硬件平台: NVIDIA Jetson TX2
ARM64架构
系统平台: Ubuntu18.04 LTS
NVIDIA Jetson TX2 ARM64安装软件教程
一.换源
在安装软件之前先换源
TX2的软件源为国外服务器,网速会很慢,需要换国内的ARM源。
将文件改为国内源(注意修改之前先将原文件备份),还有一点要注意,换源需要换ARM的源,不要换成了pc平台的软件源。
这里推荐两个国内源,将原来文件里面的内容全部替换成下面两个源之一就可以:
清华源:
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial main universe restricted
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial main universe restricted
科大源:
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main universe restricted
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main universe restricted
替换之后,执行
sudo apt-get update
这样源就换好了
换源出处:https://blog.csdn.net/QLULIBIN/article/details/80271096
二.各种软件的安装
1.安装g++
打开终端,输入:
sudo apt-get install g++
2. 安装QT
终端输入:(自动安装最新版本)
sudo apt-get update
sudo apt-get install qt5-default qtcreator
3. Opencv4.1.0安装与配置
1.opencv下载
其他版本可以**版本选择,找到需要下载的版本按Sources进行下载
2.配置前先下载cmake
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get update
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev
如果出现“E: 无法定位软件包 libjasper-dev”报错,是因为缺少依赖,终端继续输入
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt install libjasper1 libjasper-dev
安装依赖后再一次输入
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev
QT+Opencv配置:(将opencv压缩包解压,在opencv文件夹中打开终端)
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
sudo make
sudo make install
sudo gedit /etc/ld.so.conf.d/opencv.conf
加入 /usr/local/lib
sudo ldconfig
接着配置环境变量:
sudo gedit /etc/bash.bashrc
在最底端写入:
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
终端输入:
sudo ldconfig
sudo cp /usr/local/include/opencv4/opencv2 /usr/local/include -r
上面一行,可自行顺着路径查看本机文件夹内容,这个操作是为了方便配置好后,QT的pro文件内容更简便
配置好后,打开QT5进行测试:
.pro文件:
TEMPLATE = app
CONFIG += console c++11
CONFIG -= app_bundle
CONFIG -= qt
SOURCES += main.cpp
INCLUDEPATH += /usr/local/include/opencv4
LIBS += /usr/local/lib/libopencv_* \
测试能否调用摄像头:
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
using namespace std;
using namespace cv;
int main()
{
VideoCapture capture (0);
Mat src;
while(1)
{
capture >> src;
imshow("capture",src);
char(key)=(char)waitKey(1);
if(key==27)
break;
}
return 0;
}
详情请看佳佳鸽的博客:Ubuntu18.04 QT与Opencv4.1.0 安装与配置
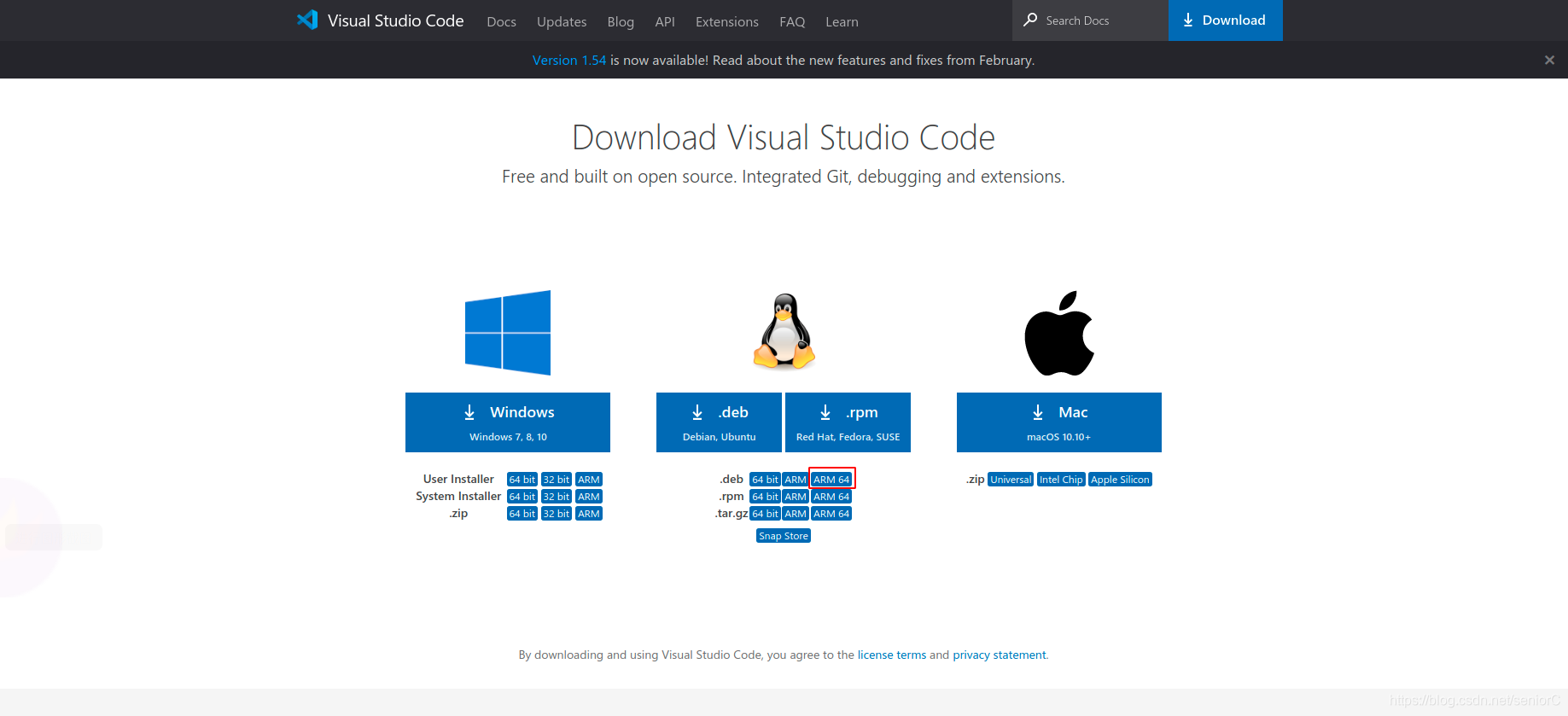
4. 安装vscode
- 先去vscode官网的下载页面下载ARM64版本的.deb安装包,如下图所示
2. 然后在vscode安装包路径下打开终端,输入:
sudo dpkg -i 安装包名
3.安装完成
5.配置vscode
配置过程请参考以下文章
Ubuntu18.04 vscode(c++)配置opencv4.1.0
6. 安装ROS
详情信息请参考以下文章:
7>待续…