文章目录
1.MIPI来源
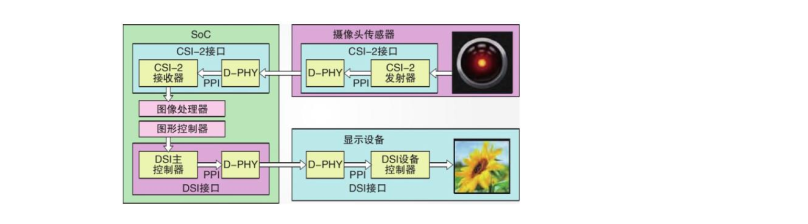
MIPI是2003年由ARM,TI等公司成立的联盟,目的是把手机内部的各种接口(摄像头CSI,显示屏DSI,射频/基带接口DigRF等)标准化,从而减少手机设计的复杂程度以及增加设计的灵活性,目前比较成熟的接口应用有DSI(显示接口),和CSI(摄像头接口),都具有比较复杂的协议结构,下图表示某一个SOC可以作为一个CSI的接收器,同时也可以作为一个DSI的输出器,其物理层使用到了D-PHY,目前新的物理层C-PHY也逐渐被采用,我们常说的Camera I2C接口在MIPI中有专门的一个CCI(Camera Control Interface)来对应
2.MIPI联盟的显示规范标准
- DCS(Display Command Set)
用于显示模块命令模式下的标准化命令集; - DBI, DPI (Display Bus Interface, Display Pixel Interface)
DBI:与具有显示控制器和帧缓冲器的显示模块的并行接口。
DPI:与显示模块的并行接口,不带显示控制器或帧缓冲器。 - DSI, CSI (Display Serial Interface, Camera Serial Interface)
DSI:主机处理器与显示模块之间的高速串行接口;
CSI:主机处理器与摄像头模块之间的高速串行接口; - D-PHY
为DSI和CSI提供物理层通路定义;
2.1 DSI/CSI分层
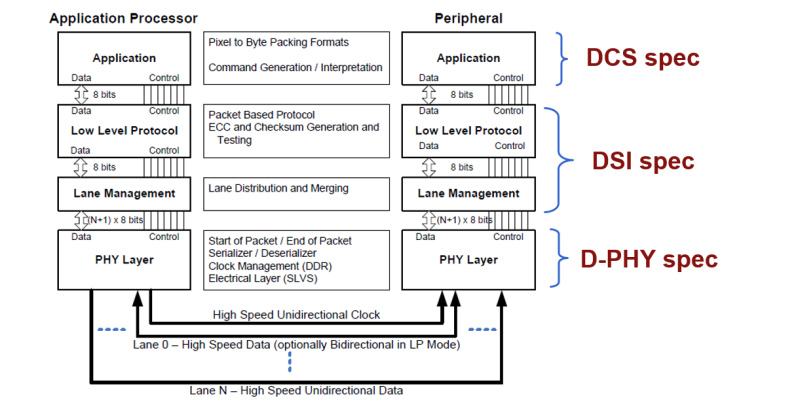
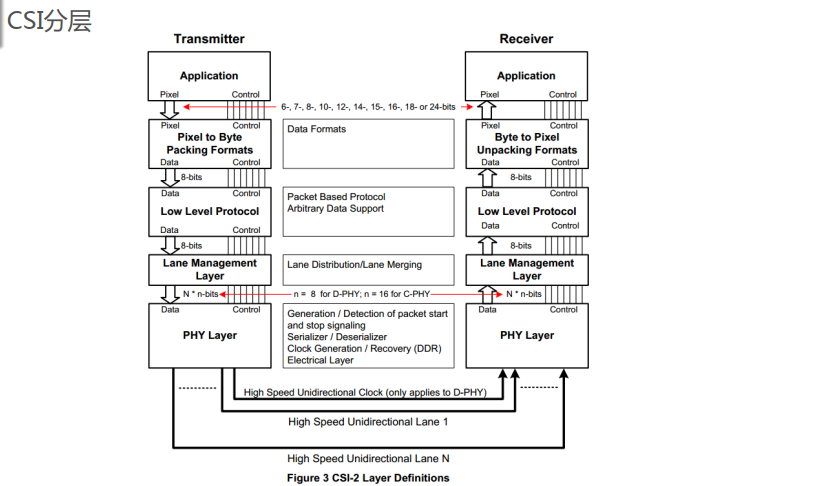
