Lec7~8
1、Reflective Shadow Maps(RSM)
RSM是一个特别经典的计算全局光照的方法,前置基础知识为:辐射度量学+光线追踪原理
全局光照(Global Illumination)= 直接光照 + 间接光照
计算着色点 p p p 间接光照的步骤(2-pass)
-
找出被光源直接照亮的面片
(surface patch)- 用
shadow mapping,每个纹素都对应空间中的一块离散的面片 - 对于每个直接照亮的面片 q q q,需要知道对于它来说直接光的出射方向。这个方向不是相机的方向,而是目标着色点 p的方向,并且我们不知道q点的brdf。因此需要做个假设:
被光源直接照亮的反射物是diffuse的
- 用
-
把每个面片当做新的光源,计算每个间接光源反射到 p p p 点的能量为多少
- 考虑在之前101中提到的对光源直接采样
- 积分换元、间接光源的面片所覆盖的立体角上的积分变为直接对光源面片范围做积分
- 最难的是渲染方程中的
Visibility项,即在当前的微元方向上,p、q点之间是否有障碍物。因为p的间接光计算并不只是算某一个间接光源,而是很多个分布在半球各个地方的间接光源。每个p点生成一个shadow map 这不仅不现实,甚至还不够。。半球上得多少张shadowmap才能覆盖啊?所以不好算,解决方式为: 不算
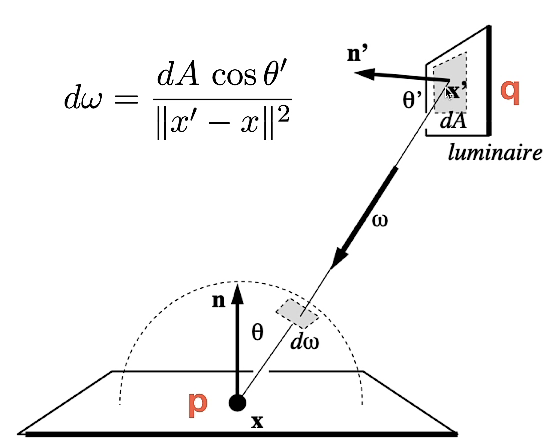
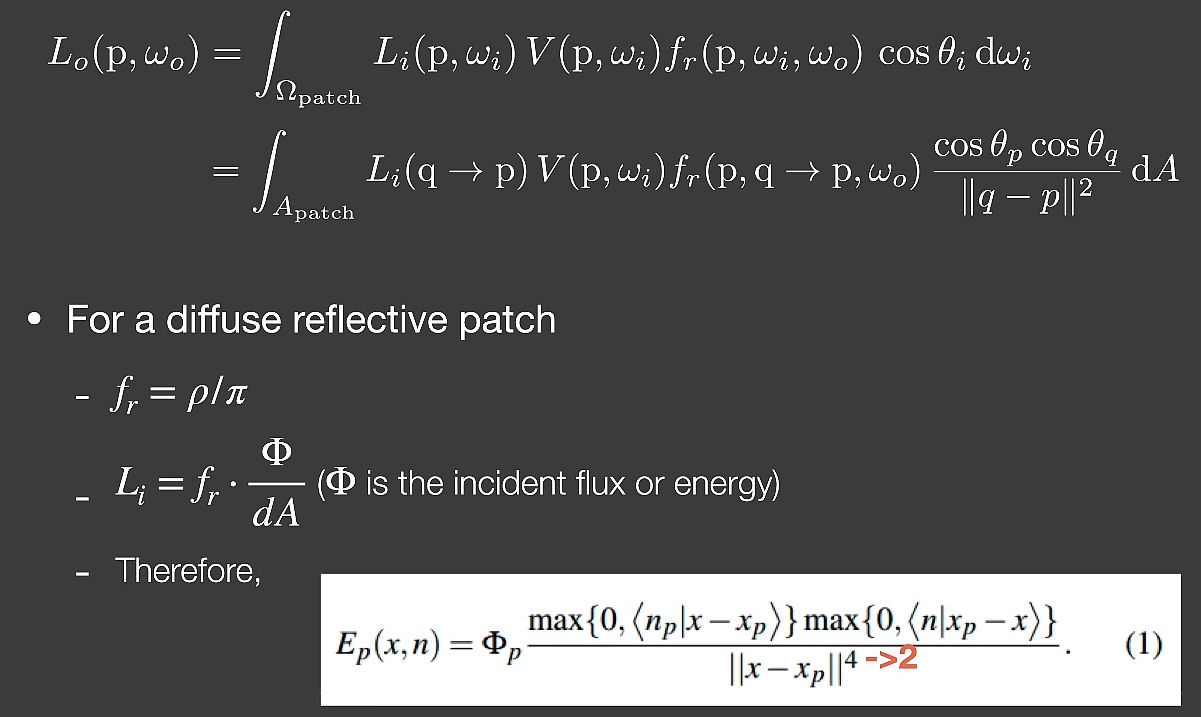
下面公式中,就体现了上面描述的过程,要注意的是
- 公式是计算p点的着色结果, L i ( p , ω i ) L_i(p,ω_i) Li(p,ωi)才是次级光源反射过来的光
