目录
一、理论基础
粒子群算法是在1995年由Eberhart博士和Kennedy博士一起提出的,它源于对鸟群捕食行为的研究。它的基本核心是利用群体中的个体对信息的共享从而使整个群体的运动在问题求解空间中产生从无序到有序的演化过程,从而获得问题的最优解。设想这么一个场景:一群鸟进行觅食,而远处有一片玉米地,所有的鸟都不知道玉米地到底在哪里,但是它们知道自己当前的位置距离玉米地有多远。那么找到玉米地的最佳策略,也是最简单有效的策略就是搜寻目前距离玉米地最近的鸟群的周围区域。
在PSO中,每个优化问题的解都是搜索空间中的一只鸟,称之为"粒子",而问题的最优解就对应于鸟群中寻找的"玉米地"。所有的粒子都具有一个位置向量(粒子在解空间的位置)和速度向量(决定下次飞行的方向和速度),并可以根据目标函数来计算当前的所在位置的适应值(fitness value),可以将其理解为距离"玉米地"的距离。在每次的迭代中,种群中的例子除了根据自身的经验(历史位置)进行学习以外,还可以根据种群中最优粒子的"经验"来学习,从而确定下一次迭代时需要如何调整和改变飞行的方向和速度。就这样逐步迭代,最终整个种群的例子就会逐步趋于最优解。
在PSO中,群中的每个粒子表示为向量。在投资组合优化的背景下,这是一个权重向量,表示每个资产的分配资本。矢量转换为多维搜索空间中的位置。每个粒子也会记住它最好的历史位置。对于PSO的每次迭代,找到全局最优位置。这是群体中最好的最优位置。一旦找到全局最优位置,每个粒子都会更接近其局部最优位置和全局最优位置。当在多次迭代中执行时,该过程产生一个解决该问题的良好解决方案,因为粒子会聚在近似最优解上。
Ray等人通过将PSO算法和Pareto排序机制想结合起来。采用Pareto排序法来选择一组精英解,全局最优粒子的选择则是采用轮盘赌方式从中选择。实际运行时,只有少量的个体选择概率大,种群多样性保持不好。Coello等在PSO算法中选择群体最佳位置则是通过引入Pareto竞争机制和微粒知识库。该知识库用于存储微粒在每次飞行循环后的飞行经验,知识库的更新是通过考虑一个基于地理学的系统,该系统是就每个微粒的目标函数值而言来定义的。这个知识库被微粒用来确定一个指导搜索的领导者。同时非劣解的确定是通过将候选个体与从种群中随机选出的比较集进行比较,因此比较集的参数对算法成功与否有着至关重要的影响。若参数过大,则容易发生早熟收敛的现象,而参数过小,则种群中选出的非劣解的数量可能过少。
PSO模拟的是鸟群的捕食行为。设想场景:一群鸟在随机搜索食物。在这个区域里只有一块食物。所有鸟都不知道食物在哪里。但是他们知道当前的位置距离食物还有多远。那么找到食物的最优策略是什么?最简单有效的就是搜寻目前离食物最近的鸟的周围区域。
鸟群在整个搜寻过程中,通过相互传递各自的信息,让其他鸟知道自己当前的位置,通过这样的协作来判断自己找到的是不是最优解,同时也将最优解的信息传递给整个鸟群,最终整个鸟群都能聚集在食物源的周围,即找到了最优解。

PSO中,每个优化问题的解都是搜索空间的一只鸟,我们称之为“粒子”。所有的粒子都有一个被优化的函数决定的适应值,每个粒子还有一个速度决定他们飞翔的方向和距离。然后粒子们就追随当前的最优粒子在解空间中搜索。
PSO初始化为一群随机粒子(随机解)。然后通过迭代找到最优解,在每一次迭代中,粒子通过跟踪两个“极值”来更新自己。第一个就是粒子本身所找到的最优解,这个解叫做个体极值。另一个极值是整个种群目前找到的最优解,这个极值是全局机制。另外也可以不用整个种群而只是用其中一部分作为粒子的邻居,那么在所有邻居中的极值就是局部极值。
PSO初始化为一群随机粒子(随机解)。然后通过迭代找到最优解。在每一次迭代中,粒子通过跟踪两个“极值(pbest和gbest)”来更新自己。在找到这两个最优值后,粒子通过下面的公式来更新自己的速度和位置。


当前针对PSO算法开展的研究工作种类繁多,经归纳整理分为如下八个大类:(1)对PSO算法进行理论分析,试图理解其工作机理;(2)改变PSO算法的结构,试图获得性能更好的算法;(3)研究各种参数配置对PSO算法的影响;(4)研究各种拓扑结构对PSO算法的影响;(5)研究离散版本的PSO算法;(6)研究PSO算法的并行算法;(7)利用PSO算法对多种情况下的优化问题进行求解;(8)将PSO算法应用到各个不同的工程领域。以下从这八大类别着手,对PSO算法的研究现状作一梳理。由于文献太多,无法面面俱到,仅捡有代表性的加以综述。
二、核心程序
...................................................................
