py-MDNet详解附代码(二):online tracking
关于训练部分,可以看上一篇博客: py-MDNet代码提炼(一):train
这篇主要讲解tracking的部分,内容会比训练阶段要复杂一些。
如果不看论文的在线跟踪部分,或者只看了上一篇博客,那不禁就会有很多问题,下面以 问答的形式点出几个要点:
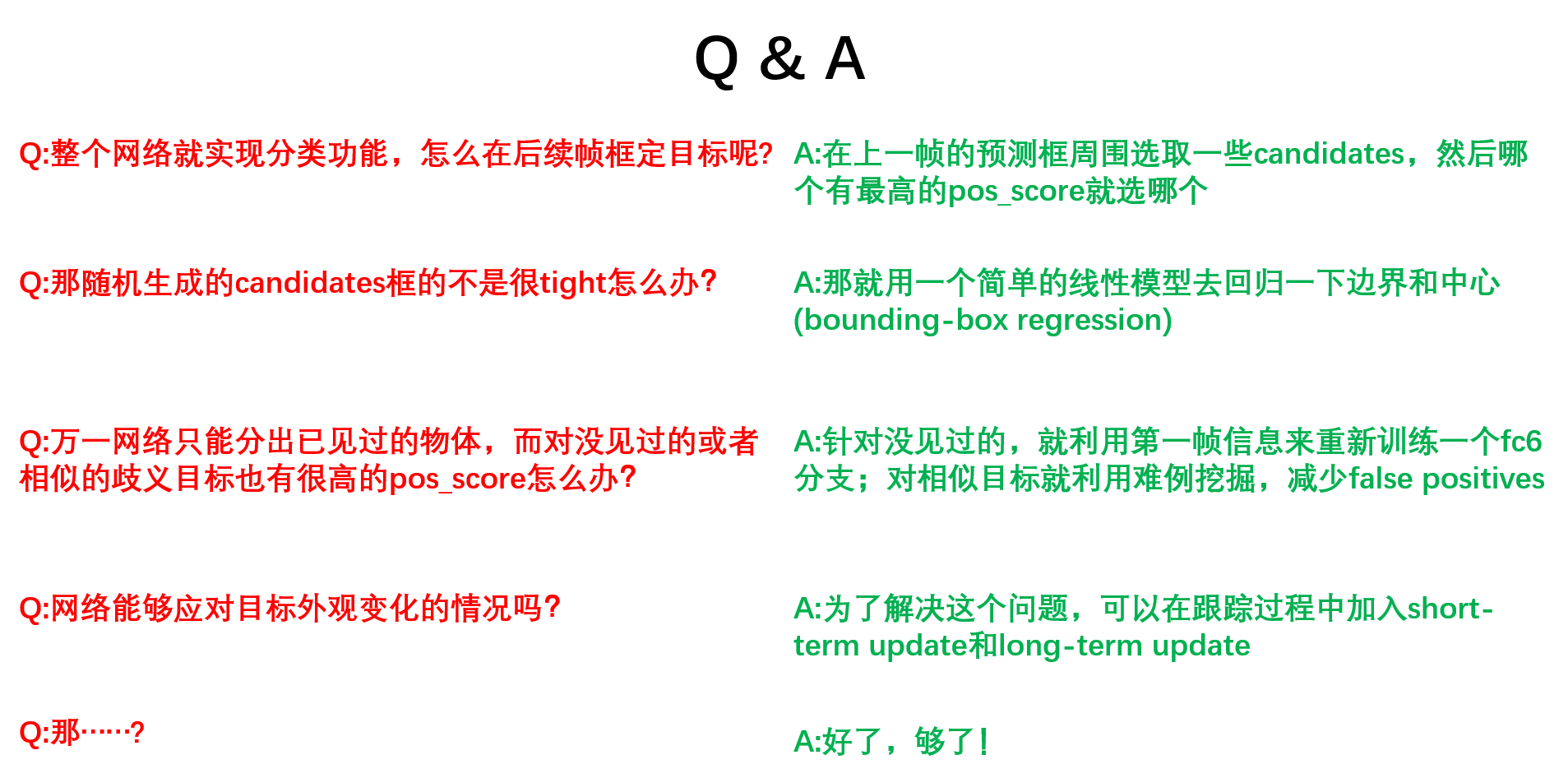
Overall procedure
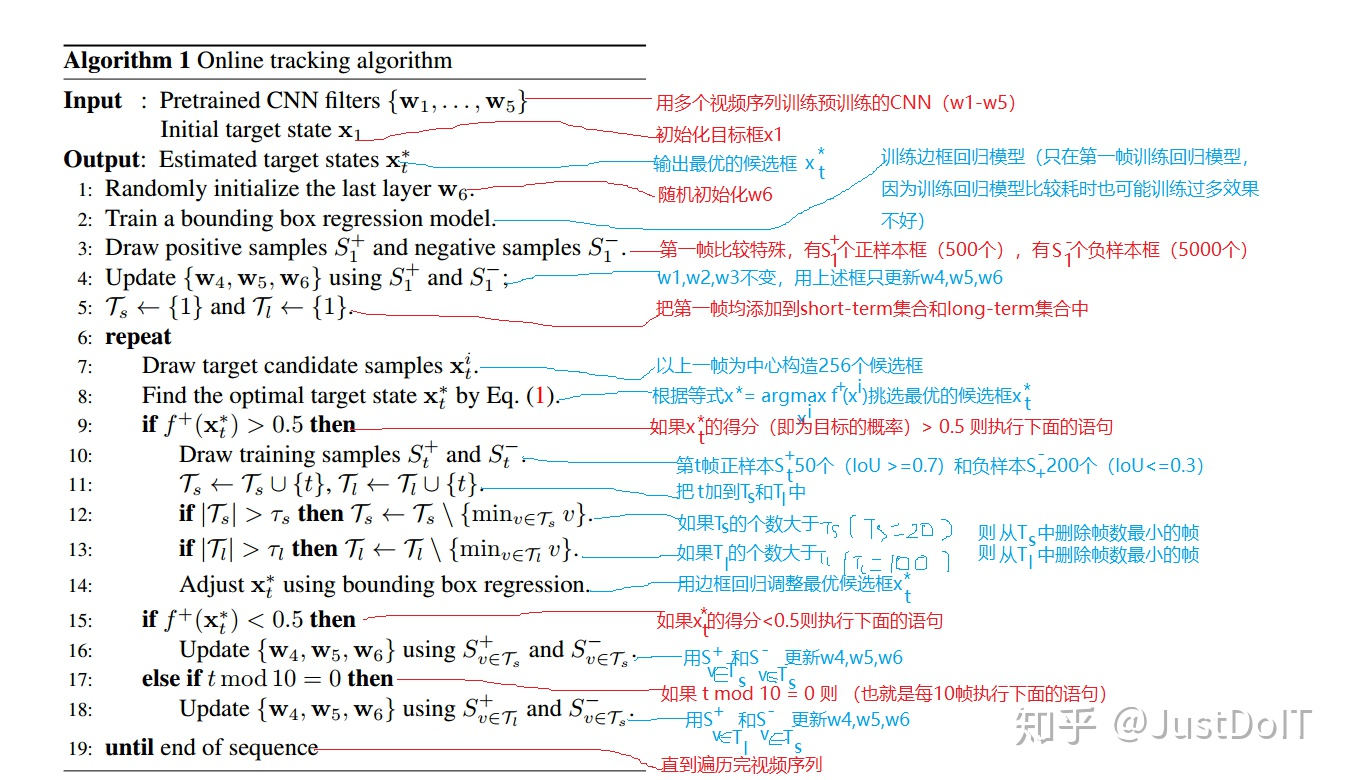
其实tracking阶段主要就是要做上图绿色的四点,整体的过程就如论文中描写的:
- 输入:训练好的网络模型和第一帧目标状态
- 输出:后续帧的预测的目标状态
下面就按照整个流程来说明这四点:
Initial test frame
training
在加载完 w 1 − w 5 w_{1}-w{5} w1−w5完后,会冻结conv1,conv2,conv3,在训练阶段更新全连接层和新的domain-specific layer,如论文中说的:
the multiple branches of domain-specific layers ( f c 6 1 fc6^{1} fc61- f c 6 K fc6^{K} fc6K) are replaced with a single branch (fc6) for a new test sequence. Then we fine-tune the new domain-specific layer and the fully connected layers in the shared network online at the same time
就是上面【line3-4】说的,用 S 1 + = 500 S_{1}^{+}=500 S1+=500个positive samples和 S 1 − = 5000 S_{1}^{-}=5000 S1−=5000个negative samples去训练网络,更新网络的 w 3 , w 4 , w 5 w_{3},w_{4},w_{5} w3,w4,w5,这在代码中就是run_tracker.py中的:
# Draw pos/neg samples
pos_examples = SampleGenerator('gaussian', image.size, opts['trans_pos'], opts['scale_pos'])(
target_bbox, opts['n_pos_init'], opts['overlap_pos_init'])
# 500
neg_examples = np.concatenate([
SampleGenerator('uniform', image.size, opts['trans_neg_init'], opts['scale_neg_init'])(
target_bbox, int(opts['n_neg_init'] * 0.5), opts['overlap_neg_init']),
SampleGenerator('whole', image.size)(
target_bbox, int(opts['n_neg_init'] * 0.5), opts['overlap_neg_init'])])
neg_examples = np.random.permutation(neg_examples)
