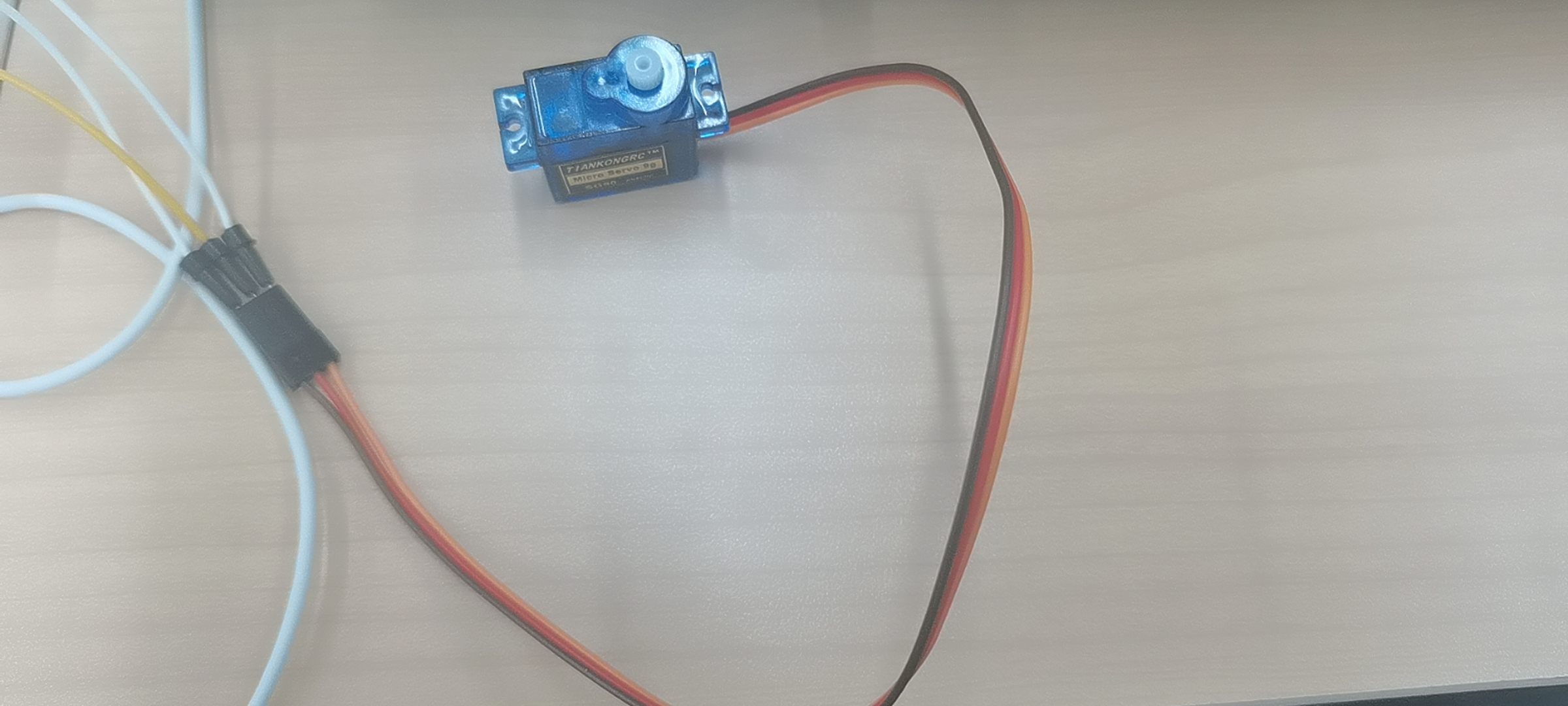
一、SG90舵机的引脚介绍
舵机上会引出三根线:分别是GND(棕色线)、VCC(红色线)和SIG(黄色线),就是地线、电源线(5V)和信号线。千万不能接错!
