| 0、准备工作 |
|---|
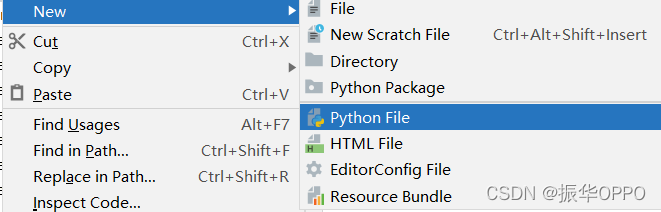
右击新建的项目,选择Python File,新建一个Python文件,然后在开头import cv2导入cv2库,import numpy并且重命名为np。
import cv2
import numpy as np
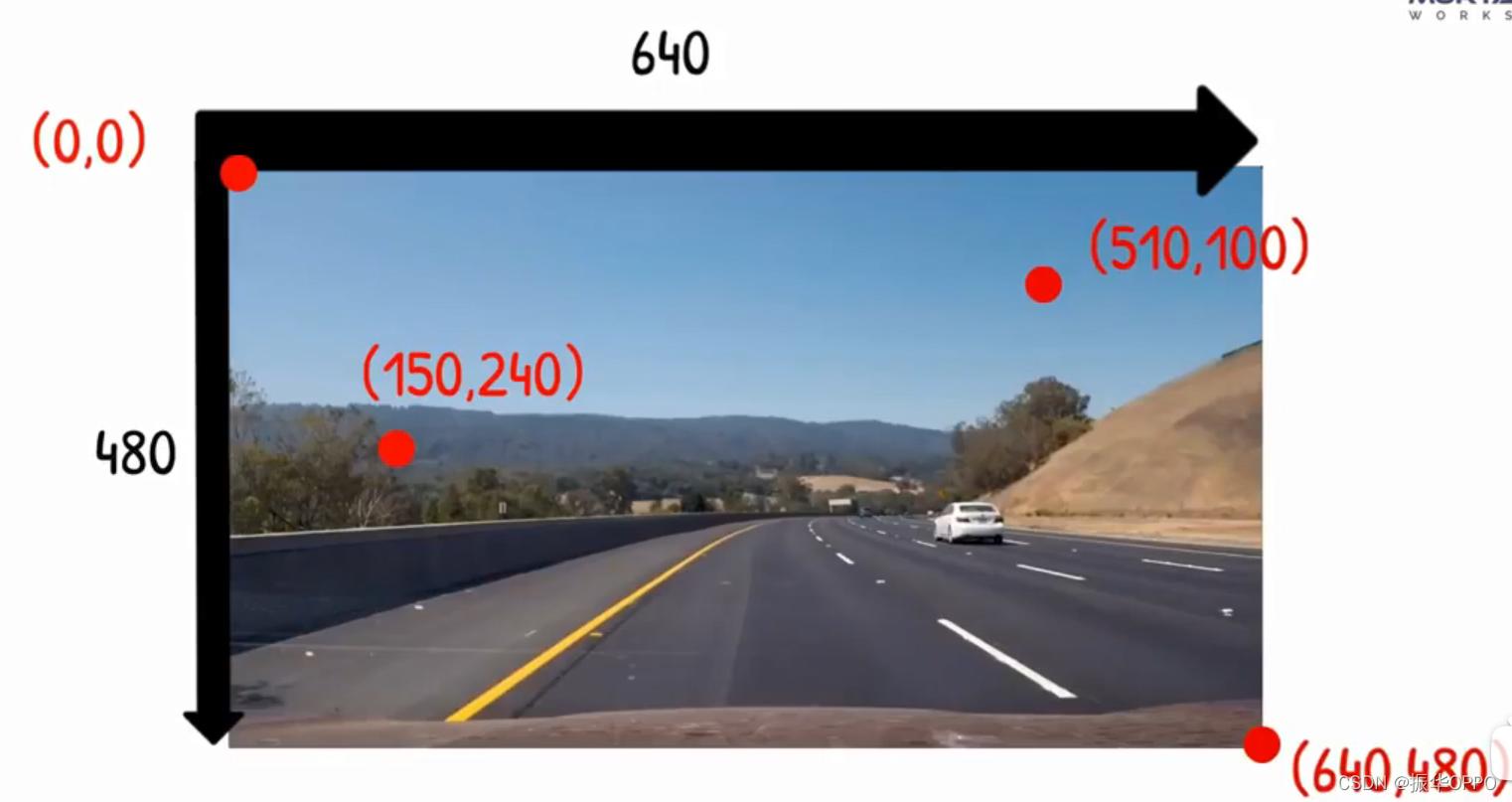
我们还要知道在OpenCV中,坐标轴的方向是x轴向右,y轴向下,坐标原点在左上角,比如下面这张长为640像素,宽为480像素的图片。OK,下面开始本节的学习吧。
| 1、实现代码 |
|---|
- stackImages()是我们上一节就使用的自己写的库函数,下面几行createTrackbar()是在定义窗口和滑动条。
