tiloog/193361/message.aspx
//http://blogold.chinaunix.net/u1/51562/showart_1341707.html
rcu_init();
//初始化IRQ中断和终端描述符。
//初始化系统中支持的最大可能的中断描述结构struct irqdesc变量数组irq_desc[NR_IRQS],
//把每个结构变量irq_desc[n]都初始化为预先定义好的坏中断描述结构变量bad_irq_desc,
//并初始化该中断的链表表头成员结构变量pend
init_IRQ();
/* 初始化hash表,便于从进程的PID获得对应的进程描述符指针 */
pidhash_init();
//初始化定时器Timer相关的数据结构
//http://www.ibm.com/developerworks/cn/linux/l-cn-clocks/index.html
init_timers();
//对高精度时钟进行初始化
hrtimers_init();
//软中断初始化
//http://blogold.chinaunix.net/u1/51562/showart_494363.html
softirq_init();
//初始化时钟源
timekeeping_init();
//初始化系统时间,
//检查系统定时器描述结构struct sys_timer全局变量system_timer是否为空,
//如果为空将其指向dummy_gettimeoffset()函数。
//http://www.ibm.com/developerworks/cn/linux/l-cn-clocks/index.html
time_init();
//profile只是内核的一个调试性能的工具,
//这个可以通过menuconfig中的Instrumentation Support->profile打开。
//http://www.linuxdiyf.com/bbs//thread-71446-1-1.html
profile_init();
/*if判断中断是否打开,如果已经打开,打印数据*/
if (!irqs_disabled())
printk(KERN_CRIT "start_kernel(): bug: interrupts were enabled early/n");
//与开始的early_boot_irqs_off相对应
early_boot_irqs_on();
//与local_irq_disbale相对应,开CPU中断
local_irq_enable();
/** HACK ALERT! This is early. We're enabling the console before
* we've done PCI setups etc, and console_init() must be aware of
* this. But we do want output early, in case something goes wrong.
*/
//初始化控制台以显示printk的内容,在此之前调用的printk,只是把数据存到缓冲区里,
//只有在这个函数调用后,才会在控制台打印出内容
//该函数执行后可调用printk()函数将log_buf中符合打印级别要求的系统信息打印到控制台上。
console_init();
if (panic_later)
panic(panic_later, panic_param);
//如果定义了CONFIG_LOCKDEP宏,那么就打印锁依赖信息,否则什么也不做
lockdep_info();
/*
* Need to run this when irqs are enabled, because it wants
* to self-test [hard/soft]-irqs on/off lock inversion bugs
* too:
*/
//如果定义CONFIG_DEBUG_LOCKING_API_SELFTESTS宏
//则locking_selftest()是一个空函数,否则执行锁自测
locking_selftest();
#ifdef CONFIG_BLK_DEV_INITRD
if (initrd_start && !initrd_below_start_ok &&
page_to_pfn(virt_to_page((void *)initrd_start)) < min_low_pfn) {
printk(KERN_CRIT "initrd overwritten (0x%08lx < 0x%08lx) - "
"disabling it./n", page_to_pfn(virt_to_page((void *)initrd_start)),
min_low_pfn);
initrd_start = 0;
}
#endif
/* 虚拟文件系统的初始化 */
vfs_caches_init_early();
cpuset_init_early();
mem_init();
/* slab初始化 */
kmem_cache_init();
//是否是对SMP的支持,单核是否需要??这个要分析
setup_per_cpu_pageset();
numa_policy_init();
if (late_time_init)
late_time_init();
//calibrate_delay()函数可以计算出cpu在一秒钟内执行了多少次一个极短的循环,
//计算出来的值经过处理后得到BogoMIPS 值,
//Bogo是Bogus(伪)的意思,MIPS是millions of instructions per second(百万条指令每秒)的缩写。
//这样我们就知道了其实这个函数是linux内核中一个cpu性能测试函数。
//http://blogold.chinaunix.net/u2/86768/showart_2196664.html
calibrate_delay();
//PID是process id的缩写
//http://blog.csdn.net/satanwxd/archive/2010/03/27/5422053.aspx
pidmap_init();
/* 接下来的函数中,大多数都是为有关的管理机制建立专用的slab缓存 */
pgtable_cache_init();
/* 初始化优先级树index_bits_to_maxindex数组 */