- 因为我们假设所有次级光源的面片都是diffuse的,所以 L i = ρ π ⋅ Φ d A \displaystyle L_i=\frac{ρ}{π}·\frac{\Phi}{dA} Li=πρ⋅dAΦ , ρ π \displaystyle\frac{ρ}{π} πρ为diffuse的BRDF, Φ d A \displaystyle \frac{\Phi}{dA} dAΦ为次级光源所接受到的irradiance
- 论文中的公式分母的幂次错误,4应该改为2。(其实没错,闫老师吃键盘)
到此,一个次级光源传递到着色点的能量就算出来了
如何计算有哪些次级光源能影响到目标着色点?—— 在光源处的shadow map上,取着色点附近的某一堆纹素所对应的场景的面片作为能够影响到着色点的次级光源
- 依然不考虑可见性,即次级光源是否被某些障碍物挡住
- 不考虑着色点所在面片的朝向
- 不考虑次级光源与着色点的实际距离
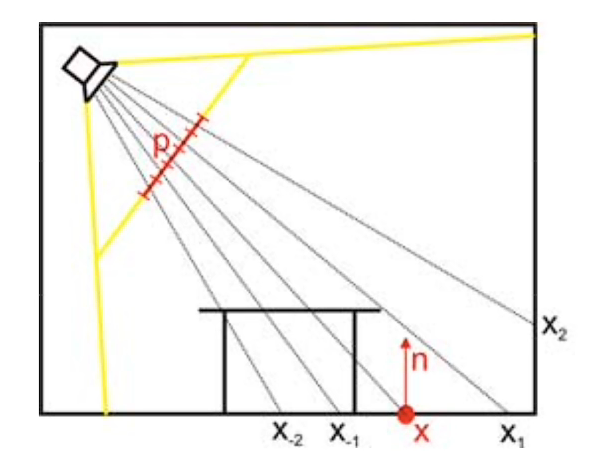
- 如下图所示,注意与课程中的符号不同,图中着色点为 x x x,其在shadow map上对应的点为p,而p点周围的纹素对应到场景中的次级光源面片为 x − 2 , x − 1 , x 1 , x 2 x_{-2},x_{-1},x_1,x_2 x−2,x−1,x1,x2
- 以 x − 1 x_{-1} x−1为例,对应在shadow map上的纹素,记录的应该是个桌子,这桌子上的这个间接光源是根本不可能照亮x的
2、Light Propagation Volumes(LPV)
直接光照还是照常计算,LPV方法来解决 实时间接光照计算。细节太多,代码实现比较难,下面记录主要思想
关键问题:快速查询到任何一个着色点的来自任何方向的间接光radiance(废话)
关键思想:radiance在空间中传播的过程中不会改变
关键方法:使用空间中的一个个3D的格子来传输从间接光源发射出来的radiance
把场景切分为一个个网格(简单的划分格子,并不涉及层次结构)如下图所示,红色部分就是间接光源反射出来的radiance。想要知道任何一个格子接收到的radiance是多少,应该怎么算?

