MobileNetv1
MobileNet的由来:谷歌在2017年提出了,专注于移动端或者嵌入式设备中的轻量级CNN网络,其最大的创新点是,提出了深度可分离卷积(depthwise separable convolution)
论文地址:https://arxiv.org/pdf/1704.04861.pdf
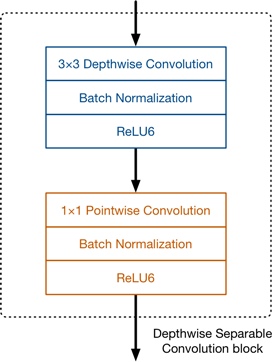
下图显示depthwise separable convolution的合成过程

分析depthwise separable convolution在计算量上和标准卷积的差别
- 输入的特征图的大小是: i n w i d t h ∗ i n h e i g h t ∗ i n c h a n n e l in_{width} * in_{height} * in_{channel} inwidth∗inheight∗inchannel
- 输出的特征图的大小是: o u t w i d t h ∗ o u t h e i g h t ∗ o u t c h a n n e l out_{width} * out_{height} * out_{channel} outwidth∗outheight∗outchannel
- 卷积核的大小定义为: k ∗ k k * k k∗k
计算计算量
- 标准卷积的计算量: k ∗ k ∗ o u t c h a n n e l ∗ i n c h a n n e l ∗ o u t w i d t h ∗ o u t h e i g h t k * k * out_{channel} * in_{channel} * out_{width} * out_{height} k∗k∗outchannel∗inchannel∗outwidth∗outheight
- depthwise convolution的计算量: k ∗ k ∗ i n c h a n n e l ∗ o u t w i d t h ∗ o u t h e i g h t k * k * in_{channel} * out_{width} * out_{height} k∗k∗inchannel∗outwidth∗outheight
- pointwise convolution的计算量: i n c h a n n e l ∗ o u t c h a n n e l ∗ o u t w i d t h ∗ o u t h e i g h t in_{channel} * out_{channel} * out_{width} * out_{height} inchannel∗outchannel∗outwidth∗outheight
- depthwise separable convolution的总计算量:
k ∗ k ∗ i n c h a n n e l ∗ o u t w i d t h ∗ o u t h e i g h t + i n c h a n n e l ∗ o u t c h a n n e l ∗ o u t w i d t h ∗ o u t h e i g h t k * k * in_{channel} * out_{width} * out_{height} + in_{channel} * out_{channel} * out_{width} * out_{height} k∗k∗inchannel∗outwidth∗outheight+inchannel∗outchannel∗outwidth∗outheight - depthwise separable convolution和标准卷积的比较:
k ∗ k ∗ i n c h a n n e l ∗ o u t w i d t h ∗ o u t h e i g h t + i n c h a n n e l ∗ o u t c h a n n e l ∗ o u t w i d t h ∗ o u t h e i g h t k ∗ k ∗ o u t c h a n n e l ∗ i n c h a n n e l ∗ o u t w i d t h ∗ o u t h e i g h t = 1 o u t c h a n n e l + 1 k 2 \frac{k * k * in_{channel} * out_{width} * out_{height} + in_{channel} * out_{channel} * out_{width} * out_{height}}{k * k * out_{channel} * in_{channel} * out_{width} * out_{height}} = \frac{1}{out_{channel}} + \frac{1}{k^2} k∗k∗outchannel∗inchannel∗outwidth∗outheightk∗k∗inchannel∗outwidth∗outheight+inchannel∗outchannel∗outwidth∗outheight=outchannel1+k21

从公式上,我们能看出,如果卷积核的大小为3的时候,depthwise separable convolution 可以降低大约8-9倍的计算量!!!
MobileNetv1的模型架构如下:(左侧是标准卷积;右侧是MobileNetv1卷积模型)

注意一点:MobileNetV1中使用的ReLU使用的是ReLU6
R e L U 6 = m i n ( m a x ( f e a t u r e s , 0 ) , 6 ) ReLU6 = min(max(features, 0), 6) ReLU6=min(max(features,0),6)

ReLU6和ReLU的对比图

使用ReLU6的目的
主要是为了在移动端float16的低精度的时候,也能有很好的数值分辨率,如果对ReLu的输出值不加限制,那么输出范围就是0到正无穷,而低精度的float16无法精确描述其数值,带来精度损失。
具体的卷积流程


