本文介绍一些常用的优化方法、处理过拟合的一些手段、批归一化的方法和超参数的选取。
一、优化器
回忆:随机梯度下降(SGD)及动量(momentum)
训练中需要调整学习率
随机梯度下降算法对每批数据 进行优化,其中J 为损失函数:
基于动量的更新过程:
我们前面学习地更新 的方法,都是对所有的变量进行调整的,是全局且同等地调整各个参数的学习率,这并不一定是最优的学习方式(如不同层的权值的更新率不一定非要相同),
那么我们能不能让它自适应地对不同参数进行不同学习率地调整呢?
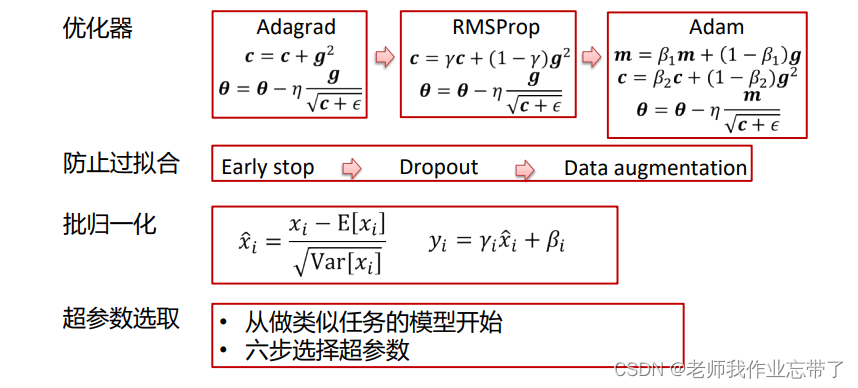
1.1 Adagrad算法
一种典型的自适应学习率算法
梯度记为
更新过程:
通常在
和
之间
- 引入了变量c,来积累历史的梯度的平方。
- 更新的时候由原来的
变为了
注:如上表示g这个向量每个元素的平方,依旧是向量;同理下方开根号操作也是,都是逐元素操作。
例子:
假设某次迭代中, 那么
显然 的有效学习率
比
的有效学习率
大,这说明虽然在前面的历史过程中,第九个参数的梯度的绝对值比较小,但在本次就多更新一些;相反的第三次参数的梯度的绝对值比较大,在更新时就少更新一些。这样就达成了实际学习率的一些平衡,避免了梯度小更新就小的问题。
引入 c 对不同参数的更新过程进行归一化(平衡)
本方法有什么缺点吗?
由于 这会使c递增,导致有效学习率
一直变小。这可能会导致早停(early stopping)。过早停止了优化。
那我们怎么解决这个问题呢?
1.2 RMSprop算法
RMSProp算法在Adagrad的基础上提出改进,以解决学习率单调下降的问题;
引入一个遗忘因子
通常为 0.9,0.99,0.999
RMSProp依然根据梯度的大小来调整学习率,但不同于Adagrad,学习率不会一直单调下降。
Adagrad vs RMSProp
- adagrad算法
平等贡献于c(t)
- RMSProp算法
对于k<<t ,
对c(t)的贡献指数级衰减,即比较看重近期的g的平方,这样c可能增加也可能减少。
缺点:如何引入动量 ?
1.3 Adam算法
由 kingma and Ba (2015)提出。 默认算法。
- 简单形式
- 完整形式(“warm up”)
其中 m 表示积攒历史梯度,c 表示积攒历史平方梯度,t 表示迭代次数。
建议值:

1.4 优化器小结

关于优化器的更多细节:CS231n Convolutional Neural Networks for Visual Recognition
二、处理过拟合
回忆:多项式回归问题

2.1 过拟合
什么是过拟合?
- 对训练集拟合得很好,但在验证集表现较差。
神经网络通常含有大量参数 (数百万甚至数十亿),容易过拟合;
- 参数正则化是一种处理策略
其它技巧
- 早停(Early stopping)
- 随机失活(Dropout)
- 数据增强(data augmentation)
2.1.1 早停
当发现训练损失逐渐下降,但验证集损失逐渐上升时,停止优化。

注意:跟Adagrad优化引起的“早停”是两回事。
2.1.2 随机失活
在训练迭代过程中,以 p (通常为0.5)的概率随即舍弃掉每个隐含层神经元(输出置零)。