算法步骤(4-pass)
-
生成: 找到场景中接收到直接光照的次级光源
Virtual Light Sources(VLS)(同RSM的第一步shadow map,多少光源就做多少张shadow map,最终采样一部分VLS即可) -
注入: 把场景预处理为3D格子(3D纹理),遍历每个格子,把这些次级光源注入最近的格子内。这些格子记录的是VLS向四面八方辐射出的能量分布,因此可以用SH基函数来压缩记录(通常选用4个来大概的表示)。既然用了SH函数,也就假设了次级光源面片为diffuse

-
传播(Propagation ): 从记录着VLS的格子上,往周围6个格子传播radiance(按分布情况进行分配), 下图所示依次为向右、左、上、下传播的情况,接收到能量的格子依然用SH来表示。重复所有格子的传播,直至稳定(通常迭代4~5次)。迭代结束后,空间中每个格子的能量分布情况就已知了

-
着色计算: 每个着色点所在格子的
radiance入射分布已知,解一个渲染方程即可
算法缺陷
- 如下所示,p点为VLS,它不应该照亮墙体的反面,但是在LPV算法下,只要这个墙比格子的划分粒度还小,则会被照亮。很简单,因为在LPV算法中认为,每个格子内的着色点所接收到的radiance分布一致。也就是背面的点因为跟p在同一个格子内,在着色计算时就会用p点的反射出去的radiance来计算着色,就会被照亮
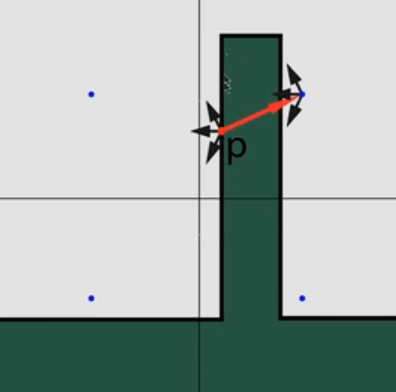
- 因此不可以免的会有下面这种
Light leaking现象,格子不可能无限的小,计算量受不了

3、Voxel Global Illumination(VXGI)
与RSM一样,是2-pass算法

VXGI与前两个算法(RSM,LPV)的区别
- 在RSM中,shadow map上的每个像素代表的都是场景中的次级光源表面。在VXGI中,整个场景完全
