@[toc]
UE4/5的control rig绑定中作者也遇到过很多问题。
今天我就简单写一下该如何进行对人物骨骼的control rig。
准备
骨骼
骨骼问题很重要,ue的骨骼在关节处是会多处那么一两个骨骼的,这个骨骼是针对旋转的,如果是初学者,那么很容易会因为这些骨骼绑定的时候产生一些莫名其妙的效果。
小白人啥的就不说了,众所周知,假设我们自己制作了一个模型和骨骼:

这么一个火柴人的骨骼,可以看到是专门用虚幻手法的骨骼绑定,只不过是没有手指罢了,其他地方的骨骼倒是一样的
创建Control Rig
创建Control Rig的方法有两个
第一种方法是:
通过骨骼网格体(粉紫色的那个),右键控制绑定即可。
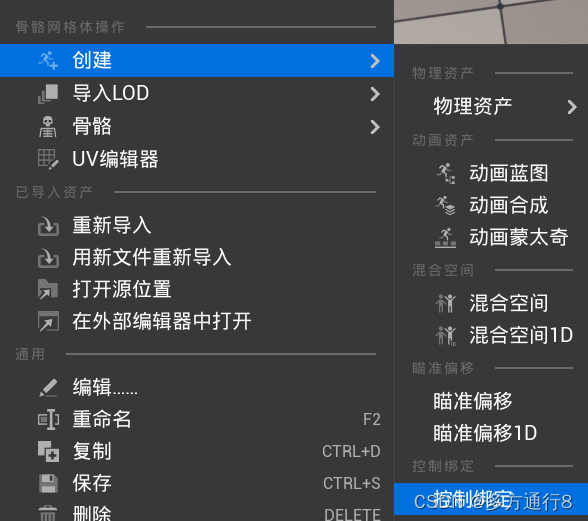
第二种方法是:
右键,动画,下方的control rig,里面就有控制绑定(如果是ue4的话,就在动画里面):

第二种方法创建的,进入之后还要对骨骼进行选择:
打开之后我们可以看到是这个样子,点击我画的图标对骨骼网格体进行导入
