继上篇介绍AUTOSAR基础篇之Event(上)之后,本文将重点介绍Event的优先级,Event Displacement、Event Dependency Node、Event Storage Condition四个方面给大家介绍。
- Event优先级
Event优先级的提出是为了解决当ECU内部存储的Event入口已满的前提下,如何决定当前发生的Event怎样存储的问题,到底是舍弃当前新产生的Event还是剔除已存入却已经恢复或者非Active状态的Event来保证最新Active状态的Event存入NVM,这对于故障分析处理也是十分必要的。一般如下所示,Event优先级存在以下几个特点,如下图1所示:

图1 Event优先级的基本特征
有一点需要说明的是针对多个event Map至同一DTC的场合,对于客户可见的同一DTC下所map的所有event一般都应赋予同一优先级,而对于内部event的处理,可以采用不同的优先级,即不需要考虑是否Map同一DTC。这样做的好处在于对客户而言,可以给到统一的故障信息,对供应商而言,可以保留最为重要的event信息,一举两得!同时,Event的优先级也会在下面Event Displacment的过程中发挥至关重要的作用。
2. Event Displacement
一般而言,对于ECU内部存储event的数量是一定的,通常也称为event memory entry,当前该大小取决于ECU本身存储空间,但一般不少于10个event memory entry。而event displacement仅发生在当event memory entry已满的情形下,应按照一定的策略来决定如何对新增的event进行存储。根据AUTOSAR标准,其提供了一套较为行之有效的策略供参考,且这一套机制在DEM模块实现,该模块按照这下列三大原则来实现Event displacement:
· Event Priority(这是最重要的评判原则,数字越小存储优先级越高);
· Event Active或者Passive状态(Active存储优先级高于Passive优先级);
· Event Occurence time(最近发生的存储优先级高于较早发生);
为了更好的表达这三者在Event displacement中如何发生作用,以下图2中所示,该图以非排放相关系统故障监控为例,清晰表达了这三者之间如何协同作用来完成event的存储。
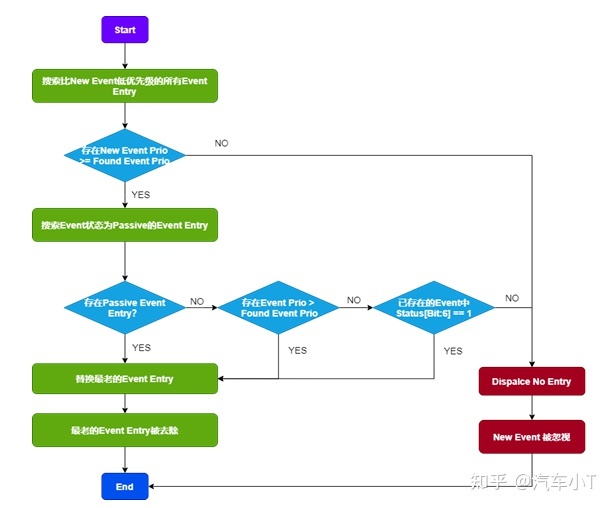
图2 Event Displacement Strategy
3. Event Dependency Node
在谈Event Dependency之前,我们需要引入一个概念:MonitoringComponent, 该组件代表整个ECU系统可被划分为几个大的组件来统一监控,不至于对所有Event离散型监控,因为Event也是存在类别或者依赖关系,Event之间的这些关系同样的可以映射到MonitoringComponent中。比如当某个Event发生时,有些Event就会必定发生,那么这些Event是不是应当过滤掉呢;当某组件模块发生模块,那么其依赖模块是不是也会存在问题呢?因此该组件模式就会在此发挥十分重要的作用,如下图3所示,就表现了ECU硬件组件以及COM组件模块之间的依赖关系。
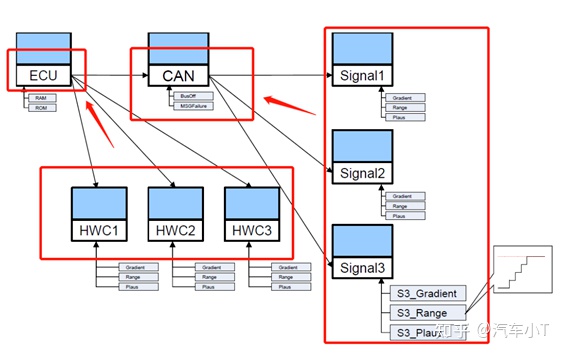
图3 Event Dependencies
通过上图我们能简要知道对于存在依赖关系的event可通过上述Dependency Gragh 来体现。那么,具体到软件内部,一般做法又是如何处理的呢?接下来我们来看下图4所示的示例来完整解释对于上述过程的一般性做法:
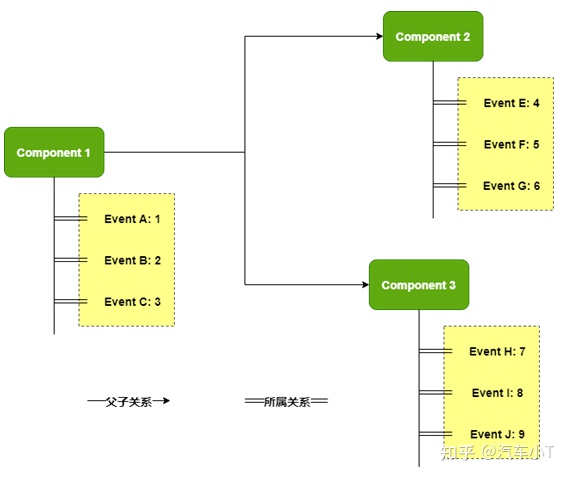
图4 Event Dependency Gragh
