红外图像和灰度图像、彩色图像概念
红外图象:是获取物体红外光的强度,而成的图象
灰度图象:是获取物体可见光的强度
彩色图像:每个像素由R、G、B分量构成的图像
红外图像和灰度图像的数据格式是一样的,都是单通道图象,而彩色的是3通道图象。
红外图像和灰度图像的区分
红外图像和灰度图像本身就不是在同一分类标准下得到的概念。
红外图像是红外成像设备采集目标在红外波段的辐射形成的影像,这个图像可以是灰度图像,也可以彩色图像。
同样的道理,可见光图像可以是灰度图像,也可以彩色图像。
灰度图像是相对彩色图像而言的。灰度图像没有颜色,灰度值由0变化至255时,图像由黑变白。
(原文链接:https://blog.csdn.net/qq_37405118/article/details/106782076)
红外彩色图像: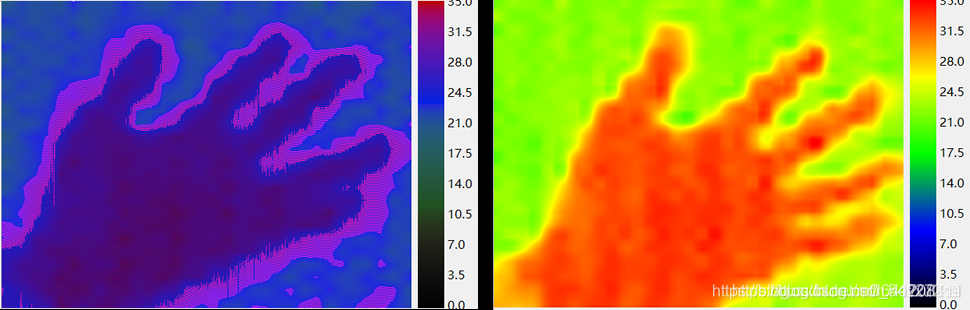
红外灰度图像
红外探测的原理
原文链接:https://zhuanlan.zhihu.com/p/67719009
红外热成像能否穿透墙壁
原文链接:https://www.zhihu.com/question/264497610/answer/282536148
红外热像仪具有不受低照度、太阳强光的干扰,可穿透烟雾、雾霾等特点。但厚衣服无法穿透,完全不透光的物体也是无法穿透观测的。因此,天气恶劣时,行人打黑伞,穿厚衣服,那么红外图像的行人图像就会较难识别,比较模糊。有的也会因为树林的遮挡而不能判断是否是行人。
————————————————
版权声明:本文为CSDN博主「borrrrrring」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/m0_54227219/article/details/116195698
红外图像成像特点
由于红外图像是通过“测量”物体向外辐射的热量而获得的,故与可将光图像相比:
分辨率差
对比度低
信噪比低
视觉效果模糊
灰度分布与目标反射特征无线性关系
局部不变特征
目前绝大多数景物匹配算法提取的都是全局不变特征,它能很好解决同一目标的一致性判决问题,但很难消除图像的成像畸变。当图像之间的成像畸变很复杂时,利用全局信息进行匹配非常困难,特别是存在局部遮挡时,全图特征会随之变化。
基于以上特点,红外图像的匹配识别与跟踪一般都是基于特征的方法,一般都是采用局部不变特征来对红外图像进行处理识别。
局部特征提取,即,将图像整体分割成若干个组成部分,对每一部分提取全局特征。此处的分割并不是我们直观认为的分割,理想情况下,人们总希望局部特征对应客观世界的物体的一部分,但是这是不现实的,往往需要借助图像处理技术对高层场景进行理解。
局部稳定特征有:
角点特征
边缘特征
直线特征
纹理特征
基于以上特征构建的特征
特征提取步骤:
局部不变特征检测:检测特征的位置————检测子算法
局部不变特征描述:定量化数据描述方法——描述子算法
不变特征检测算法
角点检测算子
Harris
SUSAN
CSS
FAST(features from accelerated segment test) 等
斑点检测算子
DoG(高斯差分算子)
Multi-Scale Harris
SIFT
SURF等
区域检测子
Salient Region
EBR
IBR
MSER
Hessian-Affine
Harrise-Affine等
特征描述算子
特征描述算子是一种图像局部结构特征的定量化数据描述,它应该能充分反应特征点附近图像的形状和纹理结构特性。
一个理想的特征描述子应该具有以下特征:
鲁棒性:仿射变换/密度变换/噪声干扰下具有稳定工作的能力
独特性:局部结构发生变化时,具有捕获和反应这一变化的能力
匹配速度:相似性比较时的运算速度,特征空间维数越高,速度越差
描述子分类:
基于图像梯度分布(SIFT)
基于空间频率
基于微分和不变矩
————————————————
版权声明:本文为CSDN博主「Ian ma」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/horseinch/article/details/51819448