- Mult-Adds:当前模块参与整个网络的计算程度
- Parmaeters:当前模型占有整个网络的参数量
说明一点:
MobileNetv1为了提高计算速度,谷歌采用扩大分辨率,减小宽度的方法。


但是需要注意的是:
在训练过程中,mobileNet的速度大概是VGG的3倍,但是在同样的训练集open image下,mobileNet 的mAP要比VGG低20个点左右。
(0): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=128, bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
(3): Conv2d(128, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(4): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): ReLU6(inplace=True)
MobileNetv2
论文:《Inverted Residuals and Linear Bottlenecks: Mobile Networks for Classification, Detection and Segmentation》
MobileNetv2相比于MobileNetv1做了两个改进(从论文上不难看出):Inverted Residuals and Linear Bottlenecks

从上图中,我们不难看出,MobileNet v2在Depthwise convolution之前添加一层Pointwise convolution
so,为什么添加一层Pointwise convolution?
- 当加一层Pointwise convolution就可以升维,也可以降维;
- 在MobileNet v2中加的这一层是用做升维;
- Pointwise卷积升维之后,Depthwise卷积就可以在高维度工作。
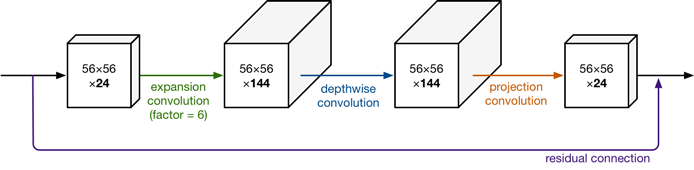
这一层的Pointwise 卷积就可以叫expansion卷积,这一层就可以叫expansion layer,因为它用来升维了。
升了多少倍或者说通道扩大了多少倍就有了expansion factor:144/24=6倍

t:通道扩张倍数
c:输出通道数
n:重复次数
s:stride
Inverted residuals
什么是Inverted residuals?inverted residuals:倒残差
和残差结构的区别如下:

为什么叫做倒残差呢?

Inverted residual 的实现
import torch.nn as nn
from torch.nn import functional as F
class InvertedResidual(nn.Module):
def __init__(self, in_features, out_features, stride, expand_ratio,activation=nn.ReLU6) :
super(InvertedResidual, self).__init__()
self.stride = stride
assert stride in [1, 2]
hidden_dim = in_features * expand_ratio
self.is_residual = self.stride == 1 and in_features == out_features
self.conv = nn.Sequential(
# pw Point-wise
nn.Conv2d(in_features, hidden_dim, 1, 1, 0, bias=False),
nn.BatchNorm2d(hidden_dim),
activation(inplace=True),
# dw Depth-wise
nn.Conv2d(hidden_dim, hidden_dim, 3, stride, 1, groups=hidden_dim, bias=False),
nn.BatchNorm2d(hidden_dim),
activation(inplace=True),
# pw-linear, Point-wise linear
nn.Conv2d(hidden_dim, out_features, 1, 1, 0, bias=False),
nn.BatchNorm2d(out_features),
)
def forward(self, x):
if self.is_residual:
return x + self.conv(x)
else:
return self.conv(x)
print(InvertedResidual(1280, 512, stride=2, expand_ratio=6) )
Linear bottlenecks
为什么称为瓶颈:
如下图所示,resnet的结构,其结构可以看为是一个花瓶,为此,说到瓶颈(Bottleneck),我们应最先想到ResNet网络结构,mobileNetV2同样使用了该结构。

