
汽车制造是自动化程度最高的行业之一,但汽车主机厂、零部件厂超过一半的上下料、装配工序都是人工在作业,工作强度大、重复性高、招工困难;且由于汽车零部件种类多达数千种、人工送料偏差导致来料不规整等使得传统自动化无法应对柔性化的生产模式,越来越多汽车主机厂及零部件厂商开始布局AI视觉智能上下料、装配机器人。
汽车零部件上下料、装配
视觉识别痛点
在实际生产过程中,汽车零部件包括了外饰件、内饰件、发动机配件、传动系配件等不同类型,其外形各异且尺寸差别极大。
大部分汽车零部件上下料、装配采用人工作业,而依靠“AI机器视觉”与“工业机器人”结合进行零件上下料、装配有以下痛点:
► 零件种类繁多:零件种类繁多导致无法通过简单的吸盘及夹具实现抓取,且抓取过程中不允许对零件表面擦伤或出现吸痕,故需专门设计柔性夹具并以超高的视觉识别精度在特定姿态下实现抓取;
► 零件反光、易形变:外饰件大多为高反光件,对3D视觉成像与识别容易造成干扰,且抓取过程中容易发生形变,机器人放置治具或装配难度极大;
► 来料位置不稳定:人工摆料偏差、料车精度偏差、AGV送料偏差会导致零件来料位置与姿态变化较大,AI机器视觉定位零件难度加大;
