ELMO驱动器 Feedback B接入编码器,并读取编码器数值
其他
2021-03-24 04:04:44
阅读次数: 0
- 最近小车采用了新的控制方式,由上位机直接通过RS232和驱动器通信,拆掉了BBB板。原来末端的编码器也就没地方接入了,电机后端的编码器已接入了FeedBack A,因为更换了控制方式,故将编码器接入Feedback B,作为辅助编码器使用。
1. 模式选择
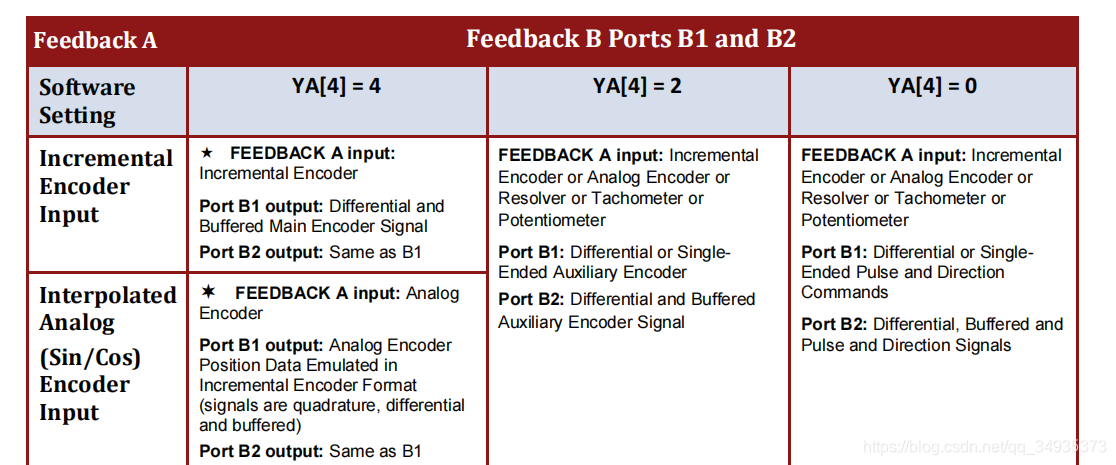
- 首先看上面这张图,我们的Feedback A接入的是增量式编码器,Feedback B也将接入编码器,故应该选择YA[4]=2的模式。
2. Feedback B接线
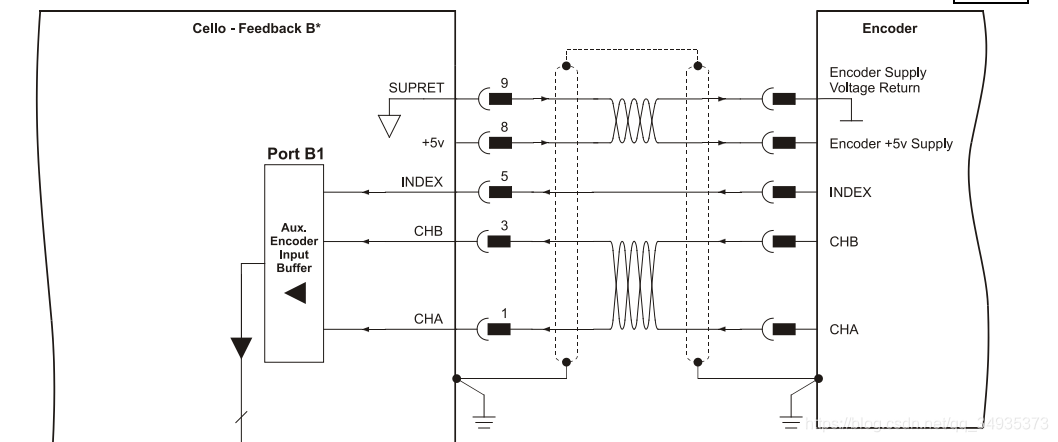