二、与pico引脚的对接
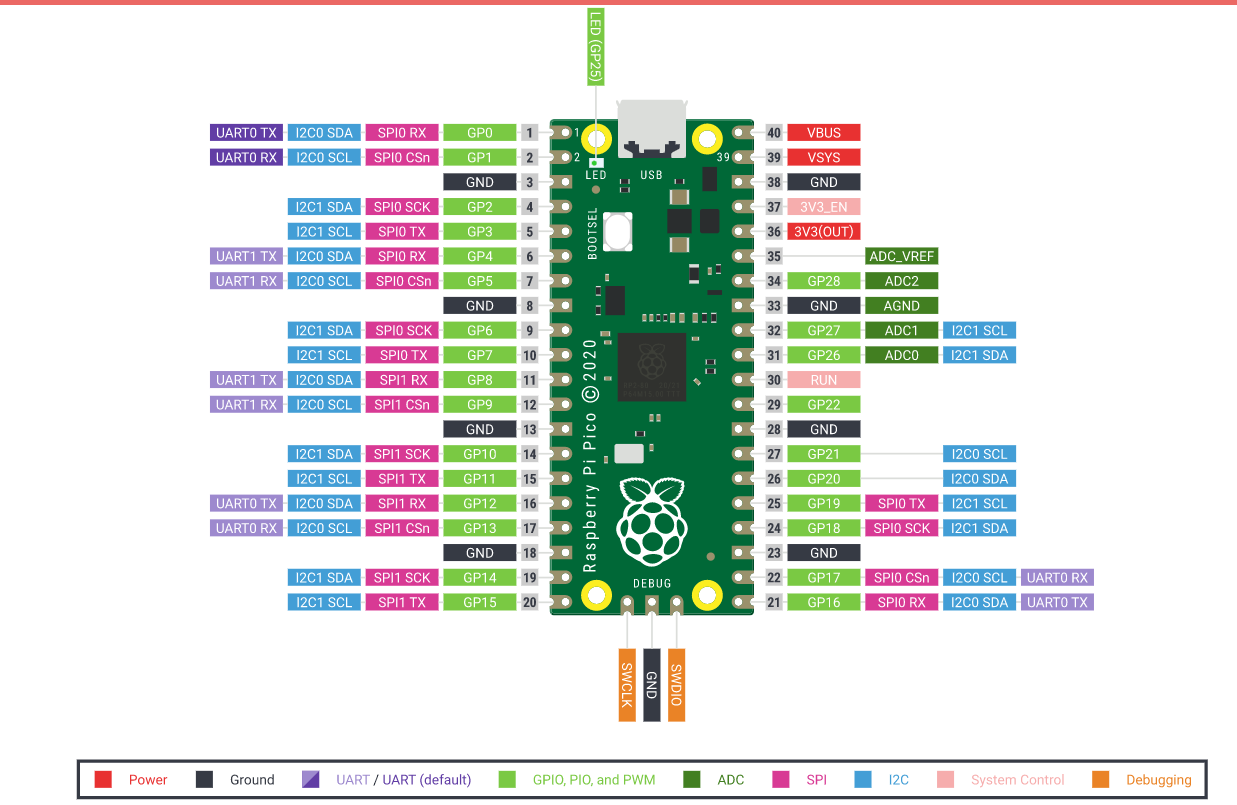
黄色(数据线) —>GPIO0
棕色(底线GND) —>VBUS
红色(电源线VCC) —>GND
三、舵机的使用原理
1638-8192(0-180)
sg90原理:在50hz频率下周期为20ms
t = 0.5ms——————-舵机会转动 0 °
t = 1.0ms——————-舵机会转动 45°
t = 1.5ms——————-舵机会转动 90°
t = 2.0ms——————-舵机会转动 135°
t = 2.5ms——————-舵机会转动180°
duty_u16计算方法,90度时候65532*1.5/20得到的值,
四、Thonny程序
from machine import PWM,Pin
import utime
s = PWM(Pin(0))
s.freq(50)
s.duty_u16(4915) # 4915是90度
utime.sleep(2)
s.duty_u16(8192) # 8192是180度
utime.sleep(2)
s.duty_u16(1638) # 1638是0度
五、效果展示