CSI和DSI的分层的差不多的
- DCS spec: 处理原始图像数据的各种算法模块
- DSI/CSI spec:进行数据分割与重组,再根据数据类型产生包头,根据数据内容产生构成包尾的校验序列,之后将包头、数据本身、包尾组合起来,合理分配数据给每一个通道,之后数据经过数模转换进入物理层(D-PHY)传输,接收端在接收到物理层的数据之后,按照之前的逆序解包出原始的数据
- D-PHY spec:生成最后的MIPI波形
3.MIPI D-PHY
3.1 D-PHY配置
D-PHY需要一条时钟通道和一条或者多条数据通道,所有数据通道需要支持高速数据传输和正向的Escape模式,数据通道分为数据通道的两种类型为双向和单向,其中双向为半双向
注:双向数据通道应包含以下功能: (1) HS模式下数据的反向传输;(2)LP模式下反向的Escape模式;
配置可选项:
1.一条或多条数据通道;
2.每个通道上双向或单向的数据通道;
3.每个通道支持的反向通信种类;
4.每个通道的每个方向上Escape模式的功能;
5.数据编码方式; raw或者8b9b编码;
3.2 D-PHY的工作模式
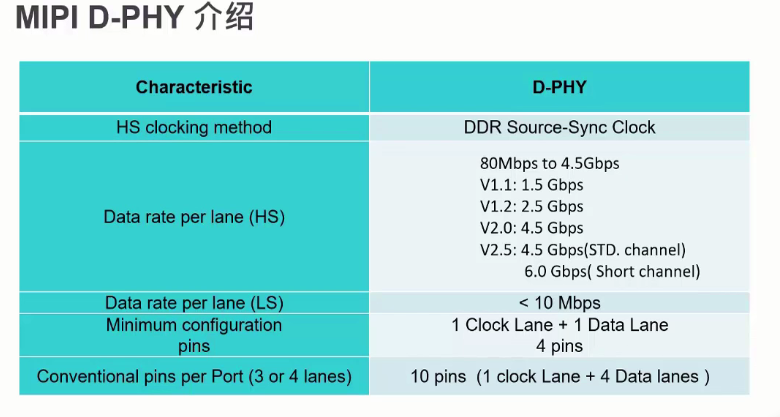
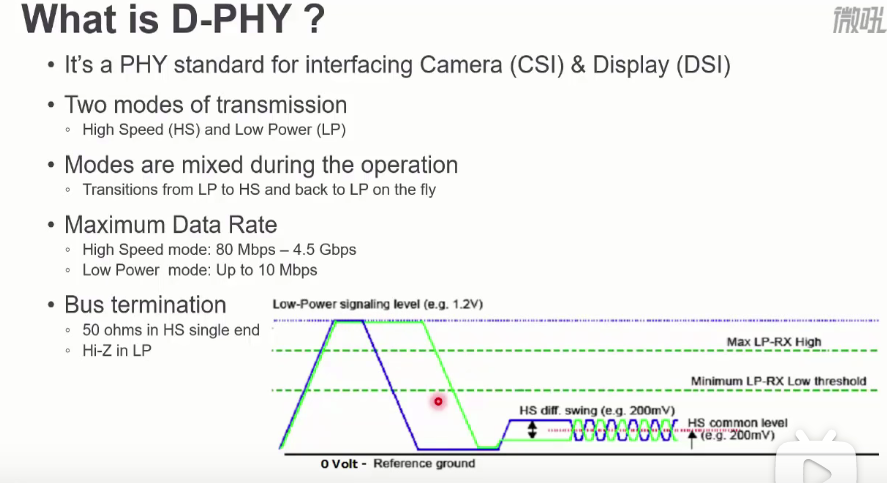
MIPI D-PHY的时钟工作方式类似于DDR的时钟工作方式,一个clock周期内,上升沿和下降沿都采集数据,有High speed (HS)和low power(LP)两种工作方式,HS支持的最大数据传输速率为80Mbps-4.5Gbps,LP模式最大速率到达10Mbps,这两种工作模式会混合在一起工作,有高数据量数据传输时会从LP模式转换为HS模式,当数据传输完毕会从HS模式转换到LP模式,减少功耗,一般使用1对clock lane搭配4对data lane,这里需要10个pin脚