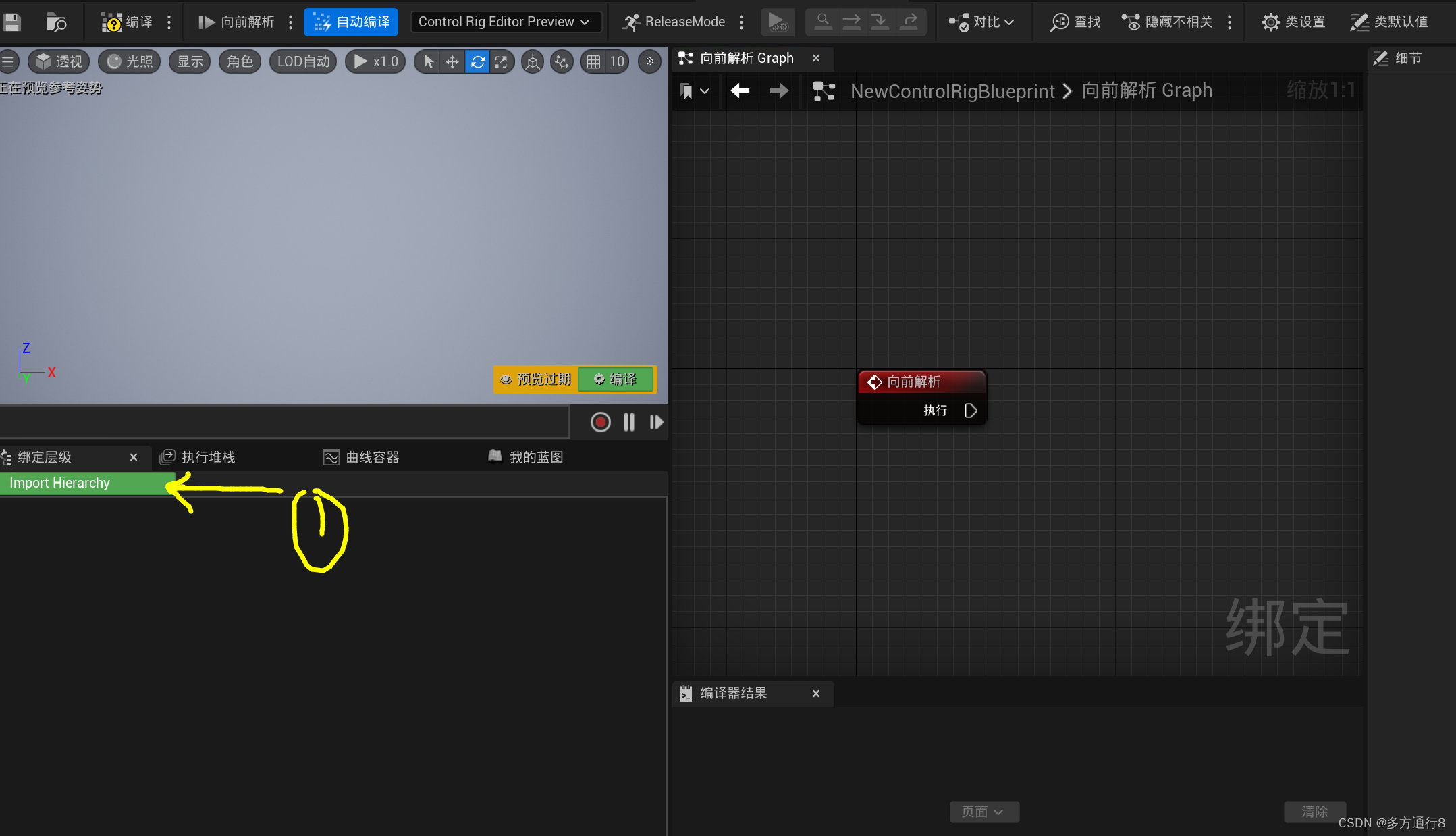
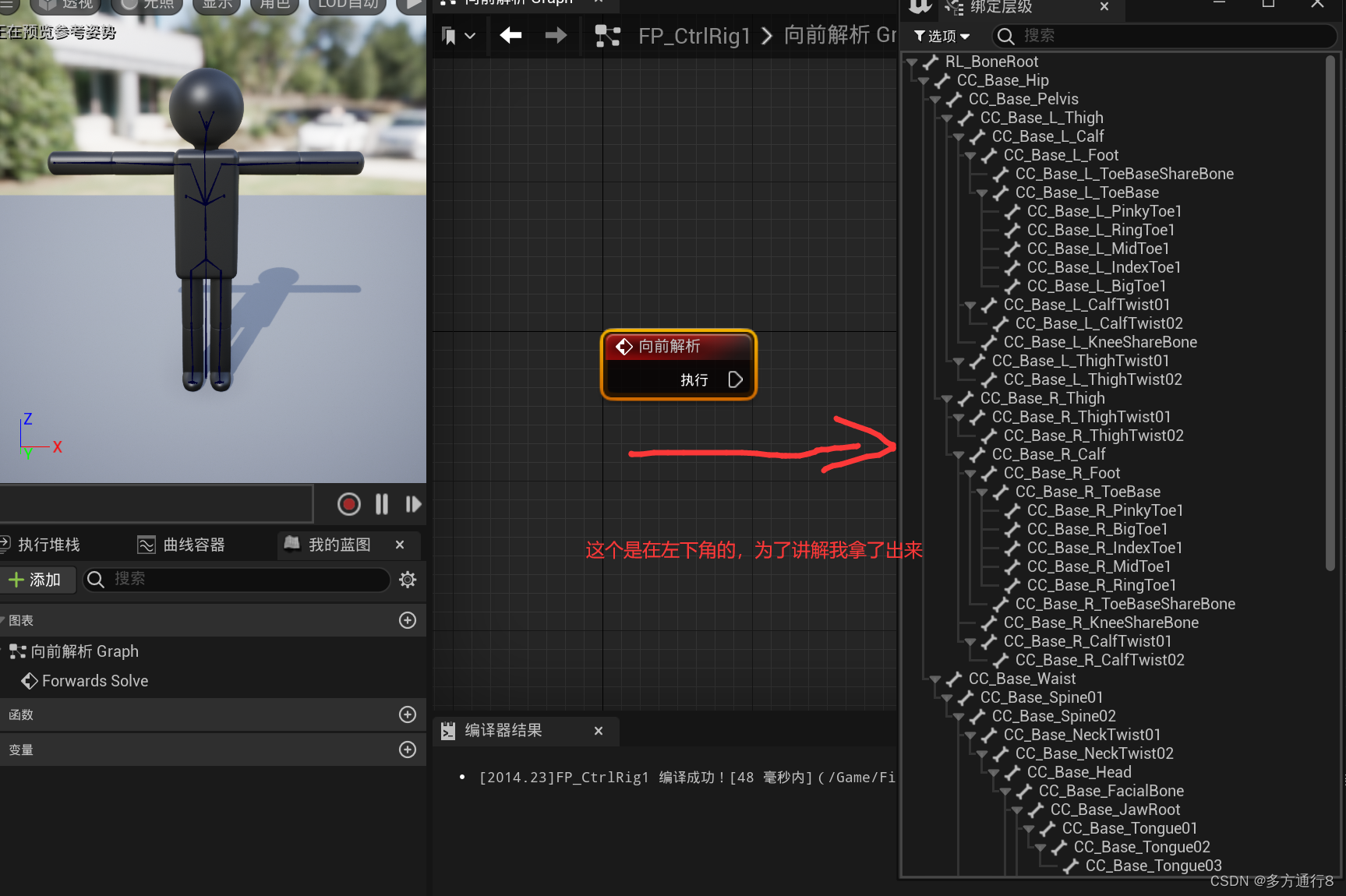
然后就是这个样子:
为了较好的讲解我把于左下角的骨骼绑定拿了出来。
向前解析
向前解析其实就是创建控制器,然后将控制器添加上去,只要将这里做完,那么就可以自己去k动画了,但如果想要对已有的动画序列进行修改,那么需要将向后解析也一起完成。
创建控制器
单个创建控制器
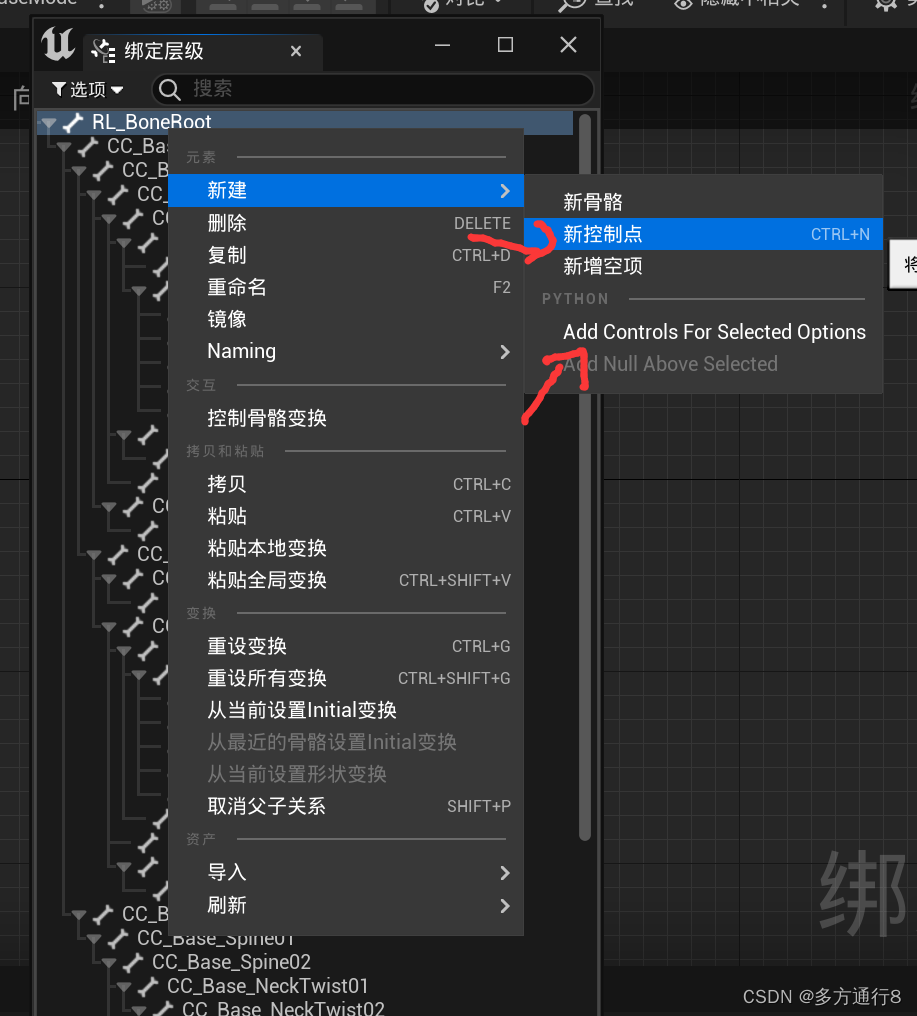
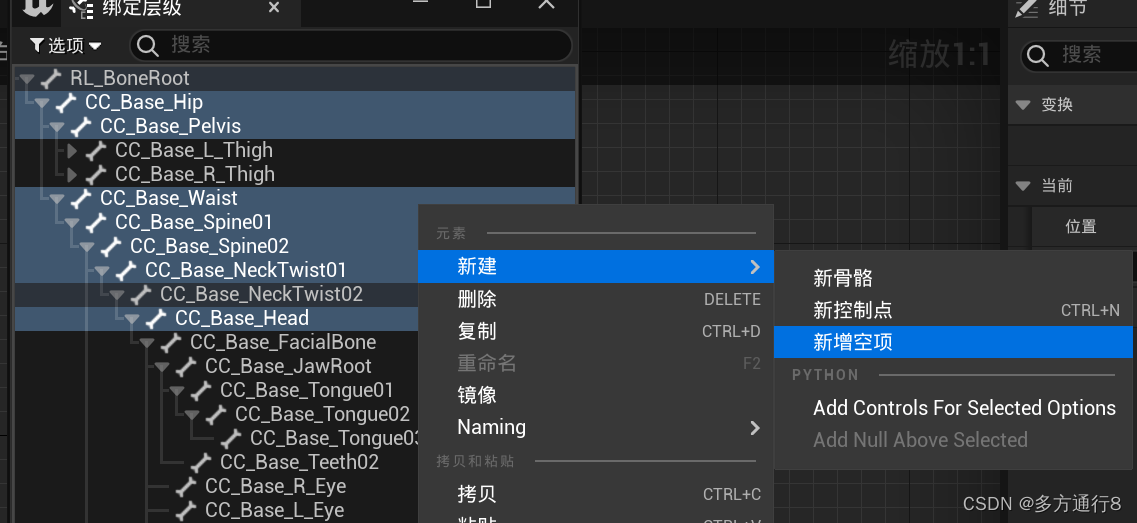
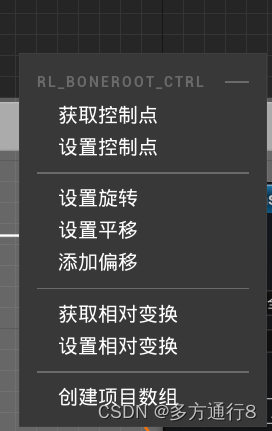
第一步右键你的根骨骼,在新建处可以看见新控制点和一串英文。
两个都是创建控制器的,只不过上面的新控制点是直接在骨骼底下创建,而下面的那一串英文则是直接将创建的控制点放在最下面***,属于另一个层级,所以我们一般是选择下面的那一串英文。
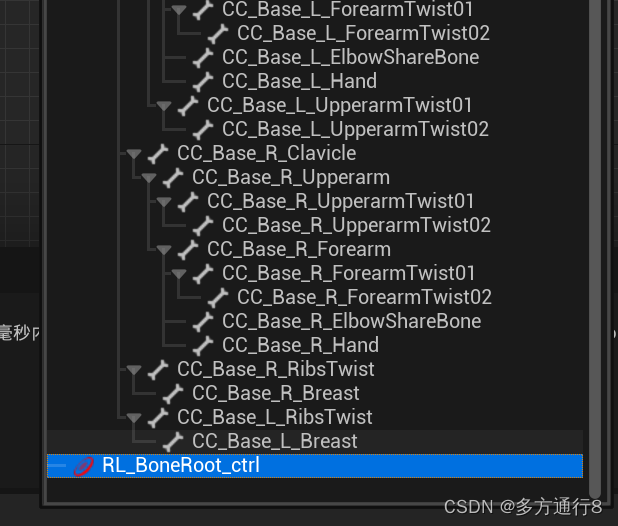