prio_tree_init();
//来自mm/rmap.c
//分配一个anon_vma_cachep作为anon_vma的slab缓存。
//这个技术是PFRA(页框回收算法)技术中的组成部分。
//这个技术为定位而生——快速的定位指向同一页框的所有页表项。
anon_vma_init();
#ifdef CONFIG_X86
if (efi_enabled)
efi_enter_virtual_mode();
#endif
//根据物理内存大小计算允许创建进程的数量
//http://www.jollen.org/blog/2006/11/jollen_linux_3_fork_init.html
fork_init(totalram_pages);
//给进程的各种资源管理结构分配了相应的对象缓存区
//http://www.shangshuwu.cn/index.php/Linux内核的进程创建
proc_caches_init();
//创建 buffer_head SLAB 缓存
buffer_init();
unnamed_dev_init();
//初始化key的management stuff
key_init();
//关于系统安全的初始化,主要是访问控制
//http://blog.csdn.net/nhczp/archive/2008/04/29/2341194.aspx
security_init();
//**`挂载sysfs文件系统和roofs文件系统`,`并创建了第一个挂载点目录:'/'`**
vfs_caches_init(totalram_pages);
radix_tree_init();
//创建信号队列
signals_init();
/* rootfs populating might need page-writeback */
//回写相关的初始化
//http://blog.csdn.net/yangp01/archive/2010/04/06/5454822.aspx \page_writeback_init();
#ifdef CONFIG_PROC_FS
proc_root_init();
#endif
//http://blogold.chinaunix.net/u1/51562/showart_1777937.html
cpuset_init();
进程状态初始化,实际上就是分配了一个存储线程状态的高速缓存
taskstats_init_early();
delayacct_init();
//测试CPU的各种缺陷,记录检测到的缺陷,以便于内核的其他部分以后可以使用他们工作。
check_bugs();
//电源相关的初始化
//http://blogold.chinaunix.net/u/548/showart.php?id=377952
acpi_early_init(); /* before LAPIC and SMP init */
//接着进入rest_init()创建init进程,创建根文件系统,启动应用程序
rest_init();
}
4. rest_init启动init进程流程
static noinline void __ref rest_init(void)
{
int pid;
rcu_scheduler_starting();
/*
* We need to spawn init first so that it obtains pid 1, however
* the init task will end up wanting to create kthreads, which, if
* we schedule it before we create kthreadd, will OOPS.
*/
kernel_thread(kernel_init, NULL, CLONE_FS);
numa_default_policy();
pid = kernel_thread(kthreadd, NULL, CLONE_FS | CLONE_FILES);
rcu_read_lock();
kthreadd_task = find_task_by_pid_ns(pid, &init_pid_ns);
rcu_read_unlock();
complete(&kthreadd_done);
/*
* The boot idle thread must execute schedule()
* at least once to get things moving:
*/
init_idle_bootup_task(current);
schedule_preempt_disabled();
/* Call into cpu_idle with preempt disabled */
cpu_startup_entry(CPUHP_ONLINE); 、、这里就是cpu_idle
}
-
rest_init中调用kernel_thread函数启动了2个内核线程,分别是:kernel_init和kthreadd
-
调用schedule函数开启了内核的调度系统,从此linux系统开始转起来了。
-
rest_init最终调用cpu_idle函数结束了整个内核的启动。也就是说linux内核最终结束了一个函数cpu_idle。这个函数里面肯定是死循环。
-
简单来说,linux内核最终的状态是:有事干的时候去执行有意义的工作(执行各个进程任务),实在没活干的时候就去死循环(实际上死循环也可以看成是一个任务)。
-
之前已经启动了内核调度系统,调度系统会负责考评系统中所有的进程,这些进程里面只有有哪个需要被运行,调度系统就会终止cpu_idle死循环进程(空闲进程)转而去执行有意义的干活的进程。这样操作系统就转起来了。
4.1 kernel_init
参考:https://blog.csdn.net/marshal_zsx/article/details/80230123
kernel_init最开始只是一个函数,这个函数作为进程被启动,但是之后它将读取根文件系统下的init程序,这个操作将完成从内核态到用户态的转变,而这个init进程是所有用户态进程的父进程,它生了大量的子进程,所以init进程将永远存在,其PID是1
static int __ref kernel_init(void *unused) //__ref 这个跟之前讲的__init作用一样