createTrackbar("Hue Min","TrackBars",0,179,empty)中0是滑动条的默认值,179就是它的值域,empty是为空就pass不管它。 - Hue是色相,Sat是饱和度,Val是像素值。图像会显示它这三个属性最小值和最大值之间的像素点。
- while循环就是在滑动条进行拖动时,图像也会改变显示,同时数值也会更新输出。
def empty(a):
pass
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
path="Resources/lambo.png"
cv2.namedWindow("TrackBars")
cv2.resizeWindow("TrackBars",640,240)
cv2.createTrackbar("Hue Min","TrackBars",0,179,empty)
cv2.createTrackbar("Hue Max","TrackBars",19,179,empty)
cv2.createTrackbar("Sat Min","TrackBars",110,255,empty)
cv2.createTrackbar("Sat Max","TrackBars",240,255,empty)
cv2.createTrackbar("Val Min","TrackBars",153,255,empty)
cv2.createTrackbar("Val Max","TrackBars",255,255,empty)
while True:
img = cv2.imread(path)
imgHSV = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
h_min = cv2.getTrackbarPos("Hue Min","TrackBars")
h_max = cv2.getTrackbarPos("Hue Max", "TrackBars")
s_min = cv2.getTrackbarPos("Sat Min", "TrackBars")
s_max = cv2.getTrackbarPos("Sat Max", "TrackBars")
v_min = cv2.getTrackbarPos("Val Min", "TrackBars")
v_max = cv2.getTrackbarPos("Val Max", "TrackBars")
