文章目录
Multi-Camera Color Correction via Hybrid Histogram Matching
这是一篇直方图匹配的论文,通过直方图匹配达到颜色转换的目的。
主要分为2个步骤:
1个是全局的直方图匹配
2是局部颜色的调整(把累计直方图的直角展开)
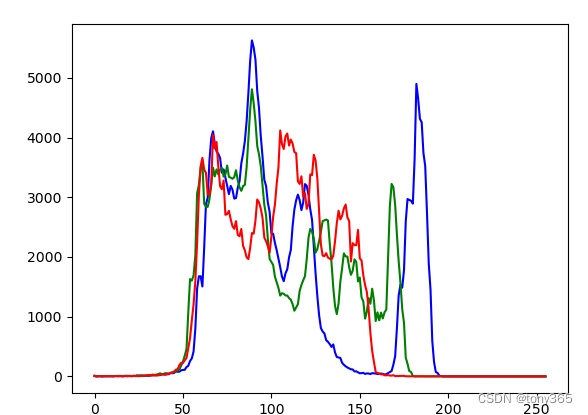
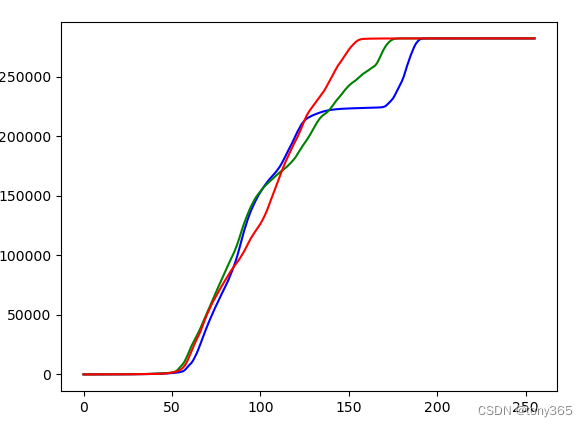
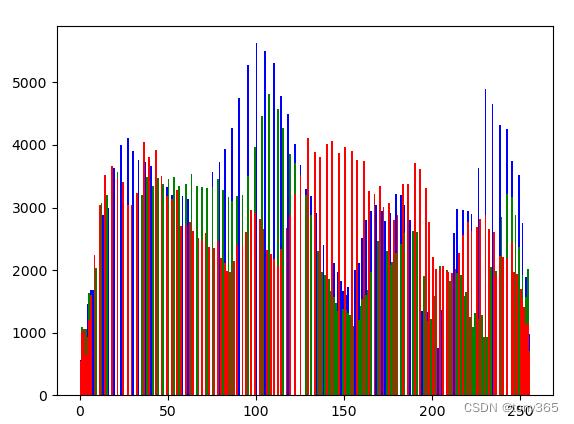
1. 计算直方图, 累计直方图, 直方图均衡化
直方图
累计直方图
直方图均衡化后的直方图
import cv2
import numpy as np
from matplotlib import pyplot as plt
def cal_hist(img):
'''
:param img: single channel image
:return: hist
'''
hist, hist_edge = np.histogram(img, bins=256, range=[0, 256])
# for i in range(256):
# hist[i] = np.count_nonzero(img==i)
# print(hist_edge)
return hist
def cal_cum_hist(hist):
cum_hist = np.zeros_like(hist)
for i in np.arange(1, 256):
cum_hist[i] = cum_hist[i-1] + hist[i]
return cum_hist
def cal_hist_equalize(img):
'''
:param img: single channel image
:return:
'''
h, w = img.shape
hist = cal_hist(img)
cum_hist = cal_cum_hist(hist)
lut = 255 * cum_hist / (h * w)
lut = (lut + 0.5).astype(np.uint8)
out = lut[img]
return out, lut
2. 直方图规定化,直方图映射。
即将图像一 的直方图 映射为 图像二的直方图,使图像一的色彩接近图像二
def cal_hist_map(img, tgt_img):
out1, lut1 = cal_hist_equalize(img)
out2, lut2 = cal_hist_equalize(tgt_img)
lut_invert = np.zeros_like(lut2)
# 反转
lut_invert = np.ones_like(lut2) * -1
for i in range(0, 256):
i = 255 - i # lut2[i]可能对应很多重复的i, 赋值为最小的一个。
lut_invert[lut2[i]] = i
# lut_invert 可能会有一些空缺点, 通过插值填充。
if lut_invert[0] == -1:
lut_invert[0] = lut_invert.min()
if lut_invert[255] == -1:
lut_invert[255] = lut_invert.max()
xx = []
yy = []
xxx = []
for i in range(0, 256):
if lut_invert[i] != -1:
xx.append(i)
yy.append( lut_invert[i])
else:
xxx.append(i)
lut_invert[lut_invert==-1] = np.interp(xxx, xx, yy)
# 通过插值填充 或这 直接赋值
# for i in range(1, 256):
# if lut_invert[i] == -1:
# lut_invert[i] = lut_invert[i-1]
lut = np.zeros_like(lut1)
for i in range(256):
lut[i] = lut_invert[lut1[i]]
out = lut[img]
return out, lut
3. 实验环节
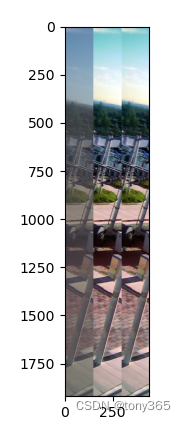
3.1 输入图像
来源:原论文仓库

3.2 均衡化效果
直方图均衡化本文代码和opencv效果对比,基本一致:
3.3 映射效果
直方图映射效果:看起来还行
实际应用到大图的时候出现伪影:
4. 针对3实验环节的伪影 做处理和优化,就是HMM这篇论文的目的
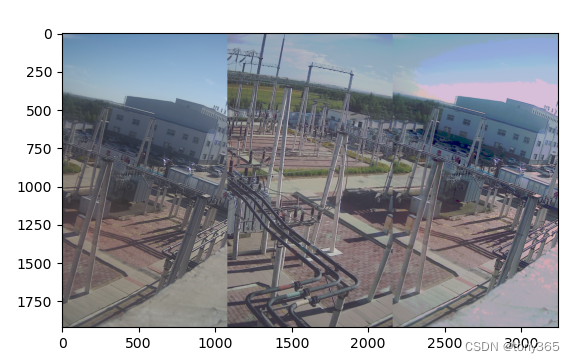
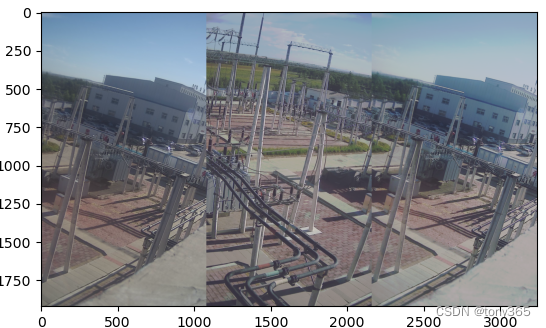
