在深度学习(图像领域)中,为了提升训练样本数量数据增广是非常常见的手段。比如:
- 随机水平翻转
- 随机色调(H)、饱和度(S)、明度(V)调整
- 随机旋转,缩放,平移以及错切
- 还有近几年常用的mixup,mosaic等等。
今天简单讲讲随机旋转,缩放,平移以及错切方法,因为在之前yolov3 spp项目的数据读取部分有涉及到相关知识。本文会结合opencv来进行演示。
仿射变换
仿射变换的原理不在这里赘述,变换前后满足平直性(变换前是直线变换后还是直线)和平行性(变换前平行的线变换后依旧平行),参考博文。在opencv中可以通过仿射变换来实现旋转,缩放,平移以及错切等一系列操作。仿射变换的矩阵乘法形式如下,其中 x , y x,y x,y是变换前的坐标, x ′ , y ′ {x}',{y}' x′,y′是变换后的坐标。其中 m 11 , m 12 , m 21 , m 22 m_{11},m_{12},m_{21},m_{22} m11,m12,m21,m22为线性变换参数, m 13 , m 23 m_{13},m_{23} m13,m23为平移参数。如果仿射矩阵是对角矩阵,相当于不做任何操作。看到公式不要怕,后面会针对具体示例进行解释:
[ x ′ y ′ 1 ] = [ m 11 m 12 m 13 m 21 m 22 m 23 0 0 1 ] [ x y 1 ] \begin{bmatrix} {x}' \\ {y}'\\ 1 \end{bmatrix} = \begin{bmatrix} m_{11}\ \ m_{12}\ \ m_{13} \\ m_{21}\ \ m_{22}\ \ m_{23} \\ 0\ \ \ \ \ \ 0\ \ \ \ \ \ 1 \end{bmatrix} \begin{bmatrix} x\\ y\\ 1 \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡m11 m12 m13m21 m22 m230 0 1⎦⎤⎣⎡xy1⎦⎤
旋转、平移与缩放
首先再次强调下图像处理中的坐标系,水平向右为x轴正方向,竖直向下为y轴正方向。
对于图像的旋转,缩放,平移都可以直接通过使用opencv提供的getRotationMatrix2D方法来求得仿射矩阵,需要传入旋转中心center,旋转角度angle(逆时针为正),以及缩放因子scale,假设以图片中心为旋转中心,顺时针旋转30度(opencv里是以逆时针为正,所以angle=-30),并缩放0.5倍:
import cv2
img = cv2.imread("1.png")
h, w = img.shape[0], img.shape[1]
m = cv2.getRotationMatrix2D(center=(w // 2, h // 2), angle=-30, scale=0.5)
print(m)
得到的旋转矩阵参数如下:
[[0.433 -0.25 198.14]
[0.25 0.433 16.25]]
接着使用opencv中的cv2.warpAffine的方法利用求得的仿射矩阵做仿射变换,其中src为原图像,M为仿射矩阵,dsize为输出图像的大小,borderValue为边界填充颜色(注意是BGR顺序, ( 0 , 0 , 0 ) (0,0,0) (0,0,0)代表黑色):
import cv2
img = cv2.imread("1.png")
h, w = img.shape[0], img.shape[1]
m = cv2.getRotationMatrix2D(center=(w // 2, h // 2), angle=-30, scale=0.5)