► 放置精度要求高:零件在下料之后要进行多道组装工序,需要以非常精确的姿态放置到下料治具上,零件形变导致机器人放置容易出现误差。

△黑色且反光严重

△ 零件易变形、划伤
上料装配工作站
SpeedLoader-M
视比特机器人面向汽车主机厂、汽车零部件厂的上下料、分拣、装配等场景,自主研发了基于“AI+3D视觉”的机器人上料装配工作站(SpeedLoader-M),依托3D视觉高精度定位算法、3D视觉高精度纠偏算法,实现了对多品类、无序来料的汽车零部件高精度定位抓取及高精度纠偏放置,在汽车全自动柔性机器人生产线中该套系统可实现敏捷开发、快速部署。
此外,上料装配工作站(SpeedLoader-M)可对接MES、SCADA等系统,与AGV等下游设备联动,实现不同品类、多姿态摆放的零件高精度柔性抓取与放置。
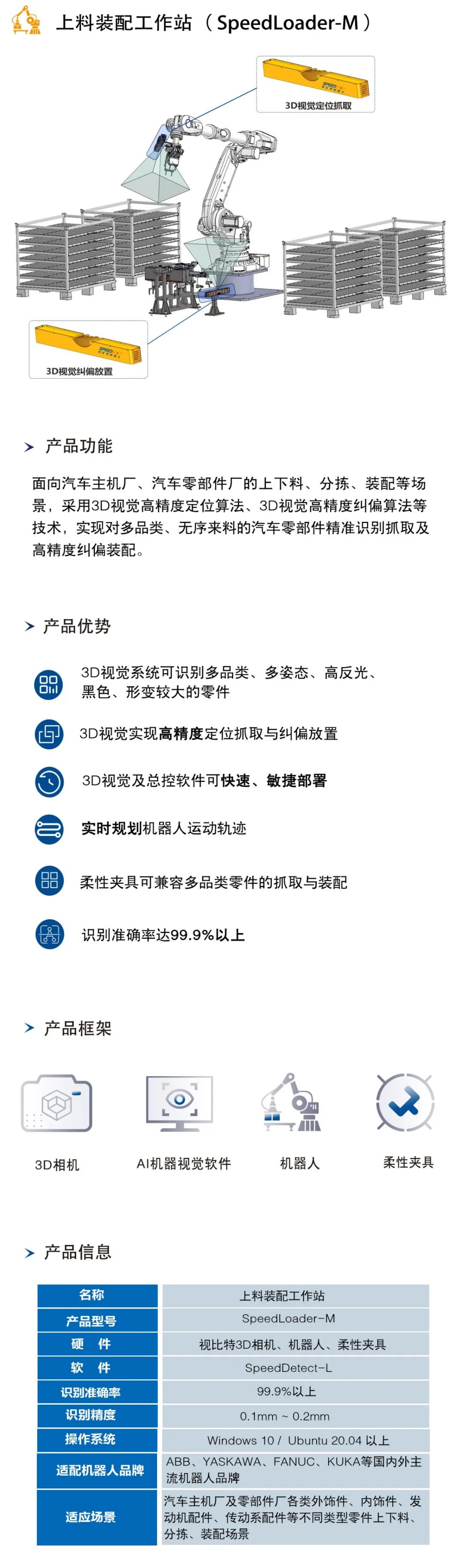
△产品信息表
△精准定位深框抓取零件
△精准纠偏放置零件
核心优势
