**
分别使用间接平差、秩亏自由网平差、拟稳平差求解最基本的水准网平差,仅做理解展示,代码较为简单。
**
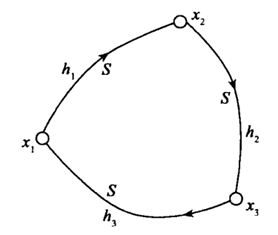
第一题
题目如下:


(1)间接平差
format short
clc
clear all
%已知数据:
h1=12.345;
h2=3.478;
h3=-15.817;
%近似值:各点近似高程为:
H10=0;
H20=12.345;
H30=15.823;
%间接平差
n=3;t=1;r=2;
%设x1点高程已知,为0m,x2,x3的平差值为xc2,xc3
x1=0;
%计算x2,x3的近似值x02,x03
x02=x1+h1;
x03=x1-h3;
%列观测方程
%hc1=Xc2-x1;
%hc2=-Xc2+Xc3;
%hc3=-Xc3+x1;
%设s路线长的观测误差中误差为单位权重中误差
%则权阵P
P=diag([1 1 1]);
B=[1 0;-1 1;0 -1]; %系数矩阵
l=[0 6 0];%常数阵,单位为mm
l=l';
N=(B')*P*B;%法方程系数阵
W=B'*P*l;%法方程常数阵
xc=inv(N)*W %参数计算
xc1=xc.*0.001;
Qxx=inv(N);%协因数阵
Qxx=sym(Qxx)%分数形式显示
M=l'*P*l-W'*xc;
sita=sqrt(M/r);%单位权中误差
xc2=xc1(1);
xc3=xc1(2);
%列误差方程
v1=xc2;
v2=-xc2+xc3-0.006;
v3=-xc3;
V=[v1 v2 v3];%改正数矩阵
V=V'
X0=[x02 x03];X0=X0';
Xc=X0+xc1 %参数平差值
h=[h1 h2 h3];
h=h';
H=h+V %高程平差值
(2)秩亏自由网平差
format short
clc
clear all
%已知数据:
h1=12.345;
h2=3.478;
h3=-15.817;
%近似值:各点近似高程为:
H01=0;
H02=12.345;
H03=15.823;
%秩亏自由网平差
n=3;t=1;r=2;
%列观测方程
%hc1=-Xc1+Xc2;;
%hc2=-Xc2+Xc3;
%hc3=Xc1-Xc3;
%设s路线长的观测误差中误差为单位权重中误差
%则权阵P
P=diag([1 1 1]);
B=[-1 1 0;0 -1 1;1 0 -1]; %系数矩阵
l=[0 0 6];%常数阵,单位为mm
l=l';
d=t-rank(B);
N=(B')*P*B;%法方程系数阵
W=B'*P*l;%法方程常数阵
Nm=N*pinv(N*N);%求伪逆
xc=Nm*W %参数计算
xcl=xc.*0.001;
Qxx=Nm*Nm*N;%协因数阵
Qxx=sym(Qxx)%分数形式显示
M=l'*P*l-W'*xc;
sita=sqrt(M/r);%单位权中误差
xc1=xcl(1);
xc2=xcl(2);
xc3=xcl(3);
%列误差方程
v1=-xc1+xc2;
v2=-xc2+xc3;
v3=xc1-xc3-0.006;
V=[v1 v2 v3];%改正数矩阵
V=V';
X0=[H01 H02 H03];X0=X0';
Xc=X0+xcl %高程参数平差值
h=[h1 h2 h3];
h=h';
H=h+V %高差平差值
第二题
题目如下:




拟稳平差
format short
clc
clear all
%已知据 :
h=[86.809 25.714 31.225 -71.952 -61.084 -44.178 10.847 16.350 11.409];
s=[204.1 188.7 344.8 149.2 142.9 250.0 128.2 98.0 196.1];
P=diag([0.049 0.053 0.029 0.067 0.070 0.040 0.078 0.102 0.051]);
%近似值:各点近似高程为
X0=[-0.004 86.806 14.846 25.706 31.216 42.626];
sita=1.85;
%经典自由网平差
%{
n=9;t=5;r=4;
%以6号点为固定点
x6=0;
%设x1,x2,x3,x4,x5的平差值为xc1,xc2,xc3,xc4,xc5