体素化,并且是树状带层级关系的 - VXGI的第二趟是从相机出发,打到像素上,然后以锥形向外反射
(cone tracing),锥形会相交到体素化的场景中的VLS(虚拟光源),这些体素对着色点的贡献就能算出来。此过程与其他算法的区别如下- RSM中做了很多假设,比如次级光源全部看做diffuse材质、不考虑实际次级光源到着色点距离等,因此RSM很不准确
- LPV中的次级光源完成注入后,仅做
一次传输,即可得到所有着色点的入射radiance分布,快但不准 - VXGI需要每个着色点向外进行锥形探测,因此速度会慢很多,但是着色结果比较准确
VXGI算法步骤
- pass 1: Light pass
- 找到哪些体素会被光源 直接照亮
- 对于这些体素,存储入射光分布,以及本纹素内所有面片的法线分布。(注意区别于LPV只存入射分布)
- 已知入射光分布方向,以及法线的分布方向,就能够算出不同材质(glossy diffuse)下的表面的 出射光方向分布。这样确实会比RSM直接假设次级表面为diffuse要准
- 更高层级的体素,就统计他下面所有的小体素的入射、法线分布,形成对于当前层级的体素所包含的所有微表面的入射、法线分布,有点类似MIPMAP的思想
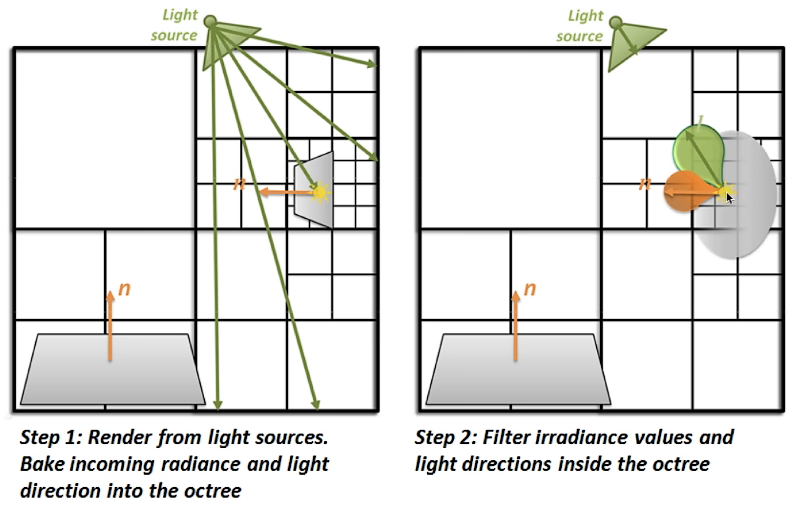
- pass 2: camera pass
- 对于glossy表面来说,一根光线,反射后变成一个圆锥
- 暴力一点就直接用椎体与场景所有的体素求交,每个体素都有入射光、法线分布,因此对于任意一个点的反射的radiance就能够算出来,将所有体素对于着色点方向的radiance加起来就成。这么暴力就很
慢 - 因为树状层级关系的存在,巧了不是,还就是MipMap的思想,根据圆锥越来越大的覆盖范围,直接查询树状结构存放的体素信息,直接查高层的体素,就很快
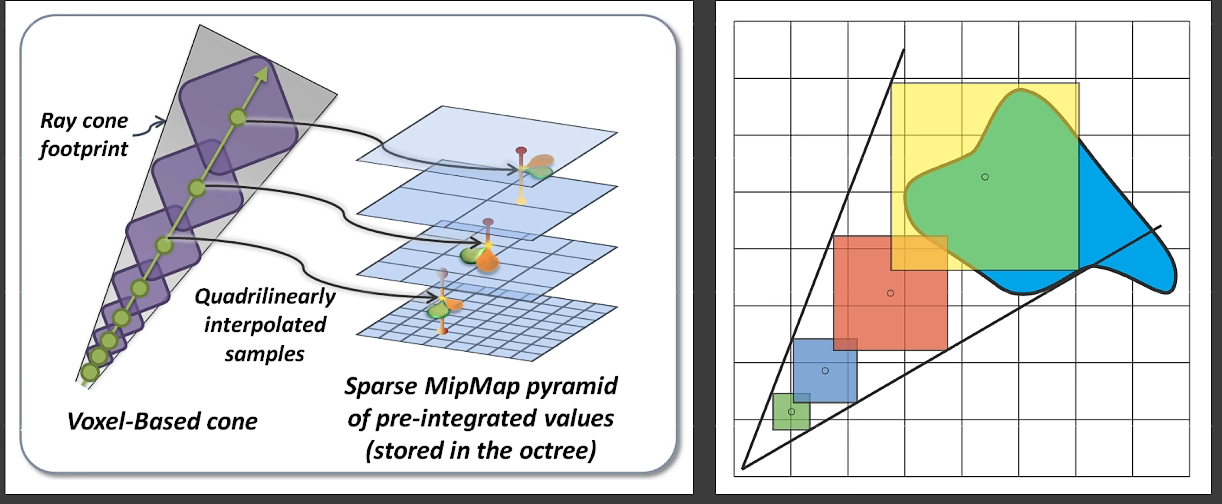