复现的效果:
左中右分别为, 图1,图2,映射后的图1(色调接近图2)
过滤噪声(数目比较少的值,累计直方图可能出现横线的地方)后,插值前的查找表:
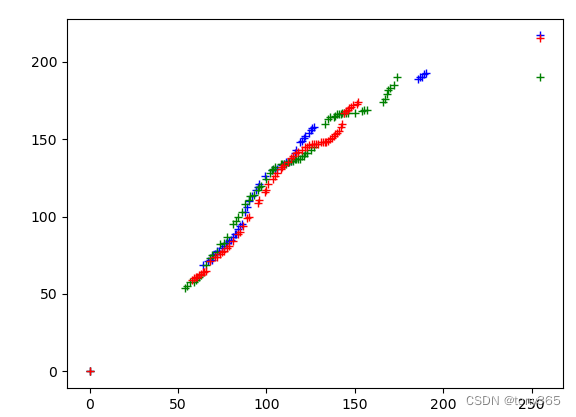
插值后:
更多实验图像可以运行下面的代码:
import cv2
import numpy as np
from matplotlib import pyplot as plt
from scipy.signal import savgol_filter
from python.hist_equalize import cal_hist_equalize, cal_hist, cal_cum_hist
def cal_noisy_index(hist1, h1, w1):
'''找出 噪声的 index,这些值需要重新插值'''
ts = [] # remove noise index
sort_index = np.argsort(hist1)
#print('sort value:', hist1[sort_index])
s = 0
for i in range(len(sort_index)):
t = sort_index[i]
s += hist1[t]
if s < 0.05 * (h1 * w1):
ts.append(t)
#print('ts num:', len(ts))
return ts
def cal_hist_map2(img, tgt_img):
h1, w1 = img.shape
h2, w2 = tgt_img.shape
hist1 = cal_hist(img)
cum_hist1 = cal_cum_hist(hist1)
hist2 = cal_hist(tgt_img)
cum_hist2 = cal_cum_hist(hist2)
lut1 = 255 * cum_hist1 / (h1 * w1)
lut1 = (lut1 + 0.5).astype(np.uint8)
lut2 = 255 * cum_hist2 / (h2 * w2)
lut2 = (lut2 + 0.5).astype(np.uint8)
print('lut2:', lut2)
lut_invert = np.ones_like(lut2) * -1
for i in range(0, 256):
i = 255 - i # lut2[i]可能对应很多重复的i, 赋值为第一个。
lut_invert[lut2[i]] = i
# lut_invert 可能会有一些空缺点, 通过插值填充。
if lut_invert[0] == -1:
lut_invert[0] = lut_invert.min()
if lut_invert[255] == -1:
lut_invert[255] = lut_invert.max()
xx = []
yy = []
xxx = []
for i in range(0, 256):
if lut_invert[i] != -1:
xx.append(i)
yy.append(lut_invert[i])
else:
xxx.append(i)
lut_invert[lut_invert == -1] = np.interp(xxx, xx, yy)
# 通过插值填充 或这 直接赋值
# for i in range(1, 256):
# if lut_invert[i] == -1:
# lut_invert[i] = lut_invert[i-1]
lut = np.zeros_like(lut1)
for i in range(256):
lut[i] = lut_invert[lut1[i]]
# min_val = tgt_img.min()
# max_val = tgt_img.max()
# lut = np.clip(lut, min_val, max_val)
'''找出 噪声的 index,这些值需要重新插值'''
ts = cal_noisy_index(hist1, h1, w1)
ts += cal_noisy_index(hist2, h2, w2)
ts = np.unique(ts)
xx = []
yy = []
xx.append(0)
yy.append(lut[0]) # xx, yy的选择也很重要, 可以设为0
lut_ret = lut.copy()
for i in range(1, 255):
if i not in ts:
xx.append(i)
yy.append(lut[i])
xx.append(255)
yy.append(lut[-1]) # xx, yy的选择也很重要, 也可以设为255看下效果
lut_ret[ts] = np.interp(ts, xx, yy )