点击好英文之后是这个样子的:
你可以翻到最下面,它就在那,这就是全新的根控制器*。
多个创建控制器
然后我们可以进行多个创建:
按住ctrl或者shift进行多选然后创建。同样是按新控制点和那一串英文,直接可以创建一堆,当然,这里我们创建的话只需要选择几个即可,不需要像我一样这么多。
当然他们创建后会保留原来的层级,这些层级是可以拿出来进行调整的,所以没关系。
参数的更改:
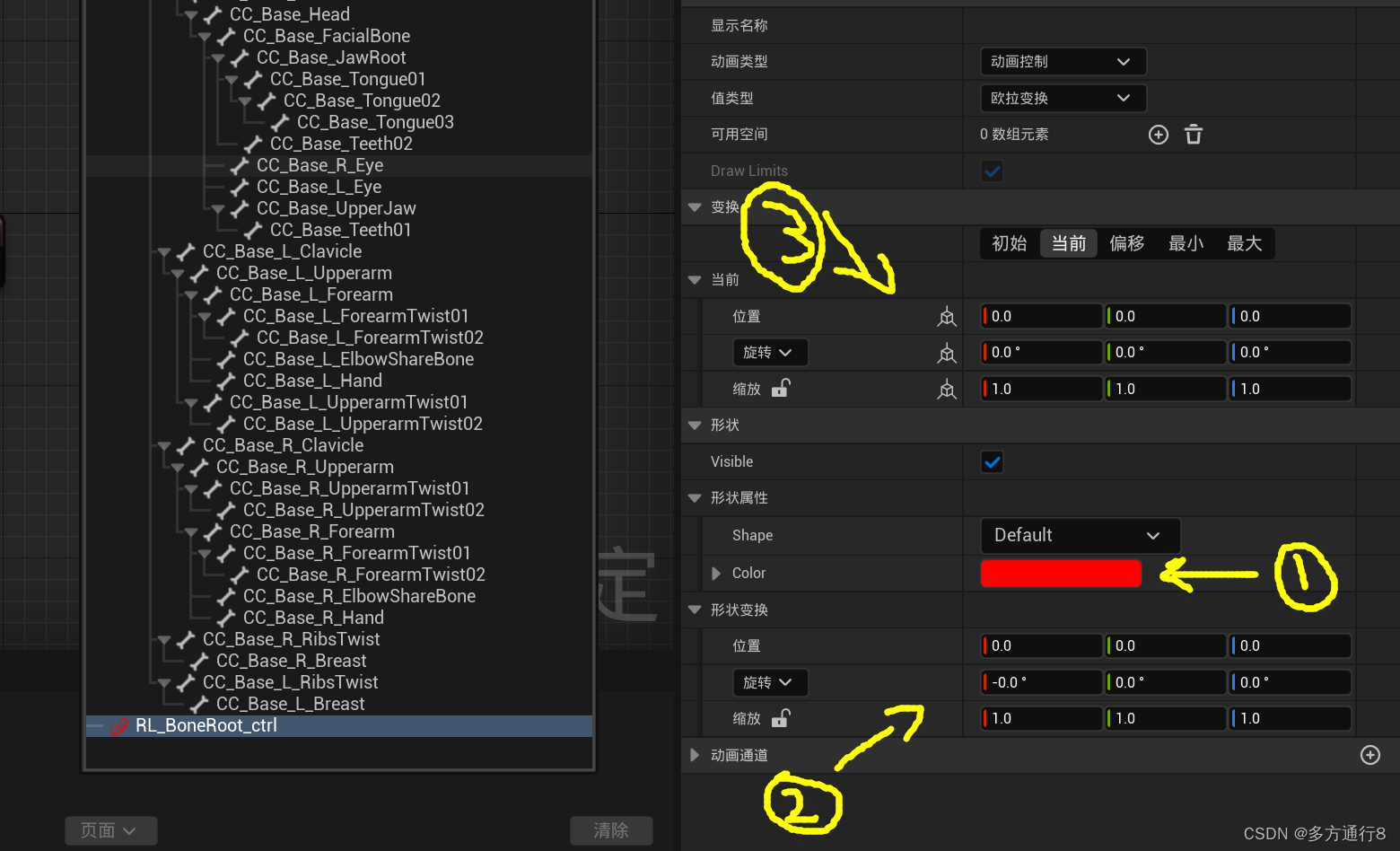
选择控制器后,右侧就可以看到我标注的地方:
标注1是改变颜色,上面的shape是换形状,大家可以看到很多k动画的视频里面,人物身上都有哪些方方块块的东西,就是这个。
标注2是变换,懂得都懂,这里的话主要是缩放和旋转用的比较多,后面会在制作中讲解。
标注3是也是变换,不同的是这里的变换是和视口有关的,之后也会进行讲解。
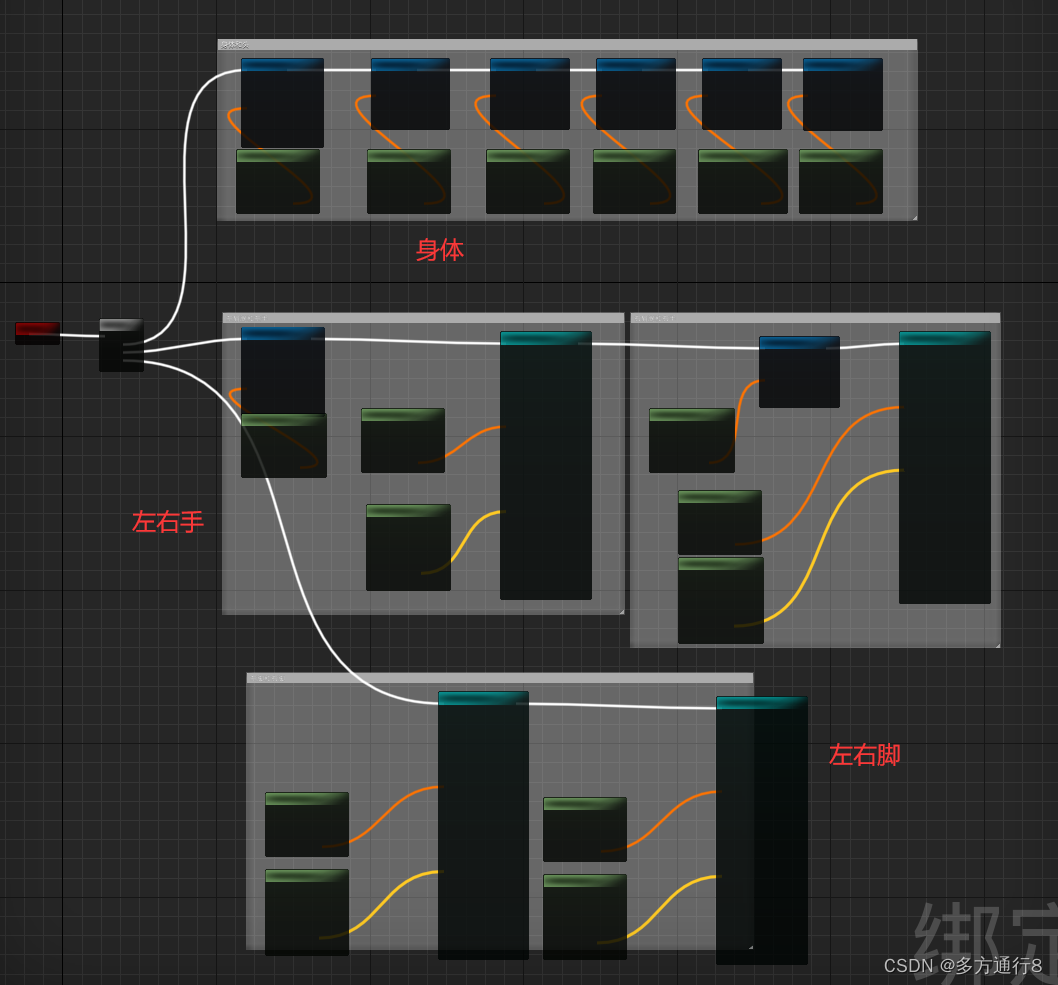
向前解析身体部分创建:
创建身体部分,不需要像上面图片那样那么多,一般是根骨骼1个,身体有3个左右,然后脖子一个和头一个。
control rig的标准是左边是蓝色的,右边是红色的,中间随便什么颜色,我一般用黄色。
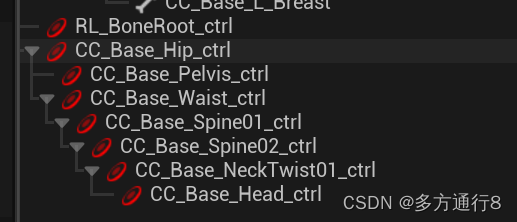
身体控制器创建:
这里就用绿色了:
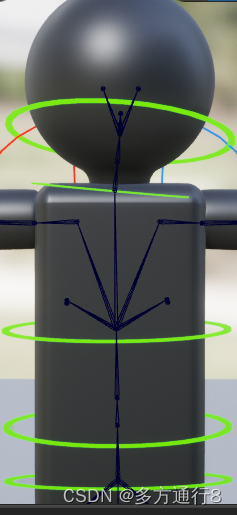
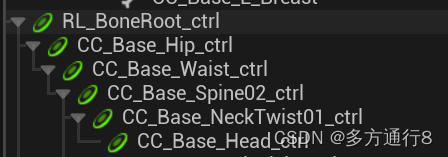
可以看到这里都是一个层级下来,
向前解析身体部分:
首先我们将控制器拖拽到蓝图的地方,会出现是获取控制器还是设置控制器。
因为是向前解析所以是**获取控制器***,这点很重要
然后选择和控制器相应的骨骼(即是那个骨骼创建的控制器,就把哪个骨骼拿出来),同样的方法,然后是设置骨骼***。
然后都是将获取的控制器的变换连接到骨骼:
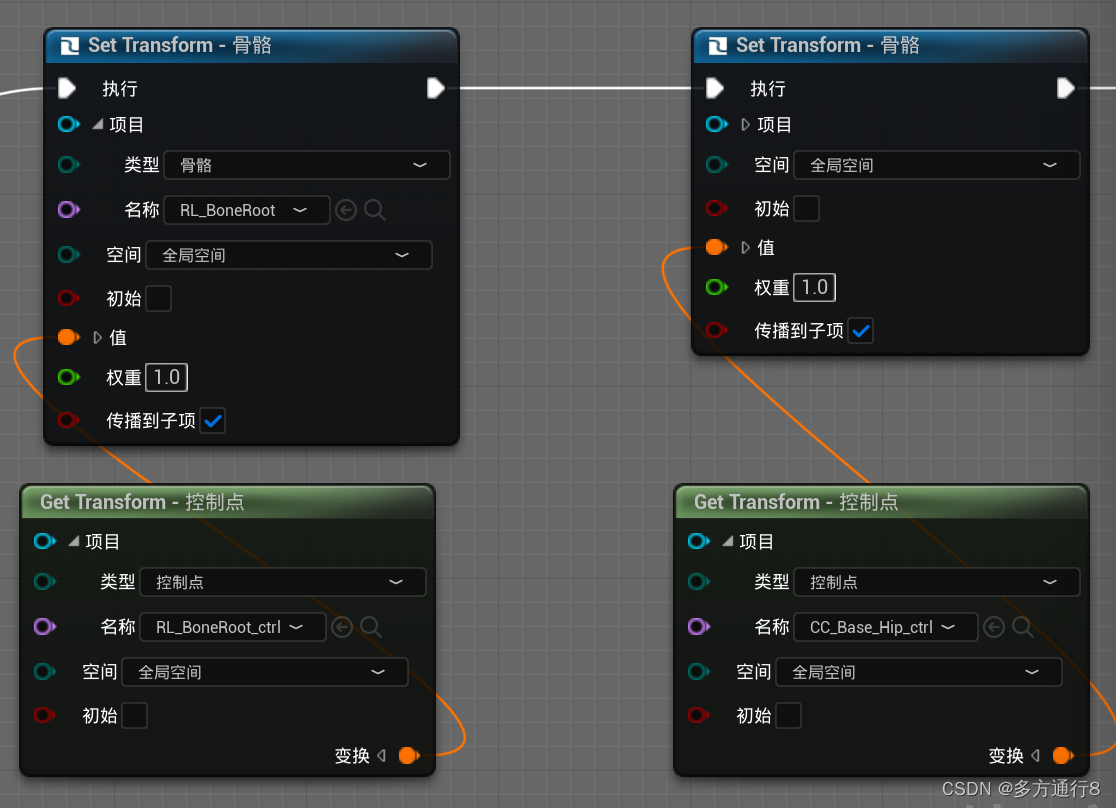
以此类推,做完身体和头(肩膀手臂和腿的不是这样做的)
这里可能出现的问题:
获取控制器之后,如果ue是英文版可能不会出现一个问题,但如果是中文版就会出现这个问题:
它会显示是骨骼,然后控制器是红色的,当然,你只需要点击类型,选择控制点即可。

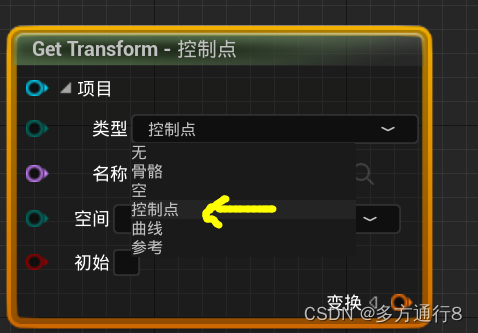
这样就解决了。
还可能会出现的问题是骨骼拖出来的不显示,只要打开项目的小三角即可:


向前解析手臂部分:
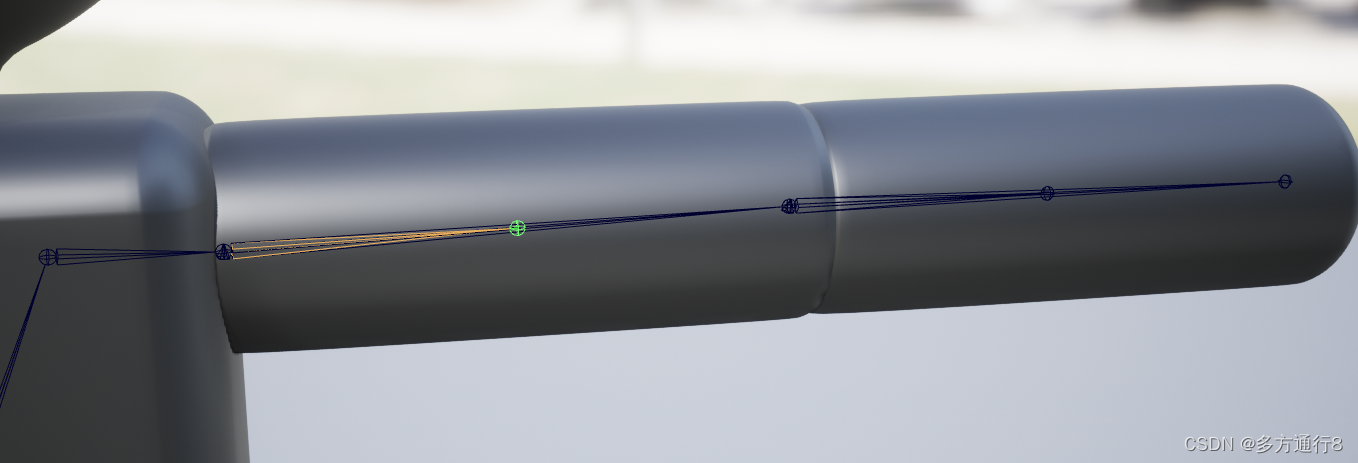
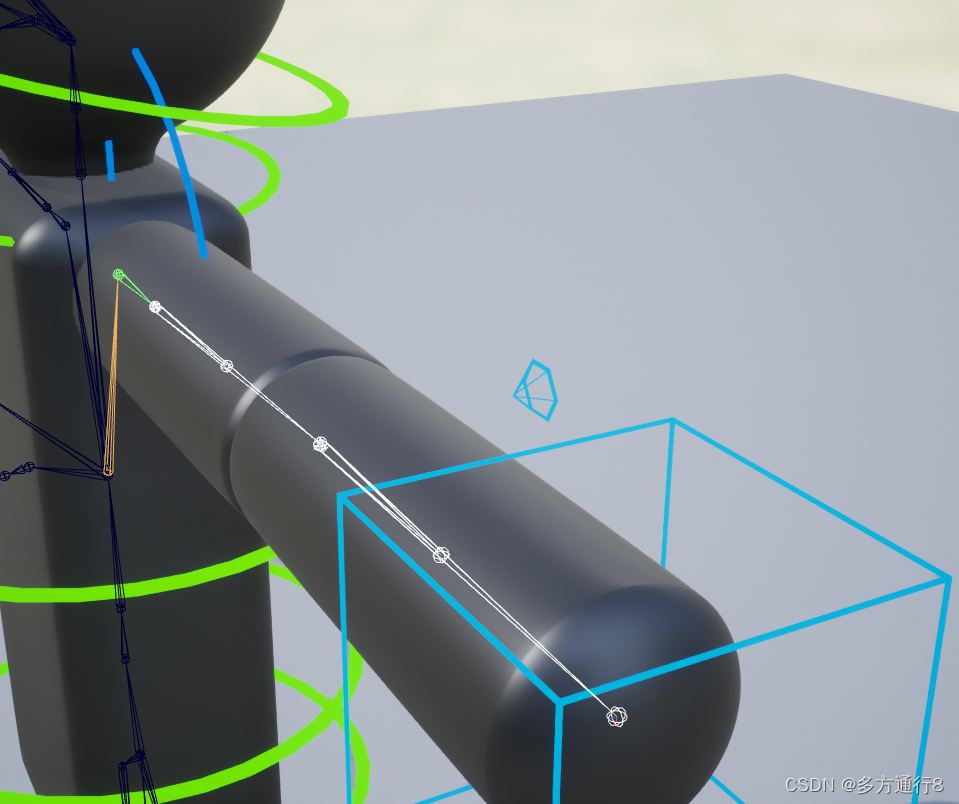
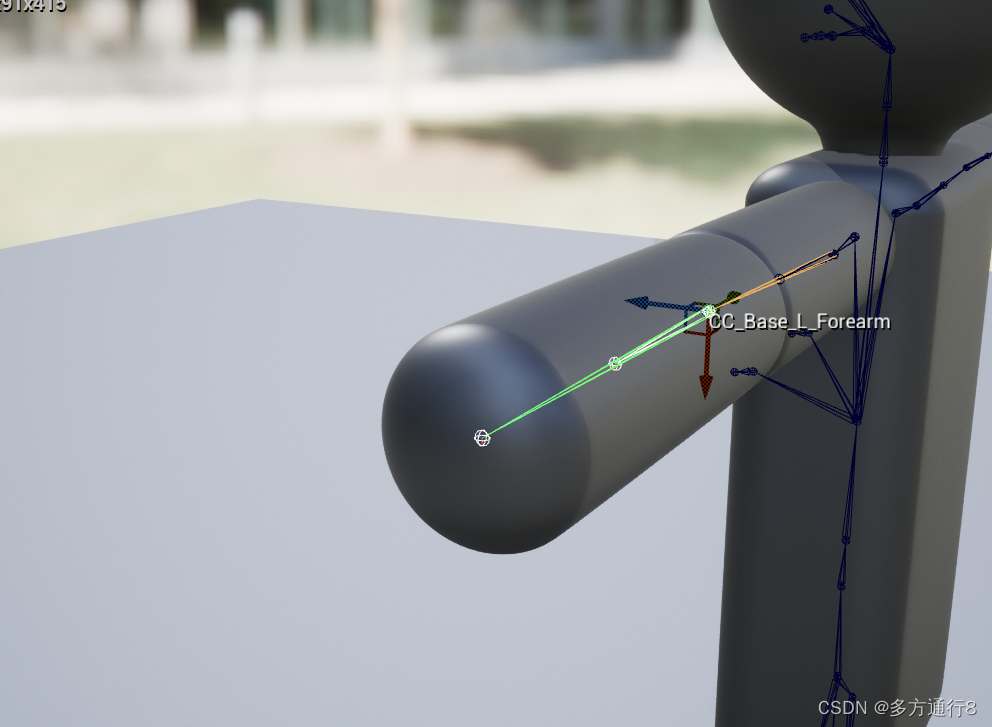
制作手臂部分前,我们可以看看ue骨骼,基本上都有这样多出来的关节骨骼(作者的火柴人没有手臂,最右边的是hand),这里我们不需要在意,只需要找到这些骨骼的父节点即可。
首先创建控制点,将左右肩膀,手肘和手创建
肩膀是这个,小白人也是一样,可以看下面的骨骼,我将那几个分叉的旋转骨骼标注了,作为他们的父级是Clavicle(不是Upperarm,以前错过,所以提醒各位):