print(h_min,h_max,s_min,s_max,v_min,v_max)
lower = np.array([h_min,s_min,v_min])
upper = np.array([h_max,s_max,v_max])
mask = cv2.inRange(img,lower,upper)
imgResult = cv2.bitwise_and(img,img,mask=mask)
imgStack = stackImages(0.6,([img,imgHSV],[mask,imgResult]))
cv2.imshow("Stacked Images", imgStack)
cv2.waitKey(1)
| 2、运行效果 |
|---|
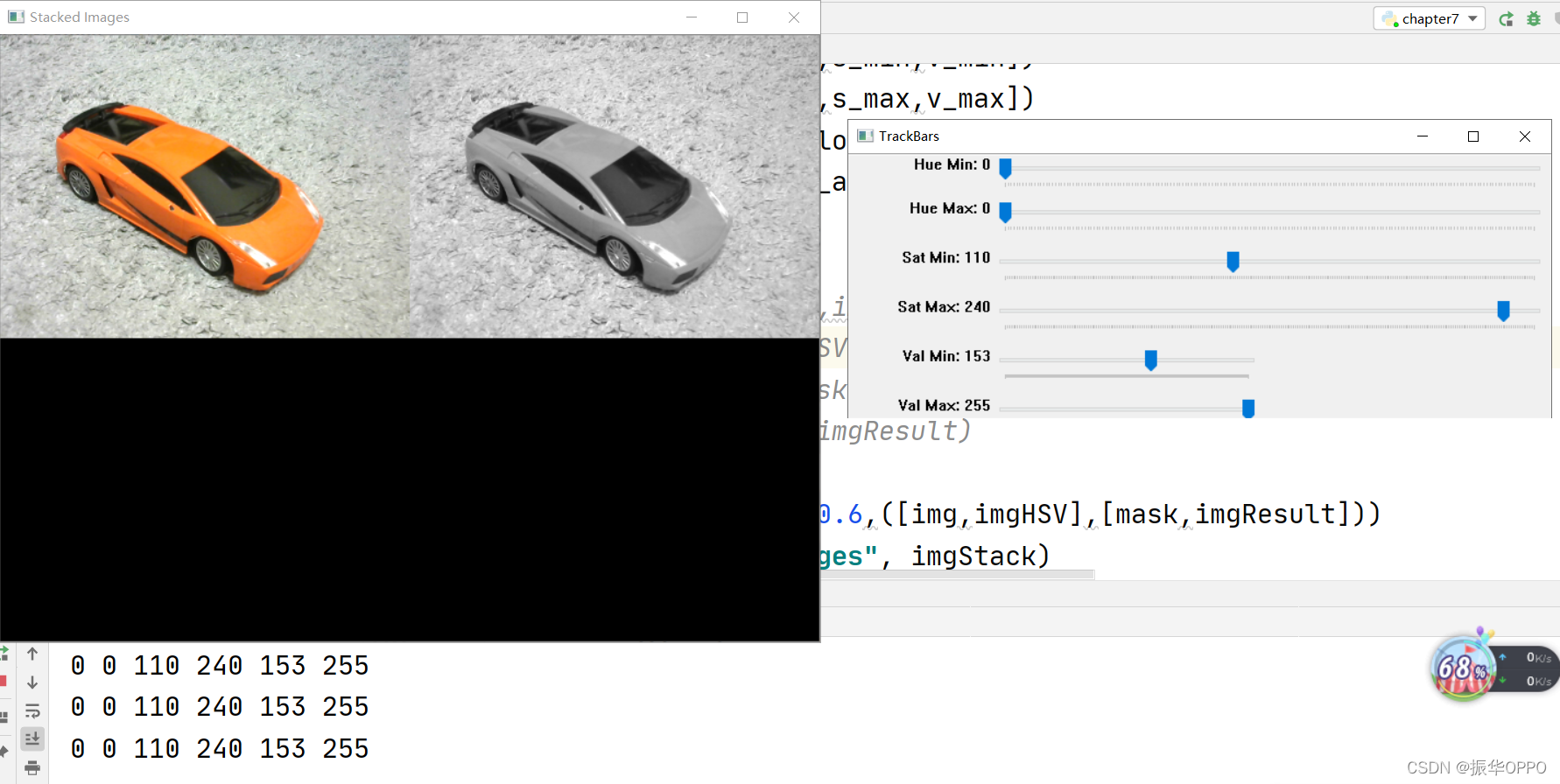