r_img = cv2.warpAffine(src=img, M=m, dsize=(w, h), borderValue=(0, 0, 0))
cv2.imshow("origin", img)
cv2.imshow("rotation_scale_trans", r_img)
cv2.waitKey(0)
如图,左边是原图,右边是旋转、缩放、平移后的图片(注意,旋转后如果有超出指定范围dsize的像素都会被截去)。

接着结合上面的仿射变换公式来讲(不想看理论的可以跳过)。其中 m 11 , m 12 , m 21 , m 22 m_{11},m_{12},m_{21},m_{22} m11,m12,m21,m22为线性变换参数(沿坐标原点旋转就是一个简单的线性变换), m 13 , m 23 m_{13},m_{23} m13,m23为平移参数(分别对应x轴方向平移和y轴方向平移)。
[ m 11 m 12 m 13 m 21 m 22 m 23 0 0 1 ] \begin{bmatrix} m_{11}\ \ m_{12}\ \ m_{13} \\ m_{21}\ \ m_{22}\ \ m_{23} \\ 0\ \ \ \ \ \ 0\ \ \ \ \ \ 1 \end{bmatrix} ⎣⎡m11 m12 m13m21 m22 m230 0 1⎦⎤
上面的操作其实可以分解成三步,第一步沿坐标原点旋转,第二步缩放图片,第三步平移图片。

对于第一步的原点旋转对应的仿射矩阵为(通过cv2.getRotationMatrix2D(center=(0, 0), angle=-30, scale=1.0)求得):
[ 0.866 − 0.5 0 0.5 0.866 0 0 0 1 ] \begin{bmatrix} 0.866\ \ -0.5\ \ 0 \\ 0.5\ \ \ \ \ \ 0.866\ \ \ 0 \\ 0\ \ \ \ \ \ \ \ \ \ 0\ \ \ \ \ \ \ \ \ 1 \end{bmatrix} ⎣⎡0.866 −0.5 00.5 0.866 00 0 1⎦⎤
当然这里也可以直接使用旋转矩阵模板来计算,但需要注意的是模板里的旋转矩阵默认y轴是竖直向上的,但图像处理中y轴是竖直向下的,且都是以逆时针旋转为正,所以这里的 θ = 30 ° \theta=30\degree θ=30°:
[ c o s ( θ ) − s i n ( θ ) 0 s i n ( θ ) c o s ( θ ) 0 0 0 1 ] \begin{bmatrix} cos(\theta)\ \ -sin(\theta)\ \ 0 \\ sin(\theta)\ \ \ \ \ \ cos(\theta)\ \ \ 0 \\ 0\ \ \ \ \ \ \ \ \ \ \ \ \ \ 0\ \ \ \ \ \ \ \ \ \ \ \ 1 \end{bmatrix} ⎣⎡cos(θ) −sin(θ) 0sin(θ) cos(θ) 00 0 1⎦⎤
对于第二步图片的缩放,直接使用如下缩放矩阵:
[ S x 0 0 0 S y 0 0 0 1 ] \begin{bmatrix} S_x\ \ \ \ 0 \ \ \ \ 0 \\ 0\ \ \ \ S_y\ \ \ \ 0 \\ 0\ \ \ \ 0\ \ \ \ 1 \end{bmatrix} ⎣⎡Sx 0 00 Sy 00 0 1⎦⎤
假设要将图片缩放0.5倍,那么缩放矩阵为:
[ 0.5 0 0 0 0.5 0 0 0 1 ] \begin{bmatrix} 0.5\ \ \ \ 0 \ \ \ \ \ 0 \\ 0\ \ \ \ \ 0.5\ \ \ \ 0 \\ 0\ \ \ \ \ \ 0\ \ \ \ \ \ 1 \end{bmatrix} ⎣⎡0.5 0 00 0.5 00 0 1⎦⎤