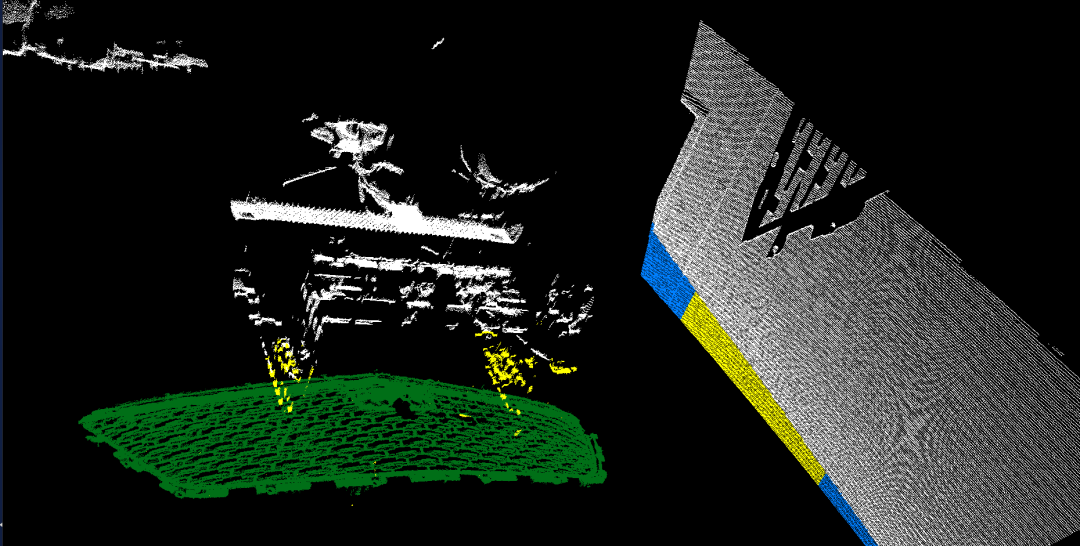
► 首创3D点云配准算法
首次开创性的将 Transformer 网络运用到3D点云处理,实现高效实时的点云配准算法;通过此配准算法,可以获得待抓取零件的准确姿态,为机器人提供高精度抓取信息与放置信息;此外,基于深度学习网络的点云配准算法,具有抗干扰能力强、稳定性高、实时性强的特点,且针对因零件反光导致的点云缺失,有一定的兼容性。
► 基于3D点云的高精度定位抓取
通过将零件的三维模型与实时拍摄的三维点云进行精确配准,可引导机器人对料箱中堆叠的高反光零件进行精准抓取;此外,视比特自主研发的机器人驱动程序可实时规划机器人运动轨迹,在对深达1.5m的料框内零件进行抓取的同时,主动避开固定工件的金属立柱与料箱四壁,此过程中视觉识别精度可达到0.1mm~0.2mm。
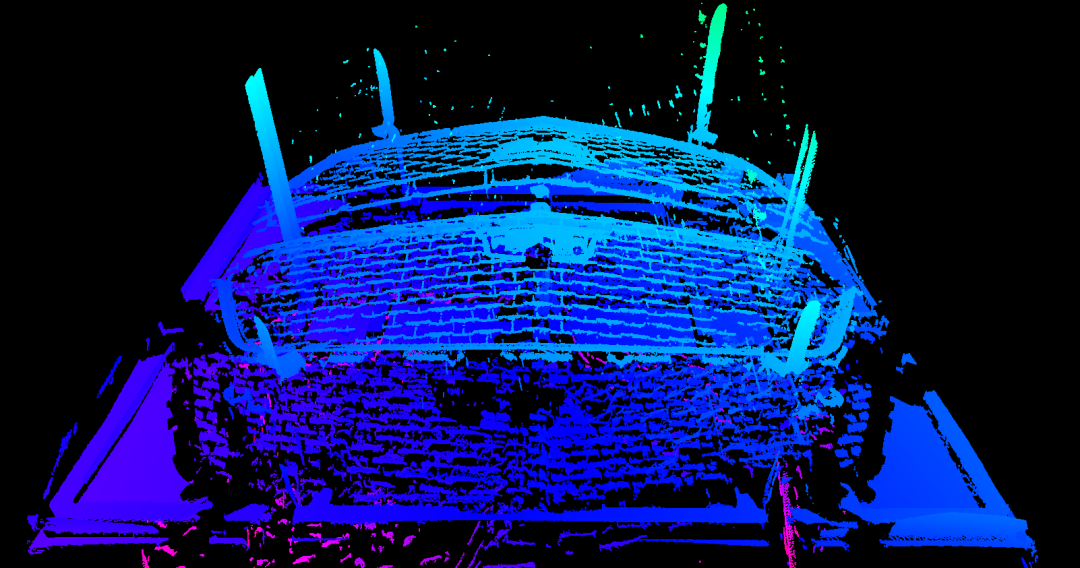
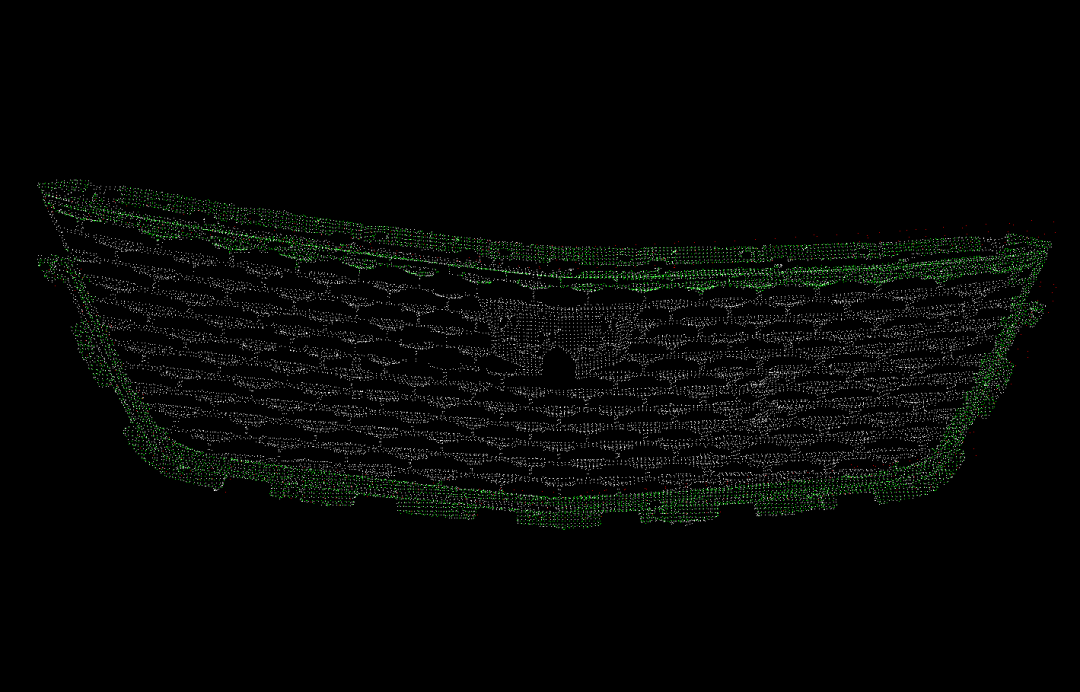
△点云成像效果
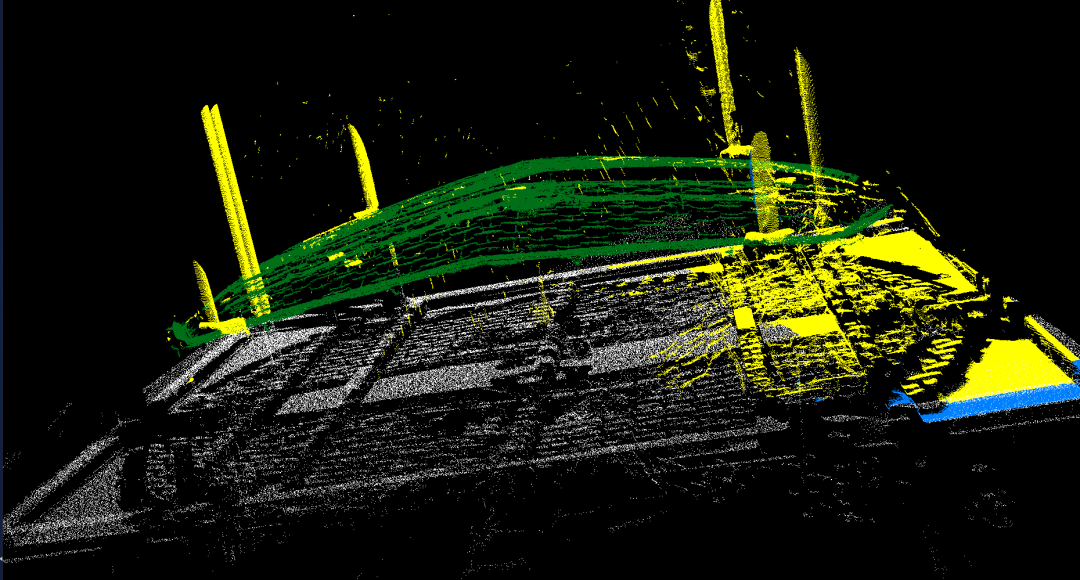