# 5000
# Extract pos/neg features
pos_feats = forward_samples(model, image, pos_examples)
neg_feats = forward_samples(model, image, neg_examples)
# Initial training including hard negative mining
train(model, criterion, init_optimizer, pos_feats, neg_feats, opts['maxiter_init'])
del init_optimizer, neg_feats
torch.cuda.empty_cache()
BBox regression
这也是在第一帧的时候做的,做bounding box regression是为了improve target localization accuracy,因为随机生成的candidates并不一定是很贴合目标的:
we train a simple linear regression model to predict the precise target location using conv3 features of the samples near the target location.
For bounding-box regression, we use 1000 training examples with the same parameters as [13]
这里就是调用from sklearn.linear_model import Ridge来建立线性模型,具体可看下面这幅图:

当然只有在success需要进行包围框的回归,论文中是:
In the subsequent frames, we adjust the target locations estimated from Eq. (1) using the regression model if the estimated targets are reliable (i.e. f + ( x ∗ ) f^{+}(x^{*}) f+(x∗) > 0.5).
这里判断为reliable的条件可能与论文并不一样,而是通过pos_score的前5名的均值是否大于0来判断,大于0则认为success,代码中是这样体现的:
# Train bbox regressor
bbreg_examples = SampleGenerator('uniform', image.size, opts['trans_bbreg'], opts['scale_bbreg'], opts['aspect_bbreg'])(
target_bbox, opts['n_bbreg'], opts['overlap_bbreg'])
bbreg_feats = forward_samples(model, image, bbreg_examples)
bbreg = BBRegressor(image.size)
bbreg.train(bbreg_feats, bbreg_examples, target_bbox)
# bbreg_feats [1000, 512*3*3]
# bbreg_examples [1000, 4]
# target_bbox [4,]
########### 使用的时候使用predict方法 #########
bbreg_samples = samples[top_idx]
if top_idx.shape[0] == 1:
bbreg_samples = bbreg_samples[None,:]
bbreg_feats = forward_samples(model, image, bbreg_samples)
bbreg_samples = bbreg.predict(bbreg_feats, bbreg_samples)
bbreg_bbox = bbreg_samples.mean(axis=0)
Subsequent frames update
在利用第一帧的先验信息后,就得循环预测序列中的后续帧中的目标状态,也就是上面【line6-18】在做的。
首先在上一帧预测的target location构造265个candidates,然后送入网络得到得分,然后挑选pos_score最高的5个candidates,平均他们的位置作为预测出来的target bbox,然后这时会分两种情况:
- success:
- 1、进行bounding-box regression
- 2、把此时预测出来的target bbox周围的 S t + = 50 S_{t}^{+}=50 St+=50个positive samples和 S t − = 200 S_{t}^{-}=200 St−=200个negative samples的特征并入short-term特征集合 T s \mathcal{T}_{s} Ts和long-term特征集合 T l \mathcal{T}_{l} Tl中,以备后续更新模型时使用(如果超出规定集合元素上限,则删去最前面的特征)
- not success:
- 1、扩大搜索区域(通过扩大samples中心的偏移距离来实现)
- 2、用short-term的特征集合中的特征 S v ∈ T s + S_{v \in \mathcal{T}_{s}}^{+} Sv∈Ts+ and S v ∈ T s − S_{v \in \mathcal{T}_{s}}^{-} Sv∈Ts−来更新模型,来solve target appearance change
- 经过10帧就进行一次long-term update(这里之所以称作long-term update,是因为使用了long-term features S v ∈ T l + S_{v \in \mathcal{T}_{l}}^{+} Sv∈Tl+ 和 S v ∈ T s − S_{v \in \mathcal{T}_{s}}^{-} Sv∈Ts−)
代码中的体现:
# Bbox regression
if success:
bbreg_samples = samples[top_idx]
if top_idx.shape[0] == 1:
bbreg_samples = bbreg_samples[None,:]
bbreg_feats = forward_samples(model, image, bbreg_samples)
bbreg_samples = bbreg.predict(bbreg_feats, bbreg_samples)
bbreg_bbox = bbreg_samples.mean(axis=0)
else:
bbreg_bbox = target_bbox
# Data collect
if success:
pos_examples = pos_generator(target_bbox, opts['n_pos_update'], opts['overlap_pos_update'])
pos_feats = forward_samples(model, image, pos_examples)