%计算x1,x2,x3,x4,x5的的近似值x01,x02,x03,x04,x05
x01=x6-h(6)-h(1);
x02=x6-h(6);
x03=x02+h(4);
x04=x02+h(5);
x05=x6-h(9);
h01=-x01+x02;
h02=-x01+x04;
h03=-x01+x05;
h04=-x02+x03;
h05=-x02+x04;
h06=-x02+x6;
h07=-x03+x04;
h08=-x03+x05;
h09=-x05+x6;
h0=[h01 h02 h03 h04 h05 h06 h07 h08 h09];
%{
列观测方程
hc1=-xc1+xc2;
hc2=-xc1+xc4;
hc3=-xc1+xc5;
hc4=-xc2+xc3;
hc5=-xc2+xc4;
hc6=-xc2+x6;
hc7=-xc3+xc4;
hc8=-xc3+xc5;
hc9=-xc5+x6;
%}
%计算常数阵
l=[0 0 0 0 0 0 0 0 0];
for i=1:9
l(i)=h(i)-h0(i);
end
l=l';
l=l.*1000; %常数项扩大1000倍
B=[-1 1 0 0 0
-1 0 0 1 0
-1 0 0 0 1
0 -1 1 0 0
0 -1 0 1 0
0 -1 0 0 0
0 0 -1 1 0
0 0 -1 0 1
0 0 0 0 -1 ];
N=(B')*P*B;%法方程系数阵
W=B'*P*l;%法方程常数阵
xc=inv(N)*W %参数计算
xcl=xc.*0.001
Qxx=inv(N);%协因数阵
Qxx=sym(Qxx)%分数形式显示
M=l'*P*l-W'*xc;
sita=sqrt(M/r);%单位权中误差
xc1=xcl(1);
xc2=xcl(2);
xc3=xcl(3);
xc4=xcl(4);
xc5=xcl(5);
l2=l./1000;%常数项缩小1000倍
%列误差方程
v1=-xc1+xc2-l2(1);
v2=-xc1+xc4-l2(2);
v3=-xc1+xc5-l2(3);
v4=-xc2+xc3-l2(4);
v5=-xc2+xc4-l2(5);
v6=-xc2+x6-l2(6);
v7=-xc3+xc4-l2(7);
v8=-xc3+xc5-l2(8);
v9=-xc5+x6-l2(9);
V=[v1 v2 v3 v4 v5 v6 v7 v8 v9 ];%改正数矩阵
V=V'
X00=[ x01 x02 x03 x04 x05];X00=X00';
Xc=X00+xcl %参数平差值
h=h';
H=h+V %高程平差值
%}
%秩亏自由网平差
%{
n=9;t=5;r=4;
%水准网中基准条件d=1
S=[1 1 1 1 1 1];
S=S';
Px=diag([1 1 1 1 1 1 ]);
%设x1,x2,x3,x4,x5,x6的平差值为xc1,xc2,xc3,xc4,xc5,xc6
%x1,x2,x3,x4,x5,x6的近似值x01,x02,x03,x04,x05,x06
x0=[-0.004 86.806 14.846 25.706 31.216 42.626];
%{
%列观测方程
hc1=-xc1+xc2;
hc2=-xc1+xc4;
hc3=-xc1+xc5;
hc4=-xc2+xc3;
hc5=-xc2+xc4;
hc6=-xc2+x6;
hc7=-xc3+xc4;
hc8=-xc3+xc5;
hc9=-xc5+x6;
%}
h01=-x0(1)+x0(2);
h02=-x0(1)+x0(4);
h03=-x0(1)+x0(5);
h04=-x0(2)+x0(3);
h05=-x0(2)+x0(4);
h06=-x0(2)+x0(6);
h07=-x0(3)+x0(4);
h08=-x0(3)+x0(5);
h09=-x0(5)+x0(6);
h0=[h01 h02 h03 h04 h05 h06 h07 h08 h09];
%计算常数阵
l=[0 0 0 0 0 0 0 0 0];
for i=1:9
l(i)=h(i)-h0(i);
end
l=l';
l=l.*1000; %常数项扩大1000倍
B=[-1 1 0 0 0 0
-1 0 0 1 0 0
-1 0 0 0 1 0
0 -1 1 0 0 0
0 -1 0 1 0 0
0 -1 0 0 0 1
0 0 -1 1 0 0