plotObjFcn = 1; % set to zero if you do not need a final plot
%% define the objective funcion here (vectorized form)
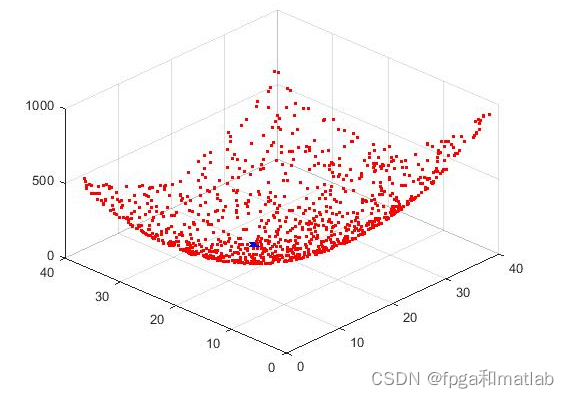
objfcn = @(x)(x(:,1) - 20).^2 + (x(:,2) - 25).^2;
tic;
%% The main loop of PSO
for iter = 1:maxIter
swarm(:, 1, 1) = swarm(:, 1, 1) + swarm(:, 2, 1)/1.3; %update x position with the velocity
swarm(:, 1, 2) = swarm(:, 1, 2) + swarm(:, 2, 2)/1.3; %update y position with the velocity
x = swarm(:, 1, 1); % get the updated position
y = swarm(:, 1, 2); % updated position
fval = objfcn([x y]); % evaluate the function using the position of the particle
% compare the function values to find the best ones
for ii = 1:swarm_size
if fval(ii,1) < swarm(ii,4,1)
swarm(ii, 3, 1) = swarm(ii, 1, 1); % update best x position,
swarm(ii, 3, 2) = swarm(ii, 1, 2); % update best y postions
swarm(ii, 4, 1) = fval(ii,1); % update the best value so far
end
end
[~, gbest] = min(swarm(:, 4, 1)); % find the best function value in total
% update the velocity of the particles
swarm(:, 2, 1) = inertia*(rand(swarm_size,1).*swarm(:, 2, 1)) + correction_factor*(rand(swarm_size,1).*(swarm(:, 3, 1) ...
- swarm(:, 1, 1))) + correction_factor*(rand(swarm_size,1).*(swarm(gbest, 3, 1) - swarm(:, 1, 1))); %x velocity component
swarm(:, 2, 2) = inertia*(rand(swarm_size,1).*swarm(:, 2, 2)) + correction_factor*(rand(swarm_size,1).*(swarm(:, 3, 2) ...
- swarm(:, 1, 2))) + correction_factor*(rand(swarm_size,1).*(swarm(gbest, 3, 2) - swarm(:, 1, 2))); %y velocity component
% plot the particles
clf;plot(swarm(:, 1, 1), swarm(:, 1, 2), 'bx'); % drawing swarm movements
axis([-2 40 -2 40]);
pause(.1); % un-comment this line to decrease the animation speed
disp(['iteration: ' num2str(iter)]);
end
................................................................
up124三、仿真结论