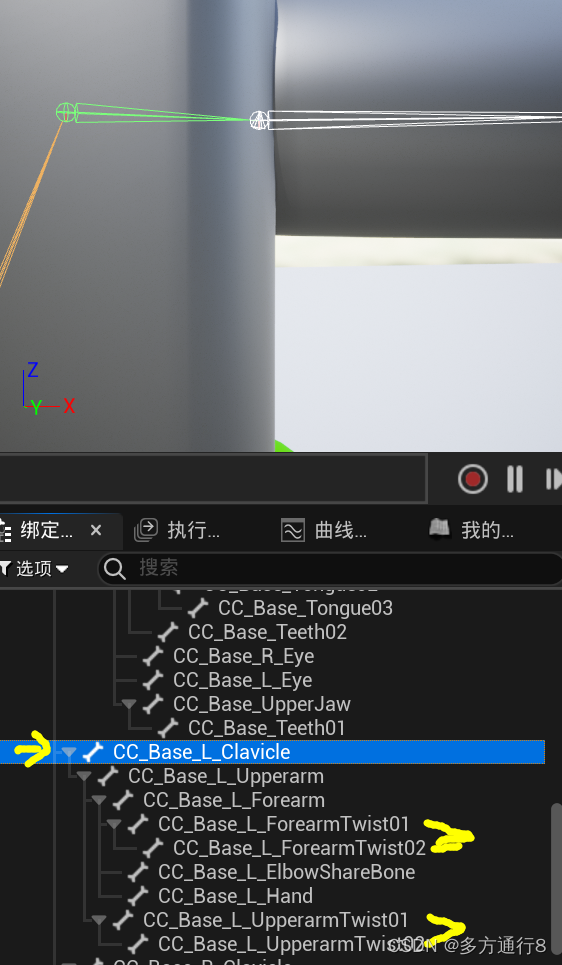
然后是正常的手肘和手即可(是一条链下来的那个骨骼***,不是旋转骨骼)
然后可以看见下面我制作的:
我把肩膀放在了最靠近肩膀的身体那块,而手肘和手是放在root*层下的。
这是为了更好的调整手的控制(当然也可以自己选择,普遍是这样)

之后我们就要设置他们的形状shape:
手肘部分的制作要将其拉到后面,然后右键:这是为了不会导致因为控制器而发生的骨骼偏移。
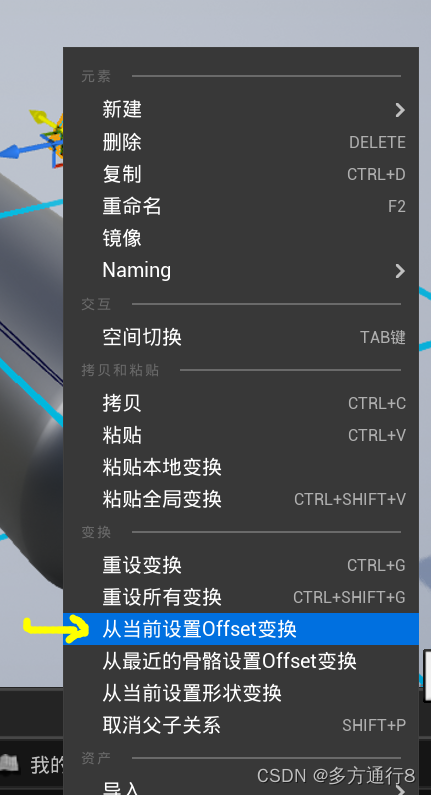
肩膀以1/4圆,手是方块,手肘则是偏移的圆(或者圆锥):
自己进行缩放到合适大小,情况如下:
左手结束就是右手:
手臂向前解析蓝图部分
然后就是蓝图部分了:
首先是肩膀,肩膀部分是和之前一样的:

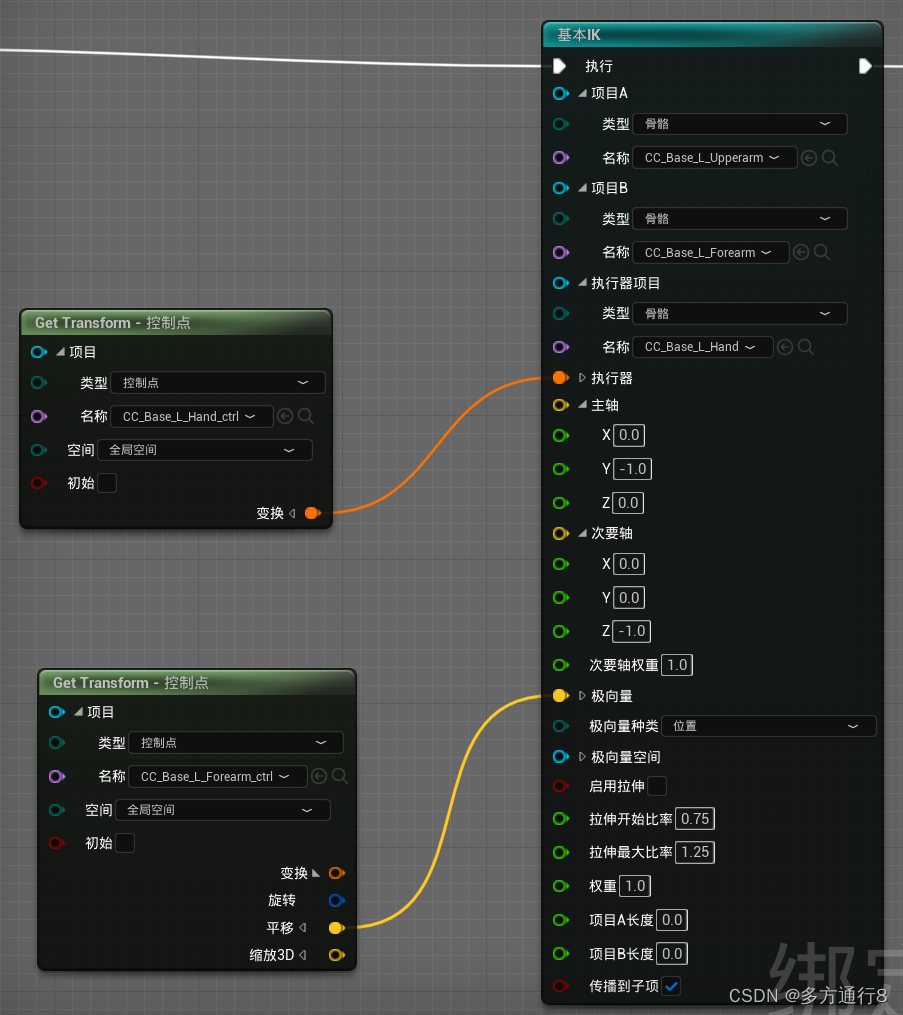
但是手这里就不一样了,我们需要一个***basic IK(基本IK)的函数:
然后获取手和手肘的控制器:
1.basic IK(基本IK),选择的骨骼A是 肩膀下面一级的骨骼Upperarm,B是 手肘骨骼Foream,C是手 Hand
2.手的变换直接连接执行器。
3.手肘则是取平移连接极向量
4.看到我打开的***主轴和次要轴,里面是需要填写1个数值的(不写模型扭曲)
看主轴和次要轴方法:
方法有两个,作者也只会一个:
第一种:我们就试,主轴写x,则次要轴就只写y或者z,需要实验的数值只有1和-1,然后是0
所以,得到的方法有:
主:x:1,y:0,z:0 ||主:x:1,y:0,z:0 ||主:x:-1,y:0,z:0 ||主:x:-1,y:0,z:0
次:x:0,y:1,z:0 ||次:x:0,y:-1,z:0||次:x:0,y:1,z:0 ||次:x:0,y:-1,z:0
就这样一次次试出这个值。
第二种作者是看一个老外这样做的:
它进入骨骼中,点击了手肘的骨骼,然后在侧后方看一眼,就知道怎么写了:
如果各位知道可以告诉一下作者。
这里可能出现的问题:
不要使用镜像,因为如果你的模型并不是完全对称的话(完全对称也可能会出现错误,不要试图偷懒),到时候在向前解析的时候会发生错误