其次就是Linear
下图是mobileNetV1和mobileNetV2结构之间的区别

论文中提到:高维加个非线性挺好,低维要是也加非线性就把特征破坏了,不如线性的好,所以1*1后 不加ReLU6 ,改换线性。
stride=1
(conv): Sequential(
(0): ConvBNReLU(
(0): Conv2d(24, 144, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(1): ConvBNReLU(
(0): Conv2d(144, 144, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), groups=144, bias=False)
(1): BatchNorm2d(144, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace=True)
)
(2): Conv2d(144, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(3): BatchNorm2d(24, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
stride=2
InvertedResidual(
(conv): Sequential(
(0): Conv2d(1280, 7680, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(7680, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU6(inplace)
(3): Conv2d(7680, 7680, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), groups=7680, bias=False)
(4): BatchNorm2d(7680, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): ReLU6(inplace)
(6): Conv2d(7680, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(7): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
注意一点:MobileNetv2中stride=1 和 stride=2 走的流程是不同的
stride=1
- point-wise升维
- depth-wise提取特征
- 通过Linear的point-wise降维
- input与结果 相加(残差结构)
区别于stride=2
- input与output的大小不同,所以没有添加shortcut结构
思考:mobileNetV2中先利用point-wise进行升维的话会提高许多计算量,是否还支持:深度可分离卷积和轻量化模型?
- v2比v1由于多了一层,那参数量确实就变大了,而实际上在v2设计中会把通道变小。 v2通道数不会升维到v1的那么大。
V m o b i l e N e t V 1 < V m o b i l e N e t V 2 V_{mobileNetV1} < V_{mobileNetV2} VmobileNetV1<VmobileNetV2
MobileNetv3
前面已经说过:
- MobileNetV1 模型引入的深度可分离卷积(depthwise separable convolutions);
- MobileNetV2 模型引入的具有线性瓶颈的倒残差结构(the inverted residual with linear bottleneck);
那么MobileNetv3又是什么?
论文链接:https://arxiv.org/abs/1905.02244
MobileNetv3是Google基于MobileNetv2之后的又一个力作,从精度和时间上均有所提高:
MobileNetv3提供了两个版本:分别是mobileNetV3 Large 和 MobileNetV3 Small 分别对应对计算和存储要求高和低的版本。
论文中也提到:

- mobilenet-v3 small在imagenet数据集分类任务上,较mobilenet-v2,精度提高了大约3.2%,时间却减少了15%
- mobilenet-v3 large在imagenet数据集分类任务上,较mobilenet-v2,精度提高了大约4.6%,时间减少了5%
- mobilenet-v3 large 与v2相比,在COCO数据集上达到相同的精度,速度快了25%
MobileNetV3做了哪些修改呢?
- 引入了SE结构
- 修改尾部结构
- 修改channel的数量
- 非线性变换的改变
引入了SE结构
SE是什么,全称: S q u e e z e − a n d − E x c i t e Squeeze-and-Excite Squeeze−and−Excite 其对应的论文是:《Squeeze-and-Excitation Networks》
SE是一个子模块,可以嵌到其他的模型中

Sequeeze-and-Excitation的层次结构可以分为两个部分:Sequeeze部分和Excitation部分
Sequeeze部分其实指的是:AdaptiveAvgPool2d
Excitation部分指的是:
- Linear
- ReLU
- Linear
- Sigmoid
为此我们也就清楚了SE网络的结构
- AdaptiveAvgPool2d
- Linear
- ReLU
- Linear
- Sigmoid

可以用一句话总结SE网络的特性:特征少的抑制它,特征多的就多多关注它。
常见的几种添加注意力(attention)机制:https://www.jianshu.com/p/fcd8991143c8

修改尾部网络结构
在mobilenetv2中,在avg pooling之前,存在一个1x1的卷积层,目的是提高特征图的维度,更有利于结构的预测,但是这其实带来了一定的计算量了,为此作者首先利用avg pooling将特征图大小由7x7降到了1x1,这样就减少了7x7=49倍的计算量。
并且为了进一步的降低计算量,Google团队直接去掉了前面纺锤型卷积的3x3以及1x1卷积,就变成了如下图第二行所示的结构,Google团队将其中的3x3以及1x1去掉后,精度并没有得到损失。
这里降低了大约15ms的速度。

修改channel数量
修改头部卷积核channel数量,mobilenet v2中使用的是32 x 3 x 3,作者发现,其实32可以再降低一点,所以这里作者改成了16,在保证了精度的前提下,降低了3ms的速度。
mobilenet v2以及mobilenet v3的结构对比:


非线性变换的改变
为了提高速度,Google团队提出了一种新的激活函数swish x 能有效改进网络精度:
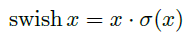
但是sigmoid的计算耗时较长,特别是在移动端,这些耗时就会比较明显
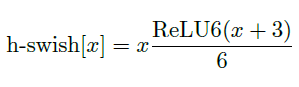
所以作者使用 R e L U 6 ( x + 3 ) 6 \frac{ReLU6(x+3)}{6} 6ReLU6(x+3)来近似替代sigmoid:
如下两张图展示的是使用h-swish对于时间以及精度的影响,可以发现,使用h-swish@16会导致精度略有提高0.2%,同时增加了近20%的延迟。

下图是将mobilenet v3应用于SSD-Lite在COCO测试集的精度结果
观察可以发现,在V3上面,mAP没有特别大的提升但是延迟确实降低了一些的