-
HS高速传输模式:用于传输突发数据,同步传输,信号为差分信号,电平范围为100mV-300mV,传输速度范围为80M-1Gbps,在该模式下传输时,当差分线上正端收到300mV信号,负端收到100mV信号时,此时接收端识别为1,反之为0
-
LP低功耗模式:用于传输控制指令,异步传输,信号为单端信号,电平范围为0-1.2V,没有用时钟线,时钟是通过两个数据线异或而来的速度小于等于10Mbps,在该模式下传输时,当正端接收到1.2V,负端接收到0V时接收端识别为1,反之识别为0
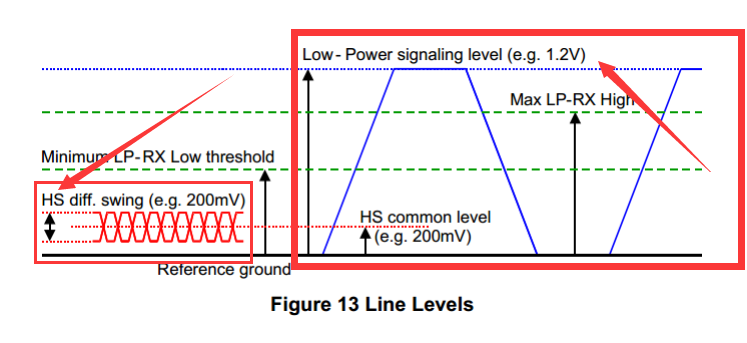
在HS模式下data与clock lane单端接50ohms电阻,在LP模式下为高阻态,当没有数据时D+,D-都工作在LP的高电平状态,为单端信号,当需要高数据传输时,会经过一定的时序进行的HS模式,HS模式D+,D-是一对差分信号
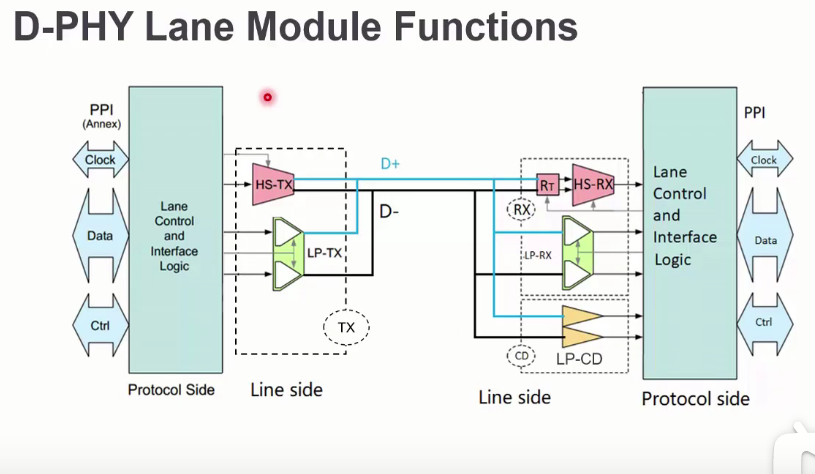
具体到每一个lane上的实现为,左边为master端,需要HS-TX,LP-TX,这两个模组连接到同一条数据线上对应到slave端的HS-RX和LP-RX,slave端需要一个端接电阻,以及LP-CD,用来检查LP的状态,
4.D-PHY两种模式的实现示意图
4.1 HS模式
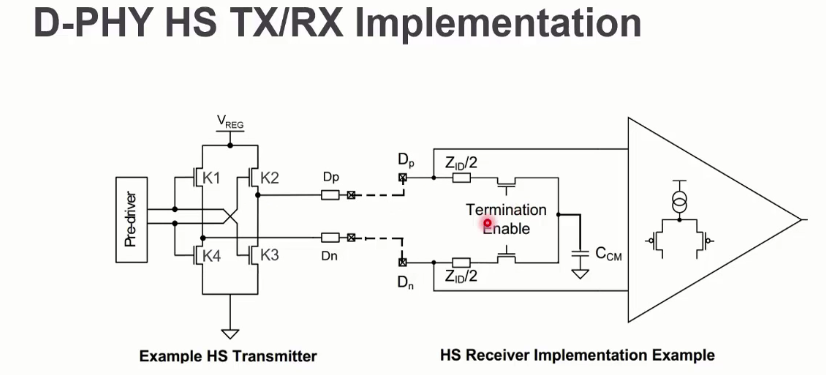
