由四川省教育厅批准,电子科技大学主办、航空航天学院承办的2022年第二届四川省大学生未来飞行器挑战赛,自3月启动以来,受到了省内各高校的关注,阿木实验室作为大赛技术支持方,为给参赛队员提供更全面的指导,也陆续开展了线上理论培训以及仿真demo展示,感兴趣的朋友可以点击查看往期内容。
在近半年的备赛及决赛选拔中,优秀的获奖队伍一一出炉,今天为大家分享本届大赛中实践类赛道一等奖排名第一的队伍,来自西南交通大学的“ 铁道游击队”
决赛作品展示
西南交通大学-铁道游击队
团队及导师介绍
祝洋 | 指导老师西南交通大学助理教授
博士毕业于电子科技大学,长期以理论与工程紧密结合的方式开展无人机、运动体和集群的(多源)抗干扰控制技术 研究、验证与应用。目前已在TIM、IJRNC等期刊发表SCI论文5篇(其中包括IJRNC封面论文一篇),会议论文6篇(其中两篇分别获得ICCA2018和GNCC2018两个会议的Best Paper Finalist) 。
闫连山 | 指导老师西南交通大学教授、博导
西南交通大学信息科学与技术学院院长,国家杰出青年基金获得者,教育部长江学者特聘教授,国家万人计划创新人才。本科和博士分别毕业于浙江大学和美国南加州大学,发表论文500余篇,其中SCI收录350多篇,包括10多篇特邀综述论文;国际会议特邀报告50多次,任共同主席或委员30多次;拥有13项美国和40多项中国发明专利。
向诗语(队长) :西南交通大学信息科学与技术学院本科三年级
郑志远 :西南交通大学信息科学与技术学院本科三年级
朱泉冰 :西南交通大学信息科学与技术学院本科二年级
经验分享
在比赛准备过程中,我们也曾遇到各种各样的困难,在老师的指导和帮助下,小组成员积极应对、努力解决,最终完成了比赛,以下将分享我们备赛期间的一些问题及解决办法。
-
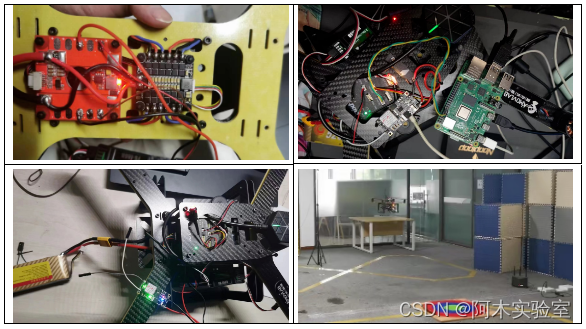
硬件部分:该赛道中我们使用的是阿木实验室的“ Z410-4B”无人机,比赛规则中要求给无人机加装树莓派和抛投器,由于飞控不能直接给抛投器和树莓派供电,因此我们使用了两个5v降压模块从电源处分出电来供电。在固件的选择上,我们先是采用了PX4固件,但是在测试过程中飞机定位不准确,频繁发生飘逸现象,随后我们又改用APM固件,该问题得到解决。
-
UWB定位:比赛中我们采用了UWB定位方式。在室内使用UWB进行定位时,无人机的定位信息存在很大误差(误差约为20cm),对无人机的飞行甚至解锁都存在着干扰。经过我们不断的实验测试,我们发现当在室外使用UWB时,相较于室内有着更好的定位效果(误差约为10cm),推测可能是因为室内墙体反射信号或无线电信号的干扰所导致的。同时,对于UWB基站的摆放,我们将四个基站摆放为边长10m左右的正方形,借此来提高定位的精度。UWB采用基站 0 和基站 3 正东朝向,基站 0 和基站 1 正北朝向,这样NAssistant中东朝向为x轴,北朝向y轴,方便我们更好地观测无人机轨迹。
-
代码部分:无人机如何识别标靶这一问题一直困扰着我们,在阿木实验室的培训指导下,我们最终采用相机加灰度识别的方法来作为视觉部分,进而确定标靶的位置。在编写代码时,尤其需要注意Python版本。一开始我们使用Python3运行脚本,导致我们测试时经常遇到树莓派连接飞控超时的情况,影响比赛进度。后来,当我们尝试用Python2运行脚本之后,树莓派与飞控的连接就稳定了。
-
实测过程:在实际操作中无人机失控急救也是一大重要问题,通过给遥控器设置一键炸机模式和关闭遥控器自动切换自动返航模式可以得以解决。
除上述问题之外,还有如树莓派散热、电池电压不稳定影响测试精度等诸多小问题,在两位指导老师以及阿木实验室的帮助下得以一一解决。
参赛感想
此次比赛能够获奖,首先要感谢祝洋老师,从备赛到最后作品提交,他都耐心地解答我们遇到的疑惑,为我们的测试工作做保障、为参赛作品把关。此外还要感谢阿木实验室,在备赛阶段为我们提供了无人机基础培训,使得我们快速掌握无人机的基础知识。整个参赛过程中确实比较辛苦,小组成员也都花了不少课余时间来完成比赛,在解决问题的过程中,锻炼了我们动手实践的能力,培养了我们认真求索、勇于尝试、积极应对、团队协作等品质。