将旋转和缩放结合起来就是(注意顺序),由于矩阵乘法满足结合律所以可以将两个仿射矩阵相乘:
[ x ′ y ′ 1 ] = [ 0.5 0 0 0 0.5 0 0 0 1 ] ( [ 0.866 − 0.5 0 0.5 0.866 0 0 0 1 ] [ x y 1 ] ) = [ 0.433 − 0.25 0 0.25 0.433 0 0 0 1 ] [ x y 1 ] \begin{bmatrix} {x}' \\ {y}'\\ 1 \end{bmatrix} = \begin{bmatrix} 0.5\ \ \ \ 0 \ \ \ \ \ 0 \\ 0\ \ \ \ \ 0.5\ \ \ \ 0 \\ 0\ \ \ \ \ \ 0\ \ \ \ \ \ 1 \end{bmatrix} \left ( \begin{bmatrix} 0.866\ \ -0.5\ \ 0 \\ 0.5\ \ \ \ \ \ 0.866\ \ \ 0 \\ 0\ \ \ \ \ \ \ \ \ \ 0\ \ \ \ \ \ \ \ \ 1 \end{bmatrix} \begin{bmatrix} x\\ y\\ 1 \end{bmatrix} \right ) \\ \ \\ = \begin{bmatrix} 0.433\ \ -0.25\ \ 0 \\ 0.25\ \ \ \ \ \ 0.433\ \ \ 0 \\ 0\ \ \ \ \ \ \ \ \ \ \ 0\ \ \ \ \ \ \ \ \ \ 1 \end{bmatrix} \begin{bmatrix} x\\ y\\ 1 \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡0.5 0 00 0.5 00 0 1⎦⎤⎝⎛⎣⎡0.866 −0.5 00.5 0.866 00 0 1⎦⎤⎣⎡xy1⎦⎤⎠⎞ =⎣⎡0.433 −0.25 00.25 0.433 00 0 1⎦⎤⎣⎡xy1⎦⎤
对于第三步图片的平移,即将旋转、缩放后的图像中心移至原图像中心。这里示例中的图片 w = 564 , h = 307 w=564,h=307 w=564,h=307,故原图片中心点坐标是 ( 282 , 153 ) (282, 153) (282,153),旋转后的中心点坐标是 ( 83.86 , 136.75 ) (83.86, 136.75) (83.86,136.75),
[ 83.86 136.75 1 ] = [ 0.433 − 0.25 0 0.25 0.433 0 0 0 1 ] [ 282 153 1 ] \begin{bmatrix} 83.86 \\ 136.75\\ 1 \end{bmatrix} = \begin{bmatrix} 0.433\ \ -0.25\ \ 0 \\ 0.25\ \ \ \ \ \ 0.433\ \ \ 0 \\ 0\ \ \ \ \ \ \ \ \ \ \ 0\ \ \ \ \ \ \ \ \ \ 1 \end{bmatrix} \begin{bmatrix} 282\\ 153\\ 1 \end{bmatrix} ⎣⎡83.86136.751⎦⎤=⎣⎡0.433 −0.25 00.25 0.433 00 0 1⎦⎤⎣⎡2821531⎦⎤
