文章目录
- 论文地址:http://yhwu.me/publications/dysat_wsdm20.pdf
- 源码:DySAT
- 来源:WSDM, 2020
- 关键词:self-attention, representation learning, dynamic graphs,
1 前言
该论文解决的是动态图中的结点表征问题。论文提出了DySAT(Dynamic Self-Attention),以自注意力机制捕捉动态图的结构的动态性。DySAT分别从两个方面捕捉动态性:structural neighborhoods和temporal dynamics,并且使用多头注意力来捕捉多方面的动态性。
2 问题定义
论文中使用图序列来表示动态图。关于动态图的建模,在这里插一句。
2.1 dynamic graph
动态图通常由两种建模方式:图序列(graph snapshots)和基于带时间戳的事件的图(time stamped events,类似于流图)。本质上来看这两种建模方式是等价的,是可以互相转化的。但是不同的建模形式针对这不同的应用场景。snapshot形式的动态图,直观上强调的整体性,图中结点/边的变化是为了整体的图而服务的,这种情况下我们更多的考虑的是作为一个整体的图的应用场景,例如在场景识别中、对图进行分类的任务中。而timestamped形式的动态图,对整体的考虑可能会不是那么强,更强调的是图中结点/边以及这些变化对任务的影响。
作者采用的是snapshots形式的动态图 G = { G 1 , . . . , G T } \mathbb{G} = \{\mathcal{G}^1, ..., \mathcal{G}^T\} G={ G1,...,GT}。其中 T T T是时间步的数量, G t = ( V , E t ) \mathcal{G}^t = (\mathcal{V}, \mathcal{E}^t) Gt=(V,Et)。显然,该论文中动态图的结点是不变的,即不涉及结点的增加或删除。最终的目标就是学习图中每个结点在任意时间 t t t时的表征。
3 DySAT思路
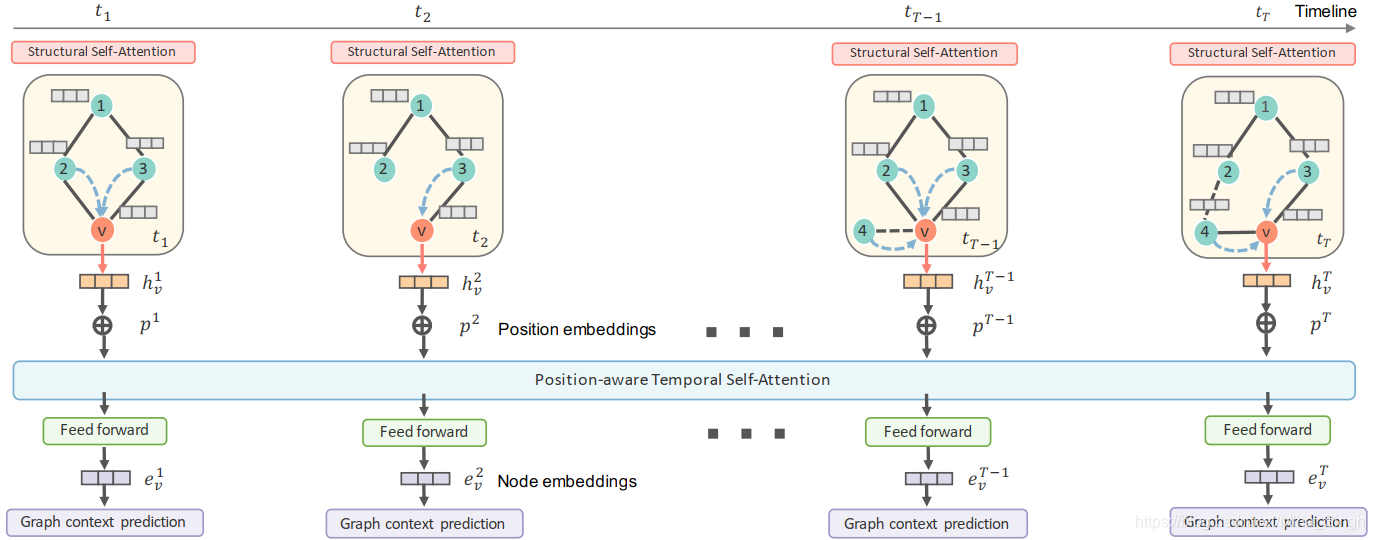
DySAT的整体框架如上图所示。DySAT主要分为两个部分:Structural Self-Attention和Temporal Self-Attention。
3.1 Structural Self-Attention
这一部分与GAT中的注意力机制类似,想当于一个邻居结点信息汇聚层。对于每一个snapshot graph,Structural Self-Attention利用当前时刻各个结点的表征计算注意力再进行加权求和,计算公式如下:
z v = σ ( ∑ u ∈ N v α u v W s x u ) , α u v = exp ( e u v ) ∑ w ∈ N v exp ( e w v ) e u v = σ ( A u v ⋅ a T [ W s x u ∥ W s x v ] ) ∀ ( u , v ) ∈ E \begin{array}{c} z_{v}=\sigma\left(\sum_{u \in \mathcal{N}_{v}} \alpha_{u v} W^{s} x_{u}\right), \alpha_{u v}=\frac{\exp \left(e_{u v}\right)}{\sum_{w \in \mathcal{N}_{v}} \exp \left(e_{w v}\right)} \\ e_{u v}=\sigma\left(A_{u v} \cdot \boldsymbol{a}^{T}\left[\boldsymbol{W}^{s} \boldsymbol{x}_{u} \| \boldsymbol{W}^{s} \boldsymbol{x}_{v}\right]\right) \forall(u, v) \in \mathcal{E} \end{array} zv=σ(∑u∈NvαuvWsxu),αuv=∑w∈Nvexp(ewv)exp(euv)euv=σ(Auv⋅aT[Wsxu∥Wsxv])∀(u,v)∈E
3.2 Temporal Self-Attention
这部分是为了捕捉动态图在时间上的变化模式。计算结点 v v v在 t t t时的表征时,将在 t t t之前的 v v v的表征作为temporal self-attention模块的输入,输出的是结点 v v v在各个事件点的表征(此时的表征考虑了动态性),计算公式如下:
Z v = β v ( X v W v ) , β v i j = exp ( e v i j ) ∑ k = 1 T exp ( e v i k ) e v i j = ( ( ( X v W q ) ( X v W k ) T ) i j F ′ + M i j ) \begin{array}{r} Z_{v}=\beta_{v}\left(X_{v} W_{v}\right), \quad \beta_{v}^{i j}=\frac{\exp \left(e_{v}^{i j}\right)}{\sum_{k=1}^{T} \exp \left(e_{v}^{i k}\right)} \\ e_{v}^{i j}=\left(\frac{\left(\left(X_{v} W_{q}\right)\left(X_{v} W_{k}\right)^{T}\right)_{i j}}{\sqrt{F^{\prime}}}+M_{i j}\right) \end{array} Zv=βv(XvWv),βvij=∑k=1Texp(evik)exp(evij)evij=(F′((XvWq)(XvWk)T)ij+Mij)
上式的形式与self-attention的形式一致。其中的 M ∈ R T × T \mathbf{M} \in \mathbb{R}^{T \times T} M∈RT×T是一个掩码矩阵,
M i j = { 0 , i ≤ j − ∞ , otherwise M_{i j}=\left\{\begin{array}{ll} 0, & i \leq j \\ -\infty, & \text { otherwise } \end{array}\right. Mij={
0,−∞,i≤j otherwise
通常一个注意力捕捉的是一个方面的性质,为了捕捉动态图中多个方面的动态性,作者引入了多头注意力,Structural和Temporal都引入了多头注意力机制。
为了训练模型中的参数,论文使用类似神经语言模型中的共现率来优化参数,这点与word2vec和Node2vec中的损失函数很像,损失函数如下, P n t P_n^t Pnt为负采样的结点:
L = ∑ t = 1 T ∑ v ∈ V ( ∑ u ∈ N walk t ( v ) − log ( σ ( < e u t , e v t > ) ) − w n ⋅ ∑ u ′ ∈ P n t ( v ) log ( 1 − σ ( < e u ′ t , e v t > ) ) ) \begin{aligned} L=\sum_{t=1}^{T} \sum_{v \in \mathcal{V}}\left(\sum_{u \in \mathcal{N}_{\text {walk }}^{t}(v)}-\log \left(\sigma\left(<\boldsymbol{e}_{u}^{t}, \boldsymbol{e}_{v}^{t}>\right)\right)\right.\\ &\left.-w_{n} \cdot \sum_{u^{\prime} \in P_{n}^{t}(v)} \log \left(1-\sigma\left(<\boldsymbol{e}_{u^{\prime}}^{t}, \boldsymbol{e}_{v}^{t}>\right)\right)\right) \end{aligned} L=t=1∑Tv∈V∑⎝⎛u∈Nwalk t(v)∑−log(σ(<eut,evt>))−wn⋅u′∈Pnt(v)∑log(1−σ(<eu′t,evt>))⎠⎞
DySAT是先进行structural self-attention再进行temporal self-attention,作者这样设计是因为:随着时间变化,图的结构是不稳定的。
4 方法的优势与局限性
4.1 优势
- 提出了structural和temporal self-attention来学习动态图中的结点表征
- 使用多头注意力机制捕捉多方面的动态性
- 注意力机制适用于并行
4.2 局限性
- 只能适用于结点不变化的动态图
- 以结点的共现率为损失函数引导模型的训练,这样的损失函数可能重点关注的是图的结构,对于动态性更丰富的图(如结点的特征的变化)是不够的
欢迎访问我的个人博客~~~