下图中左侧为发送数据端,也就是master端,有两个类似于推挽的结构,右侧为差分信号接收端,由两个端接电阻与端接使能信号组成,工作模式为:以差分的D+信号为例,当K2和K4打开之后,电压经过线连接到了端接电阻,当端接使能打开之后,上下两个端接电阻形成回路,这就形成了差分信号正的变化,当K2,K4关闭之后,形成差分信号负的变化,D-由K1和K3控制,是一个相反过程
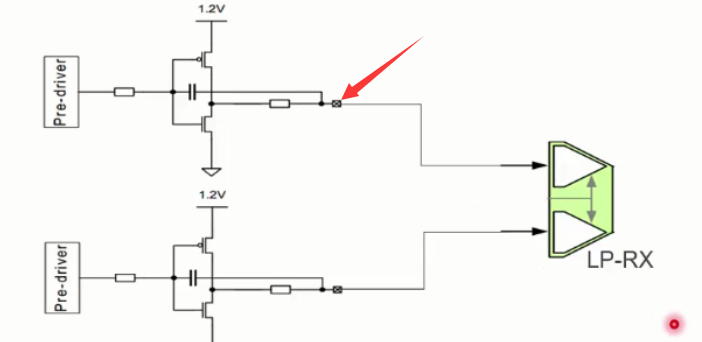
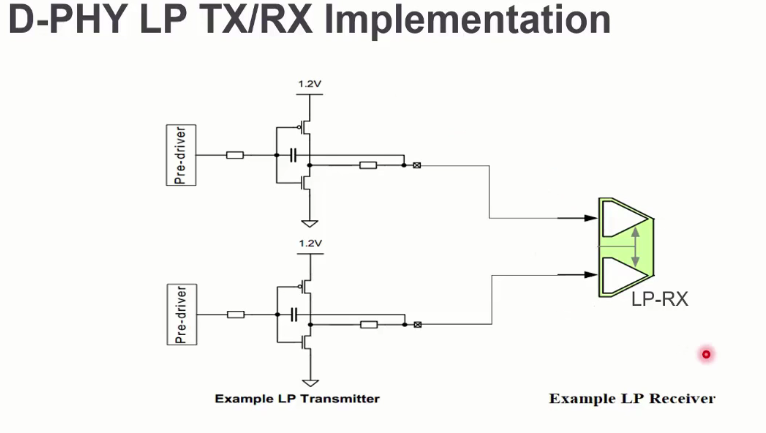
4.2 LP模式
与HS模式不同,RX这端不需要端接,是无穷大的,只需要控制TX这端做出相应的变化即可,当需要输出LP的high,即输出1.2V,只需要控制上面的开关打开,则D+为1.2V,当需要控制输出低电平时,则需要将下面的开关打开,从而实现端点电压为低的目的,从而实现电压的高低变化,由于在LP模式下D+和D-为单端信号,所以D+和D-单独控制即可
5.D-PHY三种工作模式的数据传递示意图
5.1 时钟连续模式
时钟连续模式也叫做HS-TX或者burst(突发)模式,从图中可以看出,时钟一直存在,处于差分状态,当没有数据传输时,data lane处于lp11模式,D+,D-都处于高电平状态,当有数据传输时,通过一定的时序进入HS模式,从LP01进入到LP00状态,然后经过THS-ZERO状态,当经过数据传输完毕之后,同样按照一定的时序退出

进入退出命令为:进入: LP-11, LP-01, LP-00, SoT(00011101);退出: EoT, LP11
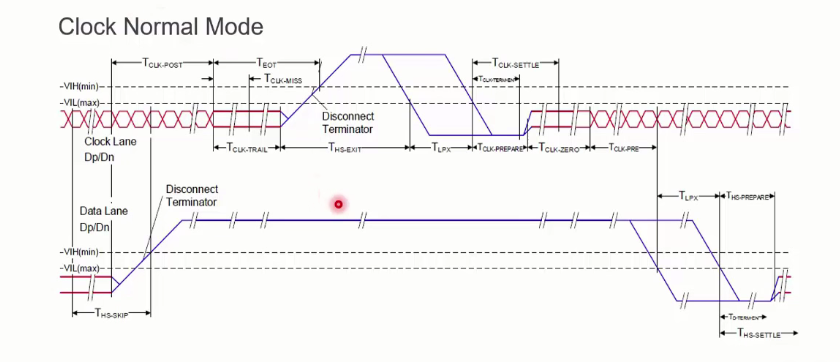