这些被置零的输出将用于在反向传播中计算梯度。
优点:
- 一个隐含层神经元不能依赖于其它存在的神经元,因此可以防止神经元出现复杂的相互协同。
- 相当于在合理的时间内训练了大量不同的网络,并将其结果平均。
测试过程:
使用“平均网络”,包含所有隐含层神经元

需要调整神经元输出的权重,用来弥补训练中只有一部分被激活的现象。
- p=0.5 时,将权重减半
- p=0.1 时,在权重上乘 1-p ,即0.9。
这样得到的结果与在大量网络上做平均得到的结果类似。
MNIST上的结果:
- 标准多层感知机
- 不用dropout的最好结果是160个错误样本
- Dropout可以显著降低 错误率

本例中还用了其他技巧,比如 每个神经元的输入权重有个L2 正则化约束。
补充:
- 在一些实现里,测试中,1-p 乘在激活函数的输出即 f(Wx+b) 上,而不是乘在权重W上。
- 在一些实现里,训练中激活函数的输出改成
而测试中就不用了
- 实践中,p在底层设得很小,如0.2,但在高层设得更大,如0.5。
- 在某些平台,随机失活率被定义成每个神经元被保留的概率。
2.1.3 数据增强
表示原本的训练集
- 在输入数据中加入一些变换:
保持标签
不变
- 使用增强后的训练集
来训练模型
不同数据类型(文本,图像,音频)有不同的变换。
常用的图像变换:
- 随机
- 翻转 flips
- 平移 translations
- 缩放 crops and scales
- 拉伸 stretching
- 剪切 shearing
- 擦除 Cutout or erasing
- 混合 mixup
- 色彩变换 color jittering
- ……
- 上述变换的组合
随机翻转

随即缩放和裁剪

测试中可以
- 将测试图像缩放到模型要求的输入大小
- 剪裁一个区域 (通常是中心区域) 并输入到模型
- 剪裁多个并输入到模型, 对输出作平均
随机擦除 
2.2 处理过拟合方法小结

三、批归一化
3.1 Internal covariate shift (内部协变量偏移)
当使用SGD时, 不同迭代次数时输入到神经网络的数据不同,可能导致某些层输出的分布在不同迭代次数时不同。
某个或一群神经元针对 一批数据的输出分布:

由于神经网络比较深,一些层的分布可能就不那么相似了。
我们把:训练中,深度神经网络中间节点分布的变化叫做:内部协变量偏移(ICS)。
3.1.1 通过归一化来减少ICS
对每个标量形式的特征单独进行归一化,使其均值为0,方差为1

对于d维激活 , 做如下归一化:
保持该层的表达能力
若 且
,恢复到原来的激活值。
3.2 批归一化(Batch Normalization, BN)
构建一个新的层
向前计算(下式都是逐元素操作)
3.2.1 推理过程

如果想追踪训练准确率,可以使用滑动平均。
3.2.2 在网络中的位置
通常应用在非线性层之前(根据实践经验)
前一层通常是线性转换层(全连接层或卷积层)
偏置项可以忽略,因为BN的便宜项有相同的效果,因此
3.2.3 卷积神经网络中的批归一化
- BN通常应用在卷积层之后
- 要求同一特征图里的不同元素以同样的方式进行归一化
- 对一个minibatch:
- 假设批大小为M,特征图大小为P*Q,那么均值和方差要基于MPQ个元素计算得到
- 对每个特征图(而不是每个激活)学习一堆参数
和
- 推理过程进行类似修改
3.2.4 优点
- BN允许使用更大的学习率
- BN对整个模型进行了正则化
- 对于某个训练样本,模型不会给出确定性的输出
- 可能不再需要Dropout

3.3 批归一化小结

其它归一化技巧:

四、超参数(Hyperparameters)选取
超参数: 控制算法行为,且不会被算法本身所更新。
- 通常决定了模型的能力(capacity)
对于一个深度学习模型,超参数包括:
- 层数, 每层的神经元数目
- 正则化系数
- 学习率 – 参数衰减率(Weight decay rate)
- 动量项(Momentum rate)
- ……
对于给定的数据集和任务, 需要选择合适的超参数。
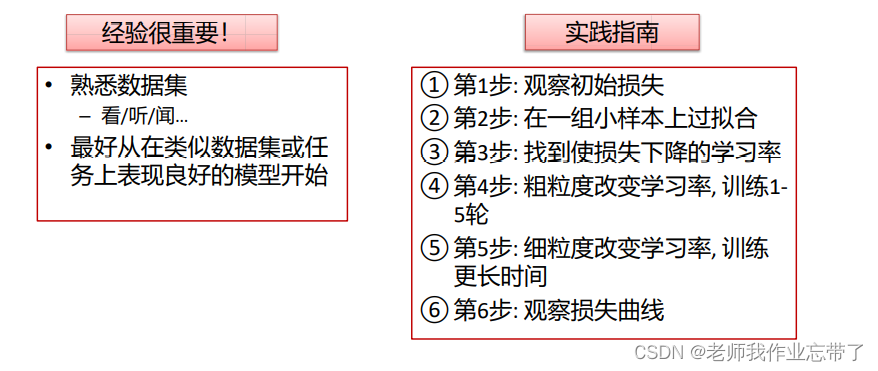
4.1 如何选择深度学习模型的架构?
- 熟悉数据集
- 看/听/闻…
- 与之前见过的数据/任务比较
- 样本数目
- 图像大小, 视频长度, 输入复杂度…
- 最好从在类似数据集或任务上表现良好的模型开始
4.2 如何选择其它超参数?
一个实践指南:
- 第1步: 观察初始损失。
- 第2步: 在一组小样本上过拟合。
- 第3步: 找到使损失下降的学习率。
- 第4步: 粗粒度改变学习率,训练1-5轮。
- 第5步: 细粒度改变学习率,训练更长时间。
- 第6步: 观察损失曲线。
第1步:观察初始损失
- 确保损失的计算是正确的
- 将权重衰减设为零
第2步:在一组小样本上过拟合
- 在一组少量样本的训练集上训练,尝试达到100%训练准确率。
- 可以保证从数据集预处理到输出的整个流程是正确的。
- 可以找出一些调整学习率的提示。
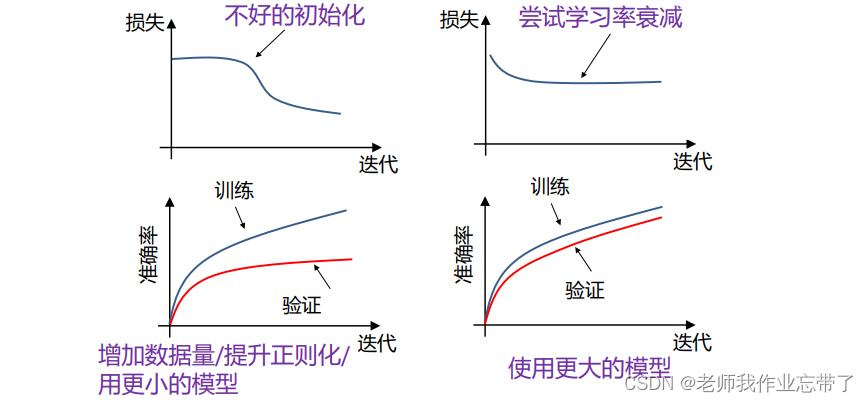
- 如果训练损失没有下降。
- 不好的初始化, 学习率太小, 模型太小。
- 如果训练损失变成Inf或NaN。
- 不好的初始化, 学习率太大。
第3步: 找到使损失下降的学习率
- 在全部数据上训练模型,并找到使损失值能够快速下降的学习率。
- 当损失值下降较慢时,将学习率缩小10倍。
- 使用较小的参数衰减。
第4步: 粗粒度改变学习率, 训练1-5轮
- 在上一步的基础上,尝试一些比较接近的学习率和衰减率。
- 常用的参数衰减率: 1e-4, 1e-5, 0。
第5步: 细粒度改变学习率, 训练更长时间
使用上一步找到的最好的学习率,并训练更长时间 (10-20 轮),期间不改变学习率。
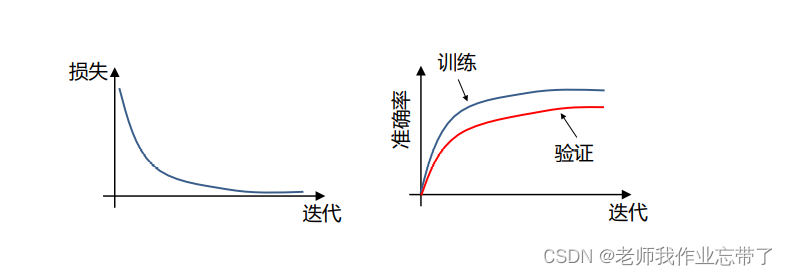
第6步: 观察损失曲线
训练损失通常用滑动平均绘制 ,否则会有很多点聚集在一起。
4.3 超参数选取小结
五、总结