正如前面讲到,当某个Event发生时,其他Event也会相继发生,那么此时我们称前者为Causal Fault, 而后者则被称为Consecutive Fault。对于Causal Fault ECU会正常执行Event handling,但是对于Consecutive Fault则会直接Ignore掉。下面我们假定五种情形,来看看DemComponent如何发挥作用:
A. 若Event A, Event B同时发生或者A先于B发生时,Event A则被视为CausalFault,而Event B作为ConsecutiveFault直接忽略掉;
B. 若Event B已经发生时,Event E就会当做Consecutive Fault直接忽视掉,因为Component 1即为Failed状态,其子Component下的Event都会被视为Consecutive Fault忽视;
C. 若Event E发生时,Event H发生时,两者都会被视为Causal Fault完成正常的Event handling,因为两者并没有存在父子关系,DEM模块会平等对待此类型的Component;
D. 若Compopnent 2模块忽视自身优先级且Component 1 处于Not Fail状态时,那么该模块2下所有的event都是平等关系,按照正常Causal Fault处理;若此时Component 1为Fail状态时,那么Component2下的所有Event均会被视为Consecutive Fault来处理;
E. 若Component 3被设置成Not Available,那么该模块也会被视为不存在整个ECU系统中,而其下的所有Event均会被设置为不可见状态;
4. Event Storage Condition
当一个Event经过上述的Event handling过程之后,其最终能否为其分配Event Memory Entry不仅取决于Event memory是否已满,在此之前还有一关要过,那就是Storage Condition。一个Event 可以存在0个或者多个StorageCondition,Storage Condition条件的设定可由DEM提供API函数Dem_SetStorageCondition来实现,每个Storage Condition可根据客户需求自由实现。如下图5所示,就体现了不同Event是否满足Storage Condition下的DEM处理过程。
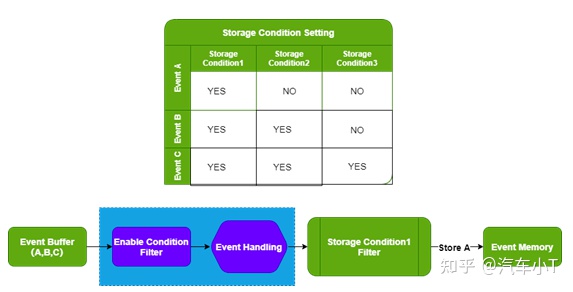
图5 Event Storage Condition Processing
如上图所示,EventA的StorageCondition为1,EventB的StorageCondition为1,2,Event C的Storage Condition为1,2,3。上述Event A、B、C在经过Storage Condition Filter之前都会进行前置处理即EnableCondition Filter与Event handling过程,假定这三个event都满足各自的Enable Condition,但当前仅有Storage Condition1成立,那么仅存在Event A被存入Event Memory,Event B与C则会在这一环节被过滤,无法存储至event Memory中。不过Event B、C虽不满足上述的相应的StorageCondition, 但需要特别注意的是event B、C的Status的Bit 3(Confirmation bit)位会不为1,其余Bit还是执行正常的event handling,以便来表征该类Event 未被最终存储至Event Memory中。
除了上述列出来的常见的几大属性以外,Event还有很多属性,如Event Retention、Event Status,Aging等,大家如果感兴趣,可以多多参考AUTOSAR的相关文档来进行学习。一天的社区图书馆学习就结束了,后续会针对这些模块我也会做进一步的综合分享,也十分欢迎关注转发、点赞收藏,你的鼓励将是我分享的强大动力!感谢你阅读至此,希望能给你些许帮助!