{
int ret;
kernel_init_freeable(); //进行init进程的一些初始化操作,检查init是否存在,如果有就不会注册其他的根文件系统,否则尝试挂载其他的根文件系统。打开/dev/console,文件号0,作为init进程标准输入
/* need to finish all async __init code before freeing the memory */
// 等待所有异步调用执行完成,,在释放内存前,必须完成所有的异步 __init 代码
async_synchronize_full();
// 释放所有init.* 段中的内存
free_initmem();
mark_readonly();
system_state = SYSTEM_RUNNING;// 设置系统状态为运行状态
numa_default_policy(); // 设定NUMA系统的默认内存访问策略
flush_delayed_fput();// 释放所有延时的struct file结构体
if (ramdisk_execute_command) {
//ramdisk_execute_command的值为"/init"
ret = run_init_process(ramdisk_execute_command);//运行根目录下的init程序
if (!ret)
return 0;
pr_err("Failed to execute %s (error %d)\n",
ramdisk_execute_command, ret);
}
/*
* We try each of these until one succeeds.
*
* The Bourne shell can be used instead of init if we are
* trying to recover a really broken machine.
*/
if (execute_command) {
//execute_command的值如果有定义就去根目录下找对应的应用程序,然后启动
ret = run_init_process(execute_command);
if (!ret)
return 0;
panic("Requested init %s failed (error %d).",
execute_command, ret);
}
//如果ramdisk_execute_command和execute_command定义的应用程序都没有找到,
//就到根目录下找 /sbin/init,/etc/init,/bin/init,/bin/sh 这四个应用程序进行启动
if (!try_to_run_init_process("/sbin/init") ||
!try_to_run_init_process("/etc/init") ||
!try_to_run_init_process("/bin/init") ||
!try_to_run_init_process("/bin/sh"))
return 0;
panic("No working init found. Try passing init= option to kernel. "
"See Linux Documentation/init.txt for guidance.");
}
- kernel_init_freeable //
进行init进程的一些初始化操作,初始化设备和驱动程序,打开/dev/console,文件号0,作为init进程标准输入,打开标准输入和输出 - run_init_process(ramdisk_execute_command) //
运行根目录下的init程序 - run_init_process(execute_command); 如果有定义就去根目录下找对应的应用程序,然后启动
- 如果ramdisk_execute_command和execute_command定义的应用程序都没有找到,
就到根目录下找 /sbin/init,/etc/init,/bin/init,/bin/sh 这四个应用程序进行启动,只要这些应用程序有一个启动了,其他就不启动了
kernel_init_freeable会调用do_basic_setup
static void __init do_basic_setup(void)
{
cpuset_init_smp();//针对SMP系统,初始化内核control group的cpuset子系统。
shmem_init();// 初始化共享内存
driver_init();// 初始化设备驱动,比较重要下面单独讲
init_irq_proc();//创建/proc/irq目录, 并初始化系统中所有中断对应的子目录
do_ctors();// 执行内核的构造函数
usermodehelper_enable();// 启用usermodehelper
//遍历initcall_levels数组,调用里面的initcall函数,这里主要是对设备、驱动、文件系统进行初始化,之所有将函数封装到数组进行遍历,主要是为了好扩展
do_initcalls();
random_int_secret_init();//初始化随机数生成池
}
driver_init
void __init driver_init(void)
{
/* These are the core pieces */
devtmpfs_init();// 注册devtmpfs文件系统,启动kdevtmpfs进程
devices_init();// 初始化驱动模型中的部分子系统,kset:devices 和 kobject:dev、 dev/block、 dev/char
buses_init();// 初始化驱动模型中的bus子系统,kset:bus、devices/system
classes_init();// 初始化驱动模型中的class子系统,kset:class
firmware_init();// 初始化驱动模型中的firmware子系统 ,kobject:firmware
hypervisor_init();// 初始化驱动模型中的hypervisor子系统,kobject:hypervisor
/* These are also core pieces, but must come after the
* core core pieces.