pos_feats_all.append(pos_feats)
if len(pos_feats_all) > opts['n_frames_long']:
del pos_feats_all[0]
neg_examples = neg_generator(target_bbox, opts['n_neg_update'], opts['overlap_neg_update'])
neg_feats = forward_samples(model, image, neg_examples)
neg_feats_all.append(neg_feats)
if len(neg_feats_all) > opts['n_frames_short']:
del neg_feats_all[0]
# Expand search area at failure
if success:
sample_generator.set_trans(opts['trans'])
else:
sample_generator.expand_trans(opts['trans_limit'])
# Short term update
if not success:
nframes = min(opts['n_frames_short'], len(pos_feats_all))
pos_data = torch.cat(pos_feats_all[-nframes:], 0)
neg_data = torch.cat(neg_feats_all, 0)
train(model, criterion, update_optimizer, pos_data, neg_data, opts['maxiter_update'])
# Long term update
elif i % opts['long_interval'] == 0:
pos_data = torch.cat(pos_feats_all, 0)
neg_data = torch.cat(neg_feats_all, 0)
train(model, criterion, update_optimizer, pos_data, neg_data, opts['maxiter_update'])
Hard negative mining
难例挖掘就是为了一些困难负样本用来训练分类器,使得对相似物体具有更强的分辨力,难例挖掘是在用初始帧进行初始训练的时候进行的,从1024个negative samples中选择96个pos_score最高的negative samples来作为难例负样本送入分类器的训练。下面是我训练过程中的可视化:

Results on OTB100
下面这是用他的预训练模型mdnet_vot-otb.pth,然后用OTB python version benchmark跑出来的结果,和他给的figs下的很接近:

Demo
gif太大了,博客放不了,我放在码云上了:
Blurcar1:https://gitee.com/laisimiao/picBed/raw/master/image/BlurCar1.gif
Biker:https://gitee.com/laisimiao/picBed/raw/master/image/Biker.gif
{kind=link}
{kind=link}
Bonus
视频讲解:https://www.bilibili.com/video/BV1qt4y1X7SQ/
References
- 算法流程图来自于这篇博客:目标跟踪(一)之MDNet