5.2 时钟普通模式
在时钟的nomal模式下,没有数据时,clock lane也处于高组态,使得clock lane也进入低功耗模式,clock lane要早于data lane进入HS模式,当数据传输完毕之后,clock lane晚于data lane 进入LP模式,所以此时clock lane不是连续的
5.3 Escape mode
在LP模式下也可以传递数据,这个工作状态叫做Escape mode,进入时序为在LP模式下按照下面红框的时序进入escape mode,再进行相应的数据传递,他的时钟是通过D+和D-经过异或得到的,主要用于低速信号的传递,比如芯片的初始化工作
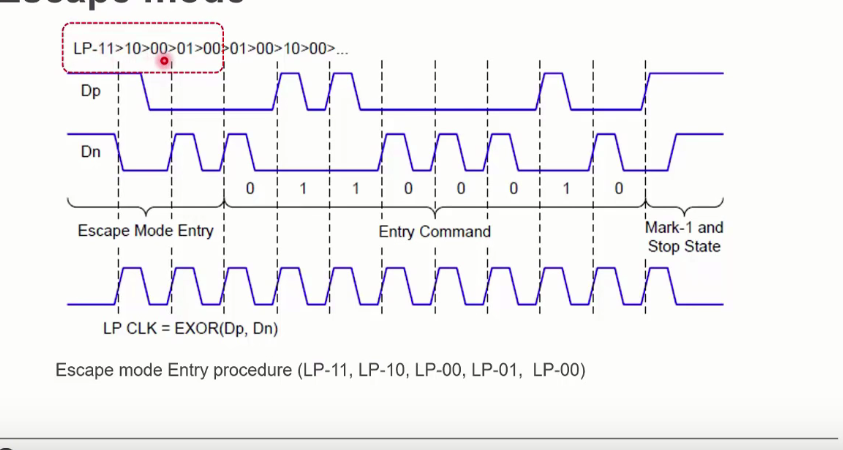
进入: LP-11, LP-10, LP-00, LP-01, LP-00;退出: LP10, LP11
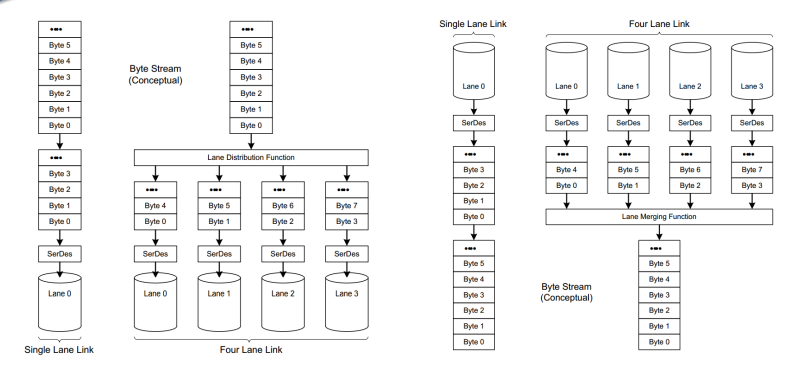
6.MiPi多通道分配及合并
对于D-PHY来说,一个clock data最多可以支持4对data lane,下面为不同lane时数据在D-PHY上的传输,发送端通过串行转并行将数据传输到接收端,接收端通过逆序将数据解析
7.其他
MIPI是差分信号,具有抗干扰的特性,抗干扰公式为:((D+) + noise)-((D-) - noise) =(D+) - (D-)
更多资料可看MIPI的官方手册
笔记来源:
https://page.om.qq.com/page/OViWkvAD9KSsWFU74vkuQAmQ0
https://www.bilibili.com/video/BV1Tv411j7Q6