0 0 -1 0 1 0
0 0 0 0 -1 1 ];
N=(B')*P*B;%法方程系数阵
W=B'*P*l;%法方程常数阵
Z=Px*S*S'*Px;
xc=inv(N+Z)*W;
xcl=xc.*0.001
Qxx=inv(N+Z)*N*inv(N+Z);%协因数阵
Qxx=sym(Qxx)%分数形式显示
M=l'*P*l-W'*xc;
sita=sqrt(M/r)%单位权中误差
xc1=xcl(1);
xc2=xcl(2);
xc3=xcl(3);
xc4=xcl(4);
xc5=xcl(5);
xc6=xcl(6);
l2=l./1000;%常数项缩小1000倍
%列误差方程
v1=-xc1+xc2-l2(1);
v2=-xc1+xc4-l2(2);
v3=-xc1+xc5-l2(3);
v4=-xc2+xc3-l2(4);
v5=-xc2+xc4-l2(5);
v6=-xc2+xc6-l2(6);
v7=-xc3+xc4-l2(7);
v8=-xc3+xc5-l2(8);
v9=-xc5+xc6-l2(9);
V=[v1 v2 v3 v4 v5 v6 v7 v8 v9 ];%改正数矩阵
V=V'
x0=x0';
Xc=x0+xcl %参数平差值
h=h';
H=h+V %高程平差值
%}
%拟稳平差
n=9;t=5;r=4;
%水准网中基准条件d=1
S=[1 1 1 1 1 1];
S=S';
Px=diag([1 1 0 0 1 1 ]);
%设x1,x2,x3,x4,x5,x6的平差值为xc1,xc2,xc3,xc4,xc5,xc6
%x1,x2,x3,x4,x5,x6的近似值x01,x02,x03,x04,x05,x06
x0=[-0.004 86.806 14.846 25.706 31.216 42.626];
x0=x0';
%{
%列观测方程
hc1=-xc1+xc2;
hc2=-xc1+xc4;
hc3=-xc1+xc5;
hc4=-xc2+xc3;
hc5=-xc2+xc4;
hc6=-xc2+x6;
hc7=-xc3+xc4;
hc8=-xc3+xc5;
hc9=-xc5+x6;
%}
h01=-x0(1)+x0(2);
h02=-x0(1)+x0(4);
h03=-x0(1)+x0(5);
h04=-x0(2)+x0(3);
h05=-x0(2)+x0(4);
h06=-x0(2)+x0(6);
h07=-x0(3)+x0(4);
h08=-x0(3)+x0(5);
h09=-x0(5)+x0(6);
h0=[h01 h02 h03 h04 h05 h06 h07 h08 h09];
%计算常数阵
l=[0 0 0 0 0 0 0 0 0];
for i=1:9
l(i)=h(i)-h0(i);
end
l=l';
l=l.*1000; %常数项扩大1000倍
B=[-1 1 0 0 0 0
-1 0 0 1 0 0
-1 0 0 0 1 0
0 -1 1 0 0 0
0 -1 0 1 0 0
0 -1 0 0 0 1
0 0 -1 1 0 0
0 0 -1 0 1 0
0 0 0 0 -1 1 ];
N=(B')*P*B;%法方程系数阵
W=B'*P*l;%法方程常数阵
Z=Px*S*S'*Px;
xc=inv(N+Z)*W;
xcl=xc.*0.001
Qxx=inv(N+Z)*N*inv(N+Z); %协因数阵
Qxx=sym(Qxx)%分数形式显示
M=l'*P*l-W'*xc;
sita=sqrt(M/r);%单位权中误差
xc1=xcl(1);
xc2=xcl(2);
xc3=xcl(3);
xc4=xcl(4);
xc5=xcl(5);
xc6=xcl(6);
l2=l./1000;%常数项缩小1000倍
%列误差方程
v1=-xc1+xc2-l2(1);
v2=-xc1+xc4-l2(2);
v3=-xc1+xc5-l2(3);
v4=-xc2+xc3-l2(4);
v5=-xc2+xc4-l2(5);
v6=-xc2+xc6-l2(6);
v7=-xc3+xc4-l2(7);
v8=-xc3+xc5-l2(8);
v9=-xc5+xc6-l2(9);
V=[v1 v2 v3 v4 v5 v6 v7 v8 v9 ];%改正数矩阵
V=V'
Xc=x0+xcl %参数平差值
h=h';
H=h+V %高程平差值