1、mipi是什么?
mipi当然是米皮啦!西安的小吃,哇哈哈哈。削微开个玩笑

MIPI 联盟成立于2003年,是由ARM, Nokia, ST ,TI等公司成立的一个非营利组织。即移动产业处理器接口(Mobile Industry Processor Interface 简称MIPI)联盟。开发移动和受移动影响的设备的公司提供服务。该组织制定了硬件和软件接口规范,制造商可以使用它们来互连设备中的组件。目的是把手机内部的接口如摄像头、显示屏接口、射频/基带接口等标准化,从而减少手机设计的复杂程度和增加设计灵活性。
MIPI(移动产业处理器接口,Mobile Industry Processor Interface)是MIPI联盟发起的为移动应用处理器制定的开放标准和一个规范。MIPI联盟下面有不同的WorkGroup,分别定义了一系列的手机内部接口标准,比如摄像头接口CSI、显示接口DSI、射频接口DigRF、麦克风/喇叭接口SLIMbus等。下图是按照 MIPI的规划下一代智能手机的内部架构。


摄像机串行接口2规范定义了外围设备(摄像机)和主机处理器(基带、应用引擎)之间的接口
mipi官网 :https://www.mipi.org/
2、名词解释
Lane:用于高速串行时钟或数据传输的单向、点对点、2或3线接口;lane的数量由使用中的PHY规范的决定(即 分别为D-PHY或C-PHY)。
使用D-PHY物理层的CSI-2相机接口由一个时钟线和一个或多个数据线组成。
使用C-PHY物理层的CSI-2相机接口由一个或多个通道组成,每个通道同时传输时钟和数据信息
Message:在CCI (I2C)或CCI (I3C SDR)中,消息以启动或重复启动条件开始,后面跟着目标备设备的地址,R/W位,其他数据,并以停止或重复启动条件结束。在CCI (I3C SDR)的情况下,可以在开头添加一个启动或重复启动条件,后跟7’h7e。
在CCI (I3C DDR)中,消息以I3C HDR ENTHDR0 CCC或I3C HDR重启模式开始,然后是HDR-DDR命令、HDR-DDR数据,以I3C HDR退出模式或I3C HDR重启模式结束。
Operate:操作由一个或多个消息组成,以便读或写。
Packet:以指定方式组织的一组字节,用于跨接口传输数据。 所有数据包都有最小指定的组件集。 字节是产生数据包的基本数据单位。
有效负载:仅应用程序数据-所有同步、头、ECC和校验和以及其他与协议相关的信息都被删除。 这是应用程序处理器和外围设备之间传输的“核心。
睡眠模式:睡眠模式(SLM)是一种仅泄漏电平的功耗模式。
传输:高速串行数据主动遍历总线的时间。 一个传输在开始和结束时分别以SOT(传输的开始)和EOT(传输的结束)为界。
虚拟通道:支持多达32个外围设备的多个独立数据流。 每个外围设备的数据流可能是虚拟通道。 这些数据流可以交错并作为顺序数据包发送,每个数据包专用于特定的外围设备
3、CSI-2概览
3.1 C-PHY和D-PHY概览
D-PHY:一个2线时钟线和一个或多个2线数据线的单向差分接口。发送方接受方之间的连接用D-PHY模式CSI-2,发送方是camera模组,接受方是CPU中某部分

C-PHY:第二个高速数据传输接口选项 ,由一个或多个单向3线串行数据通道组成,每个通道都有自己的嵌入式时钟。CSI发送器和接收器连接。

3.2 CSI-2 分层定义

PHY层 : 指定传输介质(电导体),输入/输出电路和从串行比特流捕获“1”和“0”的时钟机制。这一部分记录了传输介质的特性、信令和D-PHY物理层选项的电气参数、时钟和数据通道之间的定时关系。
指定了发送起始(SoT)和发送结束(EoT)的信令机制,以及可以在发送和接收物理之间传递的其他“带外”信息。位级和字节级同步机制是PHY的一部分
协议层。协议层由几个层组成,每个层都有不同的职责。CSI-2协议使用主机处理器上的单一接口支持多个数据流。协议层指定如何标记和交叉多个数据流,以便每个数据流可以正确地重构。
•像素/字节打包/解包层:CSI-2规范支持不同像素格式的图像应用程序。在传送器中,这一层将应用层的像素打包成字节,然后再将数据发送到低层协议层。在接收端,这一层在将数据发送到应用层之前将底层协议层的字节解包为像素。每像素8 位数据被这一层不变地传送。
•低级别协议:低级别协议(LLP)包括为串行数据在SoT(传输开始)和EoT(传输结束)事件之间传输以及将数据传递到下一层建立位174级和字节级同步的方法。LLP的最小数据粒度是一个字节。LLP还包括字节内位值解释的赋值,即“尾数”赋值。
•Line管理:为提高性能,CSI-2是Lane-scalable的。数据通道的数量不受的限制,可以根据应用程序的带宽要求来选择。接口的传输端将(“分发器”功能)字节从传出的数据流分发到一个或多个通道。在接收端,接口从通道收集字节并合并 (“合并”功能)到一个重新组合的数据流中,恢复原始的流序列。对于C-PHY物理层选项,这一层专门分配或收集字节对(即16位)到或从数据通道
应用程序层:这一层描述了包含在数据流中的数据的更高层次的编码和解释
3.3 控制端CCI
控制端有2根双向线连接,兼容I2C,可以支持400KHz的数据传输。其读写都遵循I2C协议。包括单数据读写以及连续数据读写。最大支持16bit寄存器寻址,能够支持8bit,16bit,32bit,64bit数据宽度。寄存器数据发送顺序是由高到低。
CCI可以选择性地支持高达1Mbps (Fm+)、12.5Mbps (SDR)或25Mbps (DDR)。