△ 点云提取效果
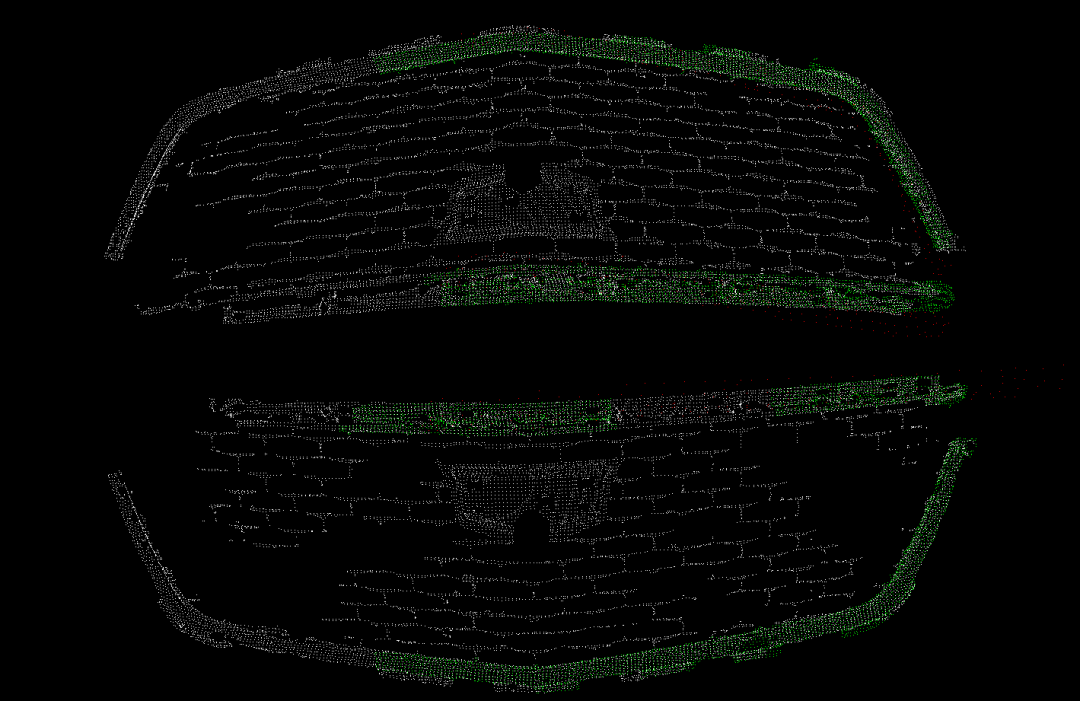
△点云匹配效果
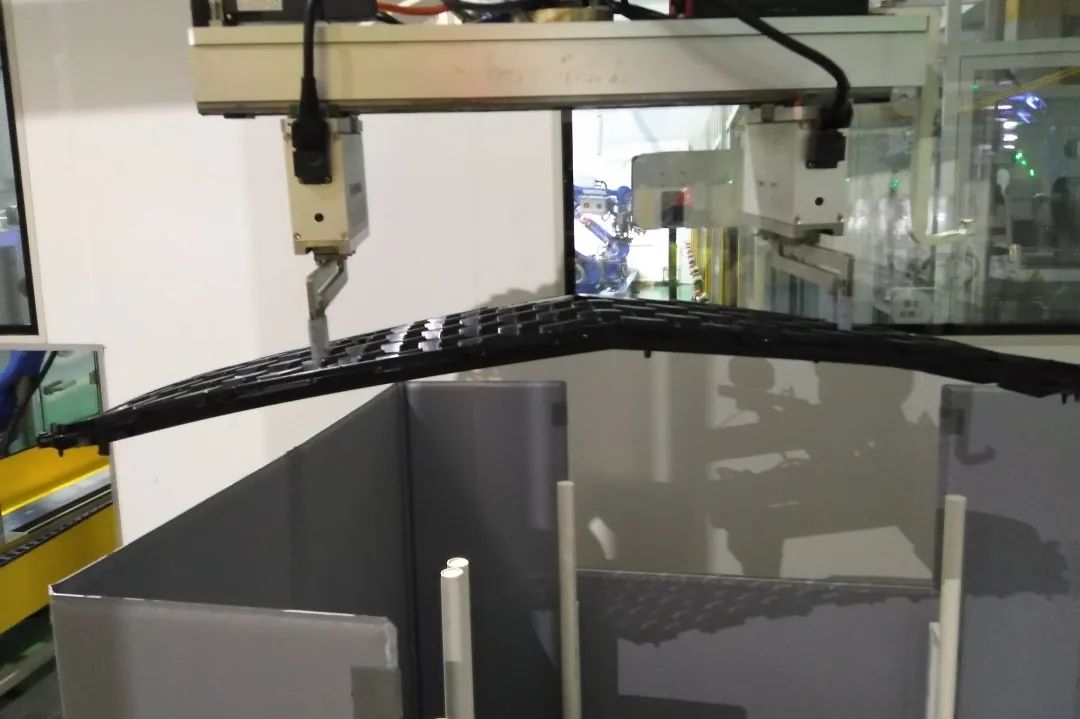
△精准深框抓取实物
► 基于3D点云的高精度纠偏放置
利用3D识别定位算法实现抓取过程逆运算,将机器人末端夹具上的零件按工序要求精确放置于治具中,并对零件进行高精度3D纠偏,此过程视觉识别精度同样可达0.1mm~0.2mm。

△点云成像效果
△ 点云提取效果
△点云匹配效果

△ 3D精准纠偏放置
► 定制化柔性夹具
工作站采用视比特自主设计的柔性夹具,可兼容多种规格汽车外饰件的灵活抓取,并融入脱料机构,确保上下层零件有效分离,且保障零件不被划伤。
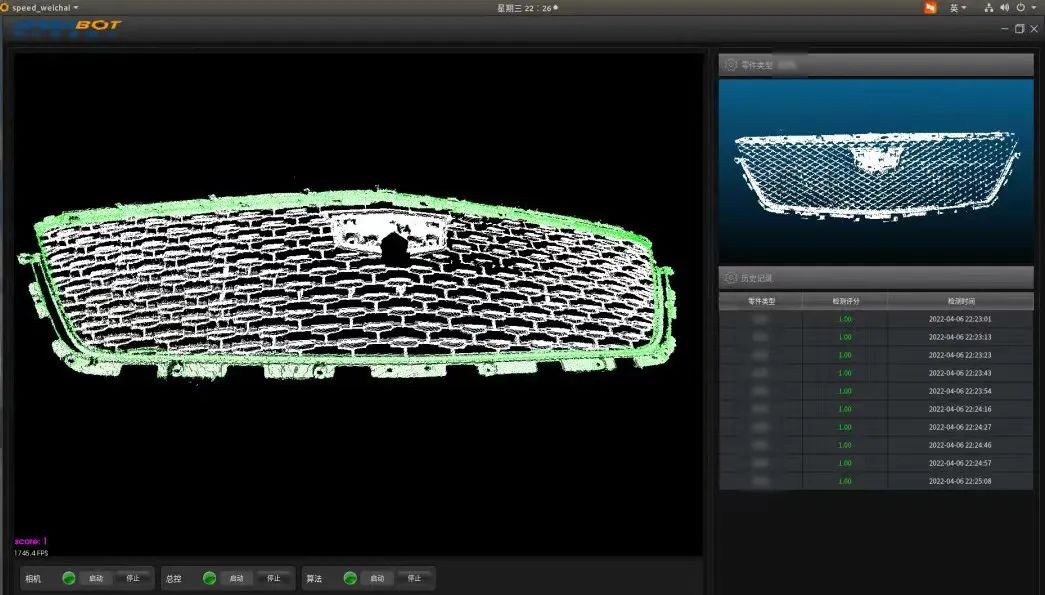
► 3D视觉软件界面
应用案例
批量落地于某汽车零部件未来工厂