- 对于diffuse表面,则反射多个圆锥即可

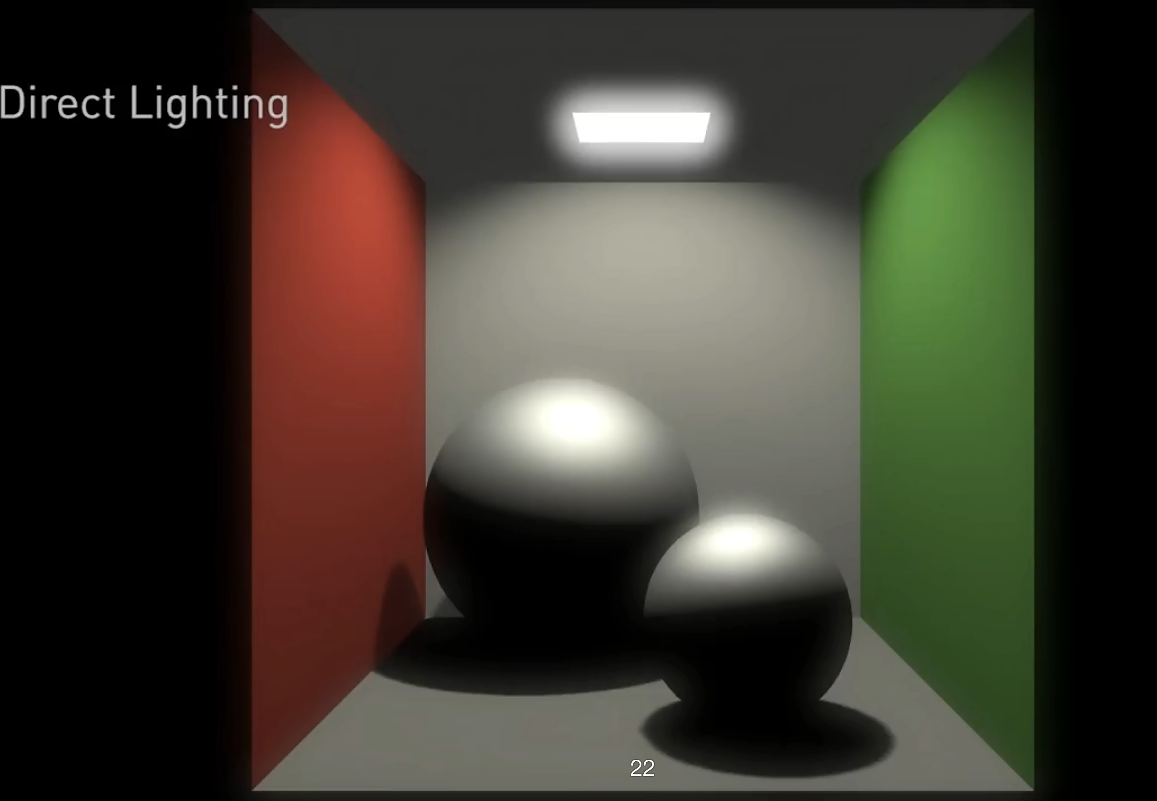
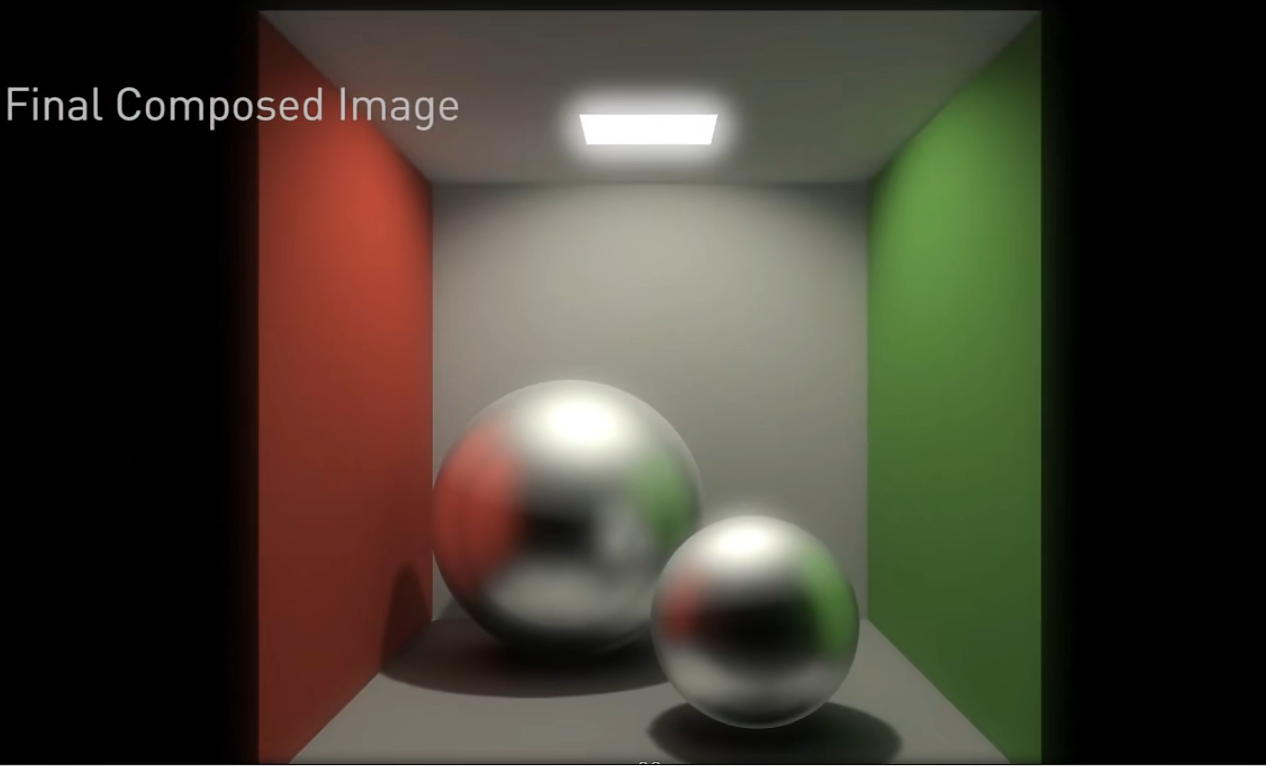
效果:非常不错,很接近与路径追踪的渲染结果了
- 直接光照部分
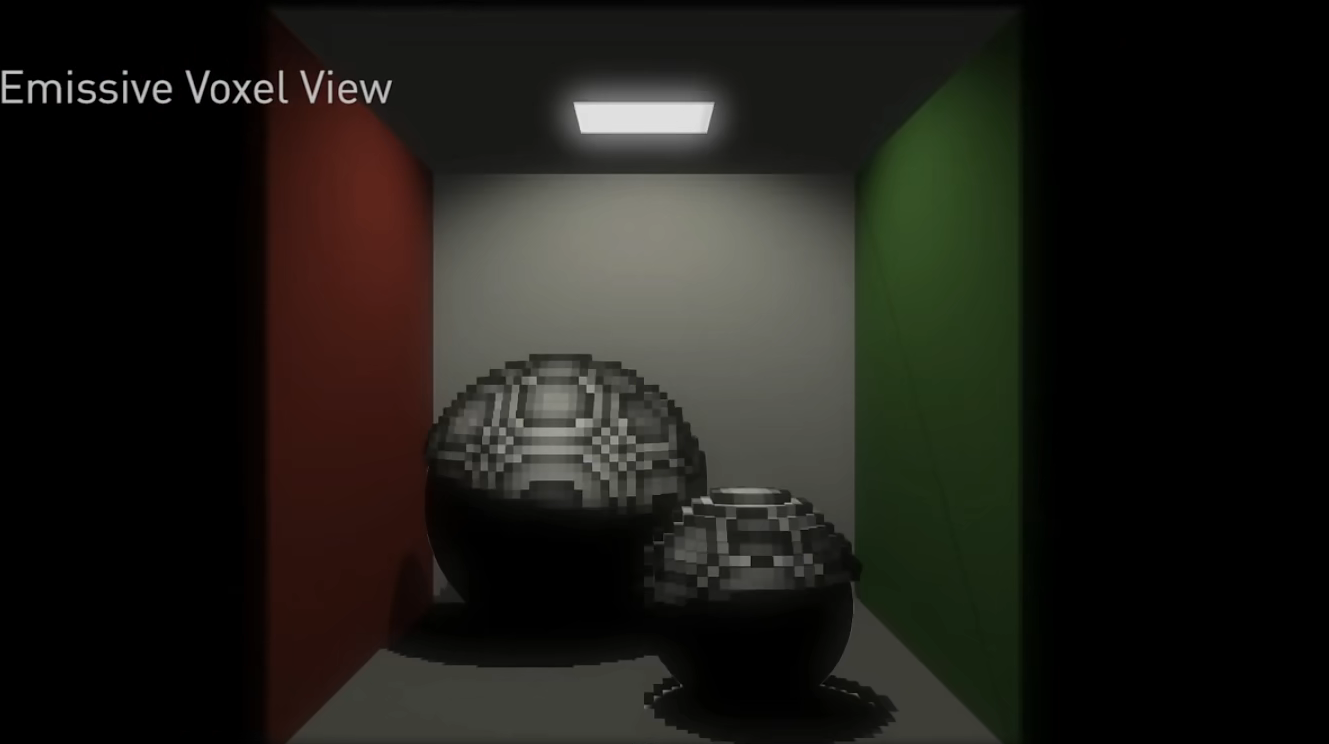
- 体素可视化

- 每个体素存放的经过计算后的反射分布可视化(应该是吧。。不太确定哈)
- 间接光照渲染结果
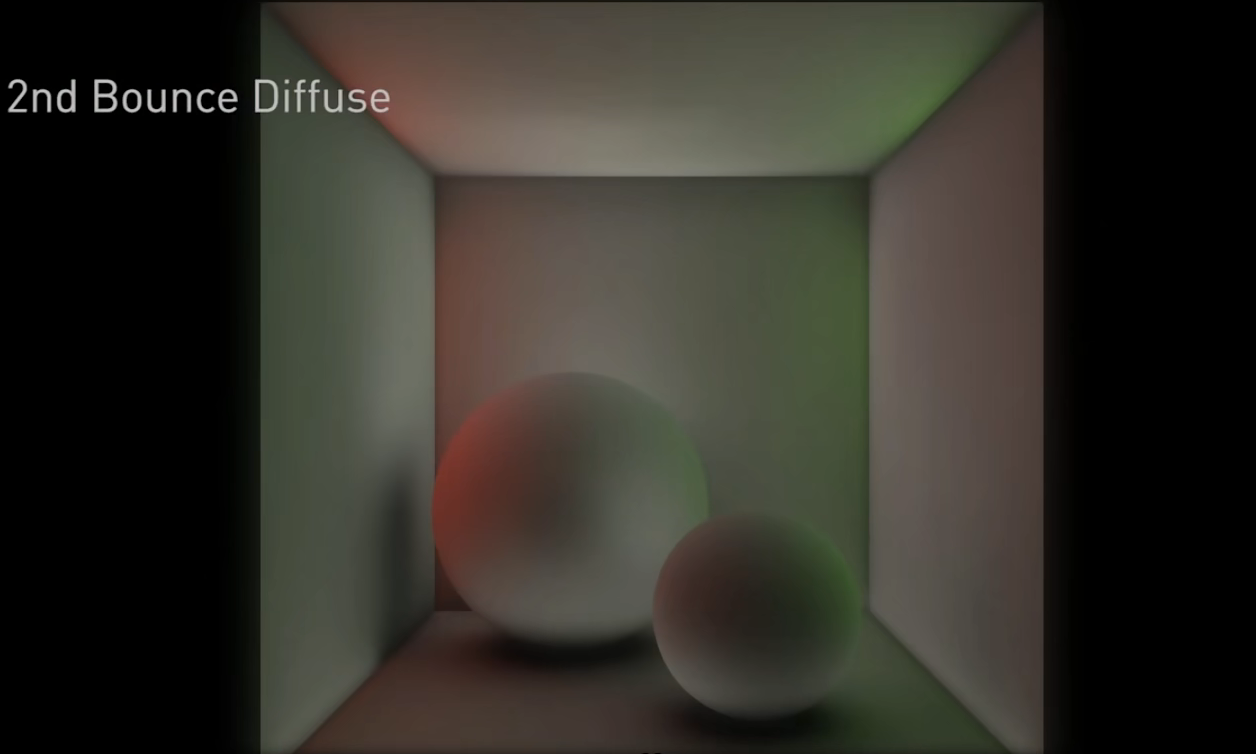
- 最终全局光照结果
VXGI大概是2012年发表的,效果不错,但是 开销太大
- 场景的体素化,计算量太大,甚至需要预处理
- 对于动态物体的实时体素化是很难算的
- 这个算法的步骤,很类似于离线渲染中的Photon Mapping了,所以 确实慢