4、MIPI CSI2工作模式
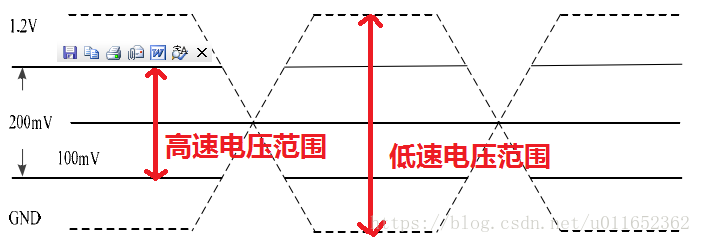
D-PHY有两种传输模式:
①HS 高速传输模式,用于传输突发数据,同步传输,信号为差分信号,电平范围为100mv-300mv,传输速度范围是80-1000Mbps。
在该模式下传输时,当差分线正端收到1.2V 信号,负端收到0V信号时,这时接收端识别为1。反之为0。
②LP 低功耗模式,用于传输控制指令,异步传输,信号线为单端,电平范围是0-1.2v,没有用时钟线,时钟是通过两个数据线异或而来的,速度只有10Mbps。
在该模式下传输时,当正端接收到300m V,负端接收到100m V 时接收端识别为1.反之则识别为0。
进入时序:LP11->LP10->LP00
退出时序:LP00->LP10->LP11
5、Low Level层
低级别协议(LLP)是一个面向字节的、基于包的协议,它支持使用短包和长包格式传输任意数据。

LLP包有两种:长包和短包。每个包的传输以ST(start of transmission)开始,ET(end of transmission)结束,中间间隙是LPS(Low Power State低功耗状态)
长报文
MIPI CSI2的长包主要有包头、数据包和包尾三部分构成。而包头又可细分为:数据标识(data identifier)、数据包大小(word count)和错误校验码(ECC)构成


短报文
与长包相比,短包没有数据包和包尾。数据标识DI中的数据类型在0x00到0x0F之间。WC字段是短包的数据域,这个数据可由用户定义。ECC是校验码,能对1bit错误进行纠错,2bit错误进行检查

帧格式

6、驱动代码中mipi的配置
mipi_clk = mipi_data_rate * line_number / 10bit
.mipi_data_lp2hs_settle_dc = 85,
.mipi_pixel_rate = 460800000, //sensor实际输出数据速率
.sensor_interface_type = SENSOR_INTERFACE_TYPE_MIPI,
.mipi_sensor_type = MIPI_OPHY_NCSI2,
.mipi_settle_delay_mode = 1,
.mipi_lane_num = SENSOR_MIPI_4_LANE,enum ACDK_SENSOR_INTERFACE_TYPE_ENUM {
SENSOR_INTERFACE_TYPE_PARALLEL = 0,
SENSOR_INTERFACE_TYPE_MIPI,
SENSOR_INTERFACE_TYPE_SERIAL,/* add for ATV using serial interface */
SENSOR_INTERFACE_TYPE_MAX
};
typedef enum { //0:CSI2(2.5G), 1:NCSI2(1.5G)
CSI2_1_5G = MIPI_OPHY_NCSI2, /* 1.5G support */
CSI2_2_5G = MIPI_OPHY_CSI2, /* 2.5G support*/
CSI2_2_5G_CPHY = MIPI_CPHY, /* 2.5G support*/
}SENINF_CSI2_ENUM;
typedef enum {
SENSOR_MIPI_1_LANE = 0,
SENSOR_MIPI_2_LANE,
SENSOR_MIPI_3_LANE,
SENSOR_MIPI_4_LANE
} ACDK_SENSOR_MIPI_LANE_NUMBER_ENUM;有关mipi的知识和经验总结未完待续...
7、参考文档
MIPI CSI2学习(一):说一说MIPI CSI2_会飞的胖子的博客-CSDN博客
【转】mipi-csi-2解读 - 七月妈 - 博客园 (cnblogs.com)
剩下还有一些corlor space、数据格式以及存储格式的介绍在 《mipi_CSI-2协议规范资料,mipi_CSI-2_specification_v2-1-er01.pdf》