在某汽车零部件龙头企业的黑灯工厂内,数十台AGV、工业机器人共同完成多款车型的外饰件“自动注塑—AGV转运—立库暂存—AGV转运—视觉上下料—自动装配—质检—装箱”全自动化生产。外饰件大多为高反光、易形变的塑料零件,且自动化生产线须兼容不同规格零件的柔性生产。
在黑灯工厂中,视比特自主研发的上料装配工作站(SpeedLoader-M)实现了对料框中多规格、高反光、形变较大的外饰件进行精准识别抓取,再通过3D视觉完成高精度3D纠偏后放置到二次治具中。此外,自动化生产线可依据MES下发订单并准确快速切换到不同产品的全自动生产装配,真正意义上实现柔性化生产。
案例视频

推动技术深度融合,持续助推行业智造升级
当制造模式开始变革,“AI机器视觉”更能充分发挥柔性生产的优势。视比特机器人与控股子公司敏视启源为汽车智造行业持续推出多个高效、柔性及高性价比的AI机器视觉产品系列,包括大尺寸工件超高精度测量专机、缺陷检测专机、视觉引导机器人上下料、装配等,不断助推汽车产业转型升级。
未来,视比特将始终秉承“软件定义工业智能”的核心使命,打造多行业维度产品矩阵,推动AI与机器视觉更多场景的产品落地,以硬核本领铸造企业“护城河”。
关于视比特机器人
湖南视比特机器人有限公司成立于2018年,总部位于长沙,研发总部位于上海,并在温哥华、塞尔维亚、捷克设立了办事处,是一家致力于打造面向智能产线与智慧工厂最强控制大脑的高科技公司。依托强大的3D视觉核心算法与工业级系统软件能力,着力打造单机器人柔性制造工作站、多机器人协同共融产线、高精度视觉检测装备等产品体系。用软件定义智能,为制造赋予智慧。
成立以来,已完成5轮融资,天使轮由图灵创投领投,A轮近亿元融资由和玉资本领投,A+轮过亿元融资由中金资本领投。公司在3D视觉算法、机器人柔性控制、手眼协同融合、产线级机器人协同、工厂级智能规划与调度等方面均有国际领先技术和行业落地应用,在重工业智能分拣产线、大尺寸高精度三维量测、智能物流搬运机器人等方面填补了国内空白。视比特的多个核心产品已经在工程机械、智慧物流、汽车工业量测等领域大面积交付使用,面向行业头部标杆客户,解决国家“卡脖子”难题,在业内享有良好口碑。
简历投递:[email protected]
商务联系:[email protected]

视比特机器人
www.speedbot.net
400-631-8686