向前解析腿部分
和上面一样的方法,两个膝盖和两个脚就可以了
选择shape
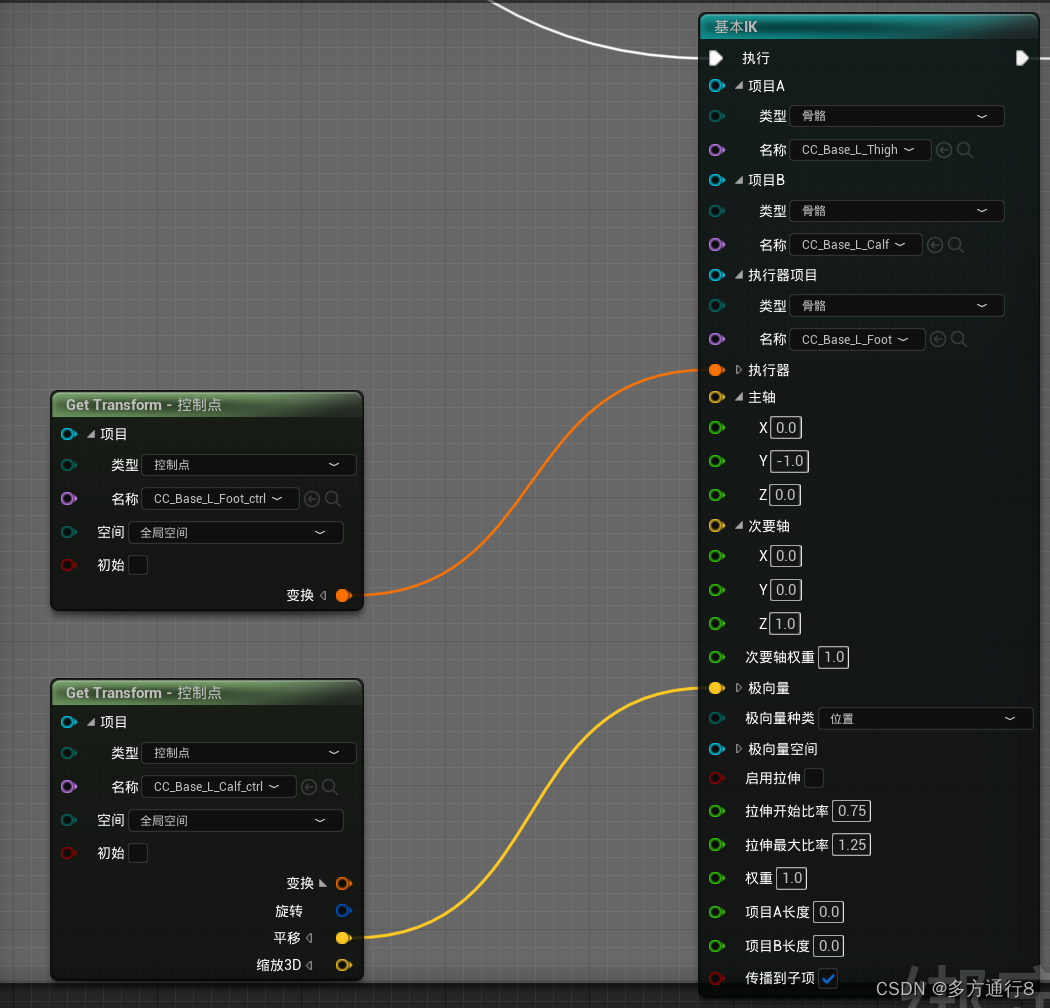
然后是蓝图部分:
和手臂一样的方法,只不过少了肩膀而已。
1.basic IK(基本IK),选择的骨骼A是 盆骨下面一级的骨骼(大腿)Thigh,B是 膝盖骨骼Calf,C是脚 Foot
2.脚的变换直接连接执行器。
3.膝盖则是取平移连接极向量
4.主轴和次要轴,里面是自己测试填写1个数值的(不写可能模型扭曲)
两只脚都是一样的,会了一个就会另一个。
将他们全部连接起来即可
可能出现的问题:
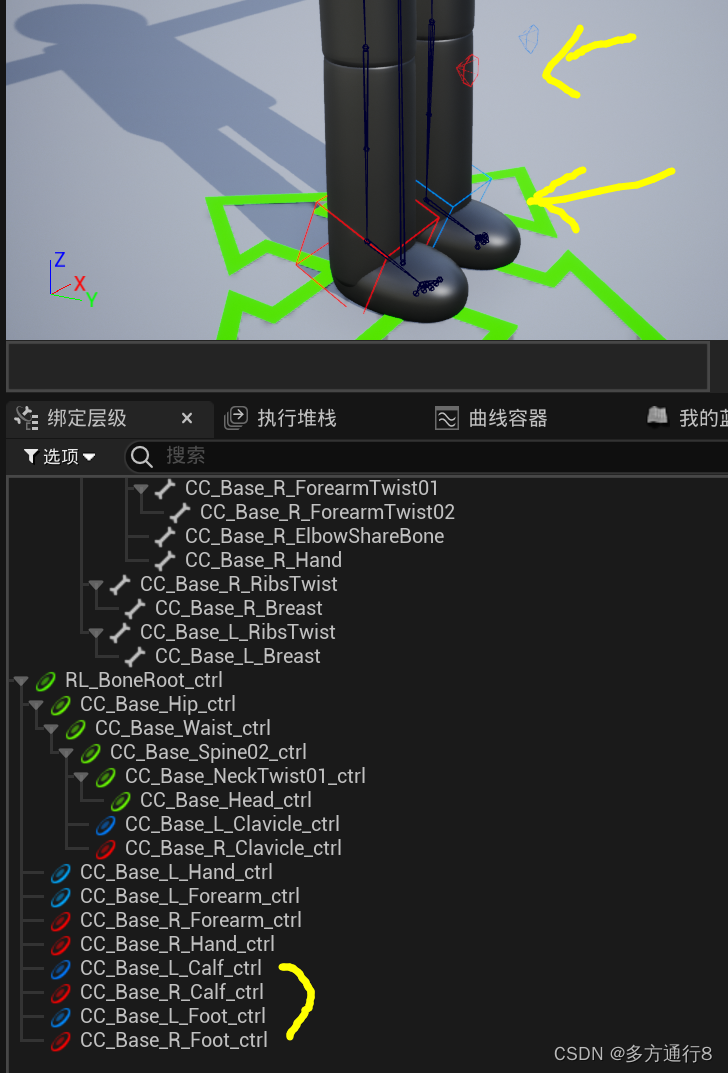
可以看上面最开始图片的脚那里,我的脚方块是弯曲的,注意这个时候如果想要将其调整正常:
只能在右侧的这里调整:

如果直接在视口里面调整,或者是上面调整,那么一开始可能不会有事情,但是在绑定的时候可能会出现小脚脚翘起来的情况。
最后的蓝图情况:
那个是分开的是序列,按住s左键就会出现。