运行看下效果,刚开始都是默认值,我们将色相最小值和最大值都改为0,那肯定黑漆漆的一片。
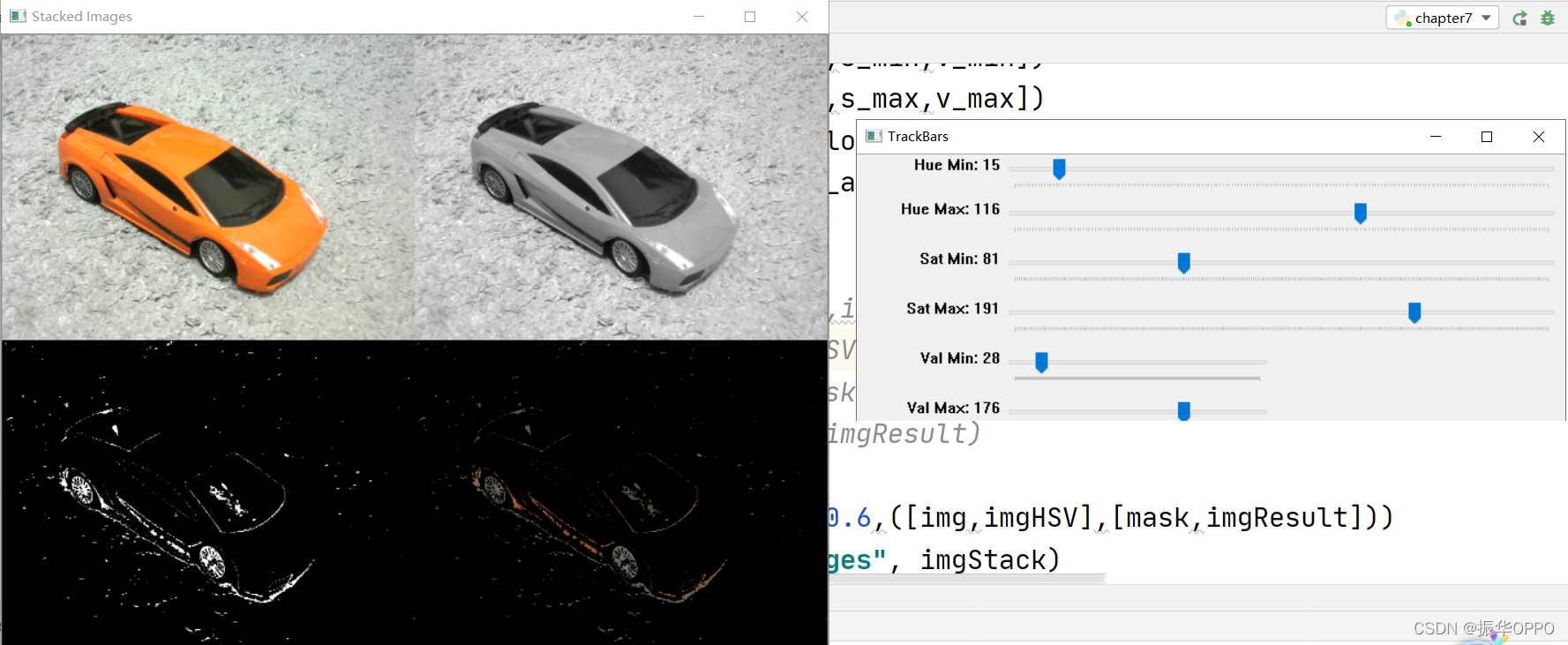
我们将色相的Max拖到116,发现车辆的颜色显示出来了。
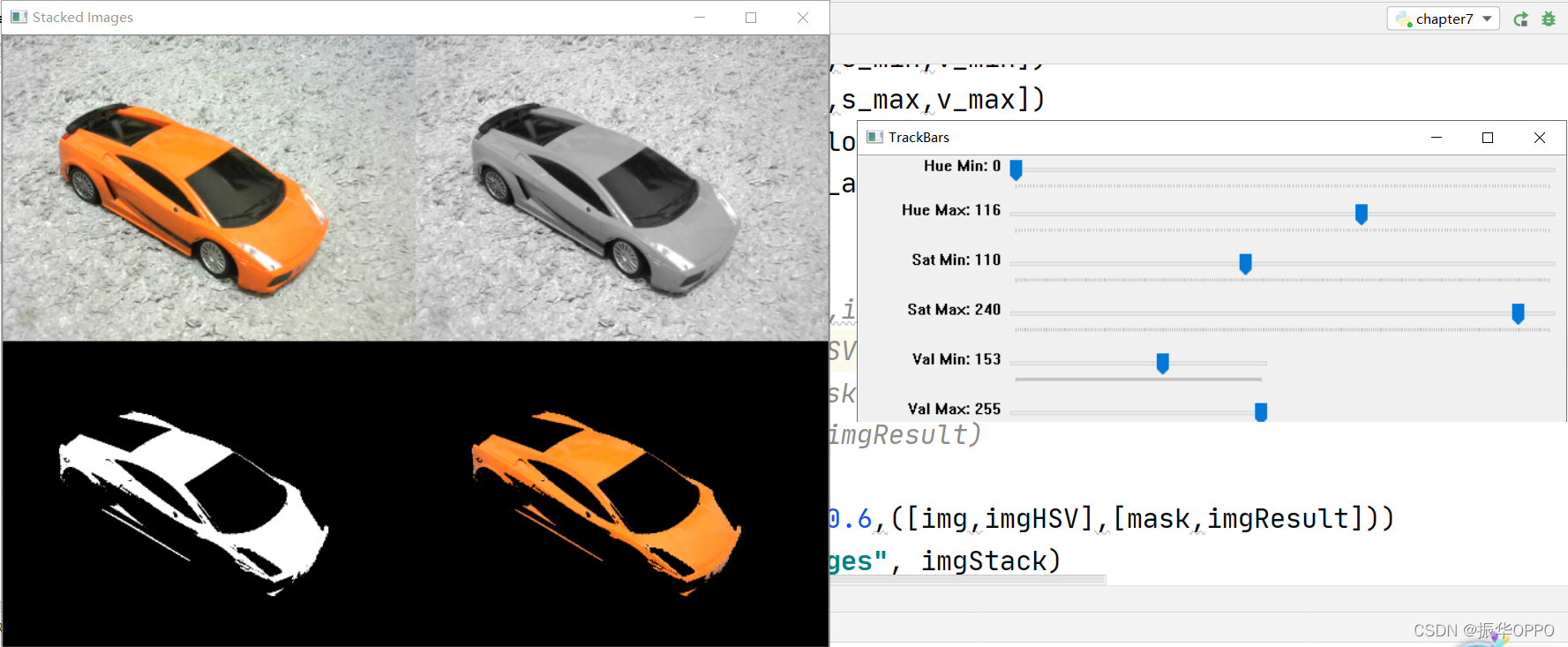
我们再来改下饱和度的Min,调到了110,图像有很多颜色点都消失了。
我们将饱和度的Max调到最大,这时候图像又全部显示出来了。
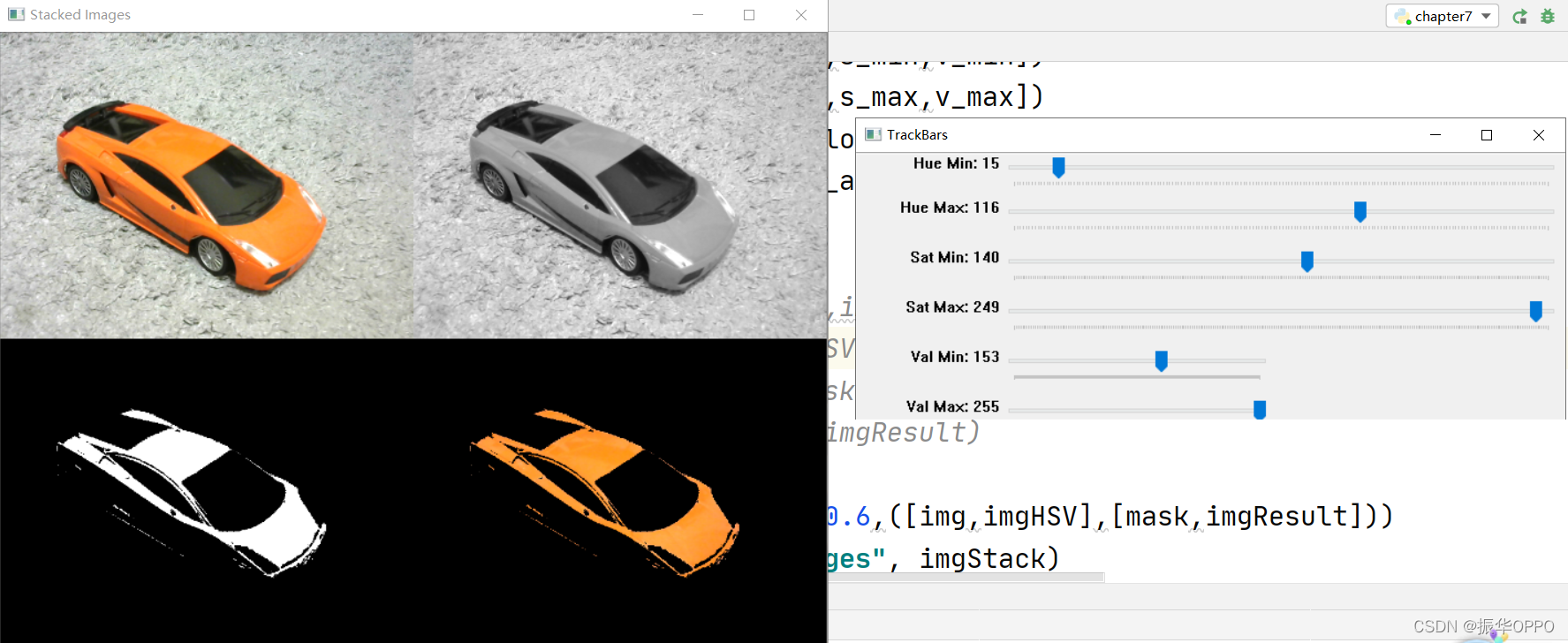
最后调整像素值,小车颜色显示的很全面,说明橙色和白色都在这个区间中。

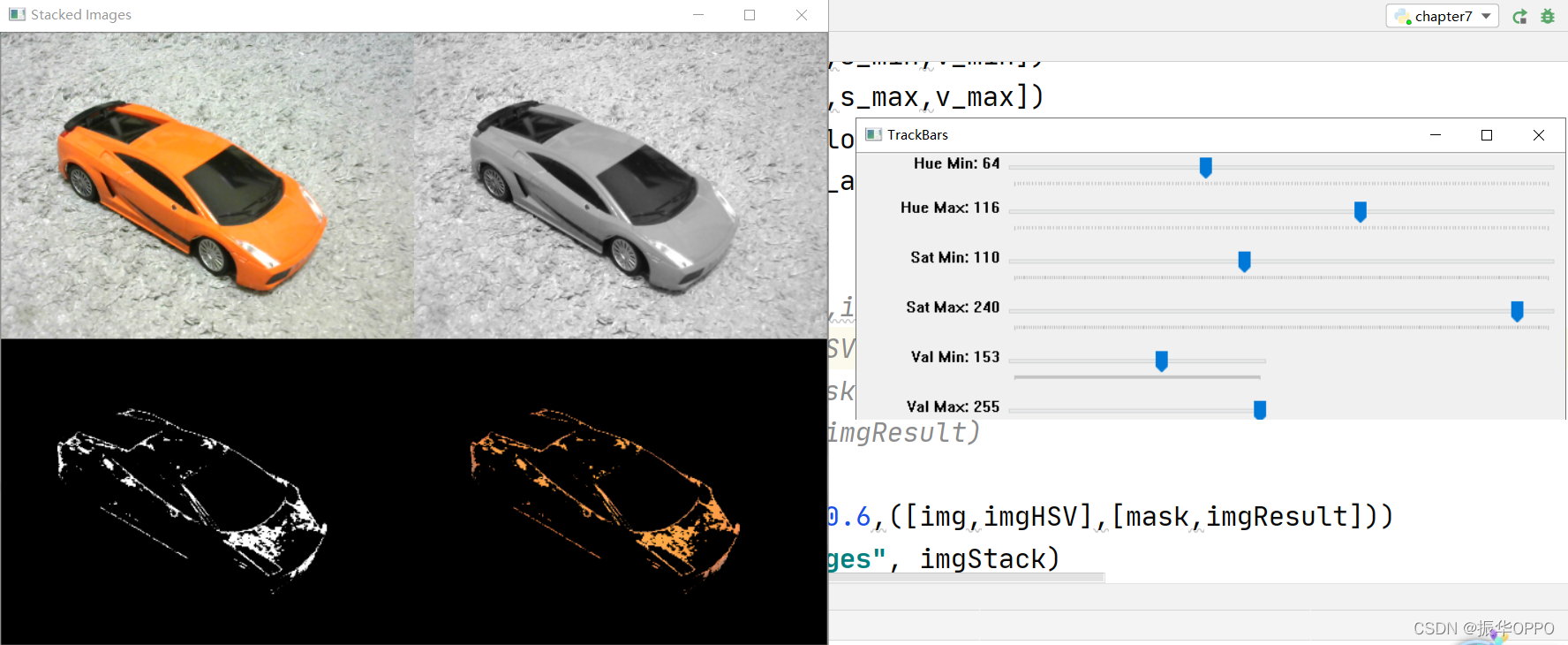
降低像素值范围,小车只会显示该范围内的颜色。