*/
// 初始化驱动模型中的bus/platform子系统,这个节点是所有platform设备和驱动的总线类型,即所有platform设备和驱动都会挂载到这个总线上
platform_bus_init();
cpu_dev_init();// 初始化驱动模型中的devices/system/cpu子系统,该节点包含CPU相关的属性
memory_dev_init();//初始化驱动模型中的/devices/system/memory子系统,该节点包含了内存相关的属性,如块大小等
container_dev_init();//初始化系统总线类型为容器
of_core_init();//初始化创建,访问和解释设备树的过程。
}
这个函数完成驱动子系统的构建,实现了Linux设备驱动的一个整体框架,但是它只是建立了目录结构,具体驱动的装载是在do_initcalls函数,kernel_init_freeable函数告一段落了
4.2 kthreadd
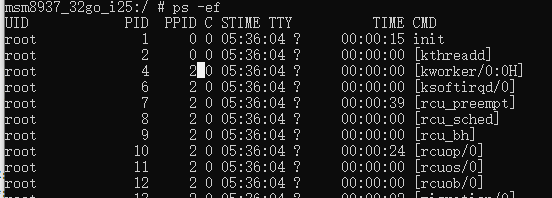
Linux下有3个特殊的进程,idle进程(PID = 0), init进程(PID = 1)和kthreadd(PID = 2)
- idle进程由系统自动创建, 运行在内核态,在start_kernel创建
- idle进程其pid=0,
其前身是系统创建的第一个进程,也是唯一一个没有通过fork或者kernel_thread产生的进程。完成加载系统后,演变为进程调度、交换
- idle进程其pid=0,
- init进程由idle通过kernel_thread创建,在内核空间完成初始化后, 加载init程序, 并最终用户空间
由0进程创建,完成系统的初始化.是系统中所有其它用户进程的祖先进程。Linux中的所有进程都是有init进程创建并运行的。首先Linux内核启动,然后在用户空间中启动init进程,再启动其他系统进程。在系统启动完成完成后,init将变为守护进程监视系统其他进程。
- kthreadd进程由idle通过kernel_thread创建,并始终运行在内核空间,
负责所有内核线程的调度和管理- 它的任务就是
管理和调度其他内核线程kernel_thread, 会循环执行一个kthreadd的函数,该函数的作用就是运行kthread_create_list全局链表中维护的kthread, 当我们调用kernel_thread创建的内核线程会被加入到此链表中,因此所有的内核线程都是直接或者间接的以kthreadd为父进程
- 它的任务就是
任何一个内核线程入口都是 kthread()
通过 kthread_create() 创建的内核线程不会立刻运行.需要手工 wake up.
通过 kthread_create() 创建的内核线程有可能不会执行相应线程函数threadfn而直接退出
总结:
linux的内核启动分为:
1. 自解压内核映像(上电uboot引导)
2. head.S(内核引导阶段)
3. start_kernel(内核的第一个c函数)——会去挂载sysfs文件系统和roofs文件系统(根文件系统)
4. kernel_init启动init进程
5. kthreadd管理和调度其他内核线程kernel_thread
Linux系统的init进程在内核初始化完成后,就直接通过run_init_process函数执行init可执行文件,该可执行文件的源代码在system/core/init/init.cpp,下一篇文章中我将以这个文件为入口,分析Android系统的init进程启动过程。