lut_ret2 = (np.array(lut_ret).astype(np.int16) + np.array(lut)) / 2 + 0.5
lut_ret = lut_ret.astype(np.uint8)
for i in range(len(lut)):
print(lut[i], lut_ret[i])
plt.figure()
x = range(256)
plt.title('origin lut and interp lut')
plt.plot(x, lut, 'r.', x, lut_ret, 'b-', x, ((lut_ret.astype(np.int16) + lut) / 2), 'y')
plt.show()
# smooth with savgol_filter
lut_ret = savgol_filter(lut_ret, 15, 1)
out = lut_ret[img]
return out, lut_ret, xx, yy
def process(file1, file2, file3, file4):
# file1 = r'D:\code_color\HHM-master\6to7\6to7.png'
# file2 = r'D:\code_color\HHM-master\6to7\7to6.png'
img1 = cv2.imread(file1, 1)
img = img1.copy()
img2 = cv2.imread(file2, 1)
out, lut0, xx0, yy0 = cal_hist_map2(img1[..., 0], img2[..., 0])
out, lut1, xx1, yy1 = cal_hist_map2(img1[..., 1], img2[..., 1])
out, lut2, xx2, yy2 = cal_hist_map2(img1[..., 2], img2[..., 2])
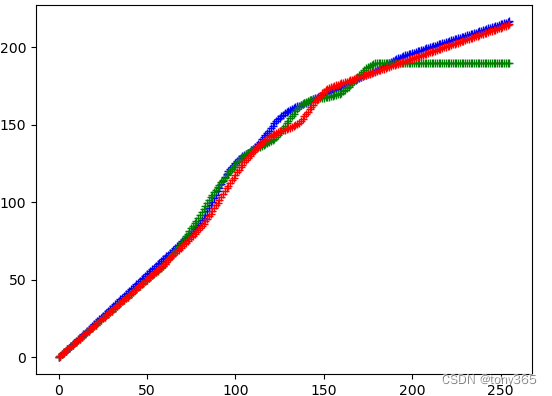
plt.figure()
x = np.arange(256)
plt.plot(x, lut0, 'b+')
plt.plot(x, lut1, 'g+')
plt.plot(x, lut2, 'r+')
plt.show()
plt.figure()
plt.plot(xx0, yy0, 'b+')
plt.plot(xx1, yy1, 'g+')
plt.plot(xx2, yy2, 'r+')
plt.show()
# file3 = r'D:\code_color\HHM-master\6to7\6.png'
# file4 = r'D:\code_color\HHM-master\6to7\7.png'
img1 = cv2.imread(file3, 1)
img = img1.copy()
img2 = cv2.imread(file4, 1)
img1[..., 0] = lut0[img1[..., 0]]
img1[..., 1] = lut1[img1[..., 1]]
img1[..., 2] = lut2[img1[..., 2]]
cv2.imwrite(file3[:-4] + '_my.png', img1)
plt.figure()
plt.imshow(np.hstack((img, img2, img1))[..., ::-1])
plt.show()
if __name__ == "__main__":
file2 = r'D:\code_color\HHM-master\data1\4to5.png'
file1 = r'D:\code_color\HHM-master\data1\5to4.png'
file4 = r'D:\code_color\HHM-master\data1\4.png'
file3 = r'D:\code_color\HHM-master\data1\5.png'
# file2 = r'D:\code\3dlut\lut1.png'
# file1 = r'D:\code\3dlut\lut2.png'
# file4 = r'D:\code\3dlut\lut1.png'
# file3 = r'D:\code\3dlut\lut2.png'
file2 = r'D:\code_color\HHM-master\6to7\6to7.png'
file1 = r'D:\code_color\HHM-master\6to7\7to6.png'
file4 = r'D:\code_color\HHM-master\6to7\6.png'
file3 = r'D:\code_color\HHM-master\6to7\7.png'
process(file1, file2, file3, file4)