所以需要向x轴正方向平移 282 − 83.73 = 198.14 282-83.73=198.14 282−83.73=198.14,向y轴正方向平移 153 − 136.75 = 16.25 153-136.75=16.25 153−136.75=16.25,刚上面说了 m 13 , m 23 m_{13},m_{23} m13,m23为平移参数(分别对应x轴方向平移和y轴方向平移)所以 m 13 = 198.14 , m 23 = − 16.25 m_{13}=198.14, m_{23}=-16.25 m13=198.14,m23=−16.25(在对角矩阵的基础上设置 m 13 , m 23 m_{13},m_{23} m13,m23即可)
[ 1 0 198.14 0 1 16.25 0 0 1 ] \begin{bmatrix} 1\ \ \ \ 0 \ \ \ \ \ 198.14 \\ 0\ \ \ \ 1\ \ \ \ \ \ 16.25 \\ 0\ \ \ \ 0\ \ \ \ \ \ \ \ \ \ \ \ \ 1 \end{bmatrix} ⎣⎡1 0 198.140 1 16.250 0 1⎦⎤
和旋转缩放后的仿射矩阵进一步结合起来:
[ x ′ y ′ 1 ] = [ 1 0 198.14 0 1 16.25 0 0 1 ] ( [ 0.433 − 0.25 0 0.25 0.433 0 0 0 1 ] [ x y 1 ] ) = [ 0.433 − 0.25 198.14 0.25 0.433 16.25 0 0 1 ] [ x y 1 ] \begin{bmatrix} {x}' \\ {y}'\\ 1 \end{bmatrix} = \begin{bmatrix} 1\ \ \ \ 0 \ \ \ \ \ 198.14 \\ 0\ \ \ \ 1\ \ \ \ \ \ 16.25 \\ 0\ \ \ \ 0\ \ \ \ \ \ \ \ \ \ \ \ \ 1 \end{bmatrix} \left ( \begin{bmatrix} 0.433\ \ -0.25\ \ 0 \\ 0.25\ \ \ \ \ \ 0.433\ \ \ 0 \\ 0\ \ \ \ \ \ \ \ \ \ \ 0\ \ \ \ \ \ \ \ \ \ 1 \end{bmatrix} \begin{bmatrix} x\\ y\\ 1 \end{bmatrix} \right ) \\ \ \\ = \begin{bmatrix} 0.433\ \ -0.25\ \ 198.14 \\ 0.25\ \ \ \ \ \ 0.433\ \ \ 16.25 \\ 0\ \ \ \ \ \ \ \ \ \ \ 0\ \ \ \ \ \ \ \ \ \ 1 \end{bmatrix} \begin{bmatrix} x\\ y\\ 1 \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡1 0 198.140 1 16.250 0 1⎦⎤⎝⎛⎣⎡0.433 −0.25 00.25 0.433 00 0 1⎦⎤⎣⎡xy1⎦⎤⎠⎞ =⎣⎡0.433 −0.25 198.140.25 0.433 16.250 0 1⎦⎤⎣⎡xy1⎦⎤
这个矩阵刚好和前面使用opencv方法cv2.getRotationMatrix2D(center=(w // 2, h // 2), angle=-30, scale=0.5)得到的矩阵是一样的(前两行)。注意处理的顺序,先旋转,在缩放,最后平移(顺序不一样结果不同)。opencv中得到的矩阵是 2 × 3 2\times3 2×3的,我们自己刚刚算的是 3 × 3 3\times3 3×3的仿射矩阵,最后使用cv2.warpAffine时只用传入前两行就行了。这是使用 3 × 3 3\times3 3×3的矩阵是为了方便将多个仿射矩阵进行相乘操作。
错切
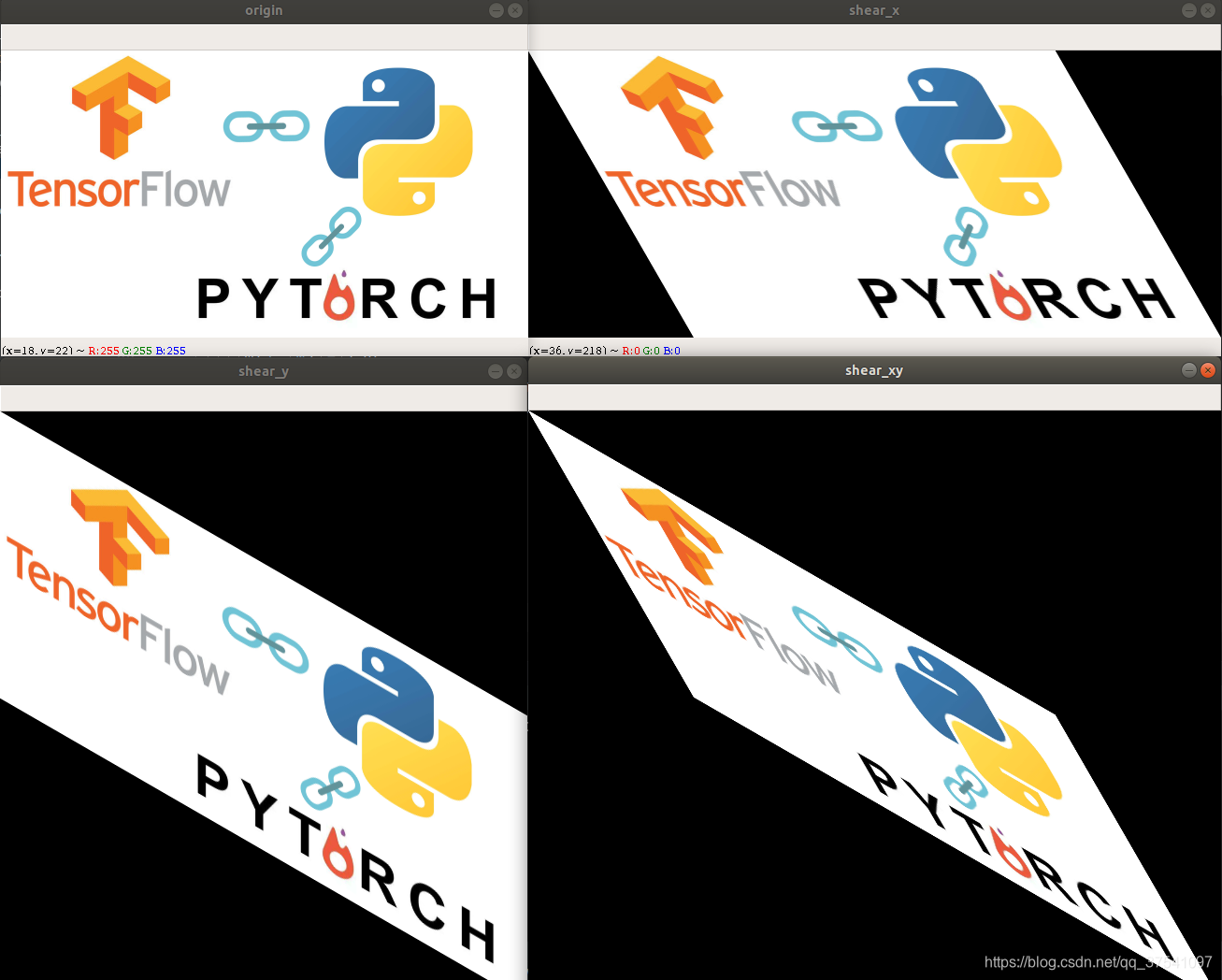
图像的错切变换实际上是平面景物在投影平面上的非垂直投影效果。图像错切变换也称为图像剪切、错位或错移变换,参考博文。一般错切分为横向错切,纵向错切,当然也可以两个方向同时进行错切。下图分别展示了沿x轴方向错切,y轴方向错切,以及同时沿x,y轴两个方向错切的效果。
在opencv中并没有直接针对错切生成仿射矩阵的方法,所以我们自己可以构建错切对应的仿射矩阵,然后利用cv2.warpAffine进行仿射变换即可。下面是错切对应的仿射矩阵,其中 θ \theta θ表示错切角度, t a n ( θ 1 ) tan(\theta_{1}) tan(θ1)是x轴方向的错切参数, t a n ( θ 2 ) tan(\theta_{2}) tan(θ2)是y轴方向的错切参数。
[ x ′ y ′ 1 ] = [ 1 t a n ( θ 1 ) 0 t a n ( θ 2 ) 1 0 0 0 1 ] [ x y 1 ] \begin{bmatrix} {x}' \\ {y}'\\ 1 \end{bmatrix} = \begin{bmatrix} 1\ \ \ \ \ \ \ \ \ \ \ tan(\theta_{1}) \ \ \ \ \ 0 \\ tan(\theta_{2})\ \ \ \ \ \ \ \ \ \ 1\ \ \ \ \ \ 0 \\ 0\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ 0 \ \ \ \ \ \ 1 \end{bmatrix} \begin{bmatrix} x\\ y\\ 1 \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡1 tan(θ1) 0tan(θ2) 1 00 0 1⎦⎤⎣⎡xy1⎦⎤
假设要沿水平方向错切 30 ° 30\degree 30°,那么仿射矩阵为:
[ 1 0.577 0 0 1 0 0 0 1 ] \begin{bmatrix} 1\ \ \ \ \ \ 0.577 \ \ \ \ \ 0 \\ 0\ \ \ \ \ \ \ \ \ \ \ 1\ \ \ \ \ \ \ 0 \\ 0\ \ \ \ \ \ \ \ \ \ \ 0 \ \ \ \ \ \ \ 1 \end{bmatrix} ⎣⎡1 0.577 00 1 00 0 1⎦⎤
import math
import cv2
import numpy as np
img = cv2.imread("1.png")
cv2.imshow("origin", img)
h, w = img.shape[0], img.shape[1]
origin_coord = np.array([[0, 0, 1], [w, 0, 1], [w, h, 1], [0, h, 1]])
theta = 30 # shear角度
tan = math.tan(math.radians(theta))
# x方向错切
m = np.eye(3)
m[0, 1] = tan
shear_coord = (m @ origin_coord.T).T.astype(np.int)
shear_img = cv2.warpAffine(src=img, M=m[:2],
dsize=(np.max(shear_coord[:, 0]), np.max(shear_coord[:, 1])),
borderValue=(0, 0, 0))
cv2.imshow("shear_x", shear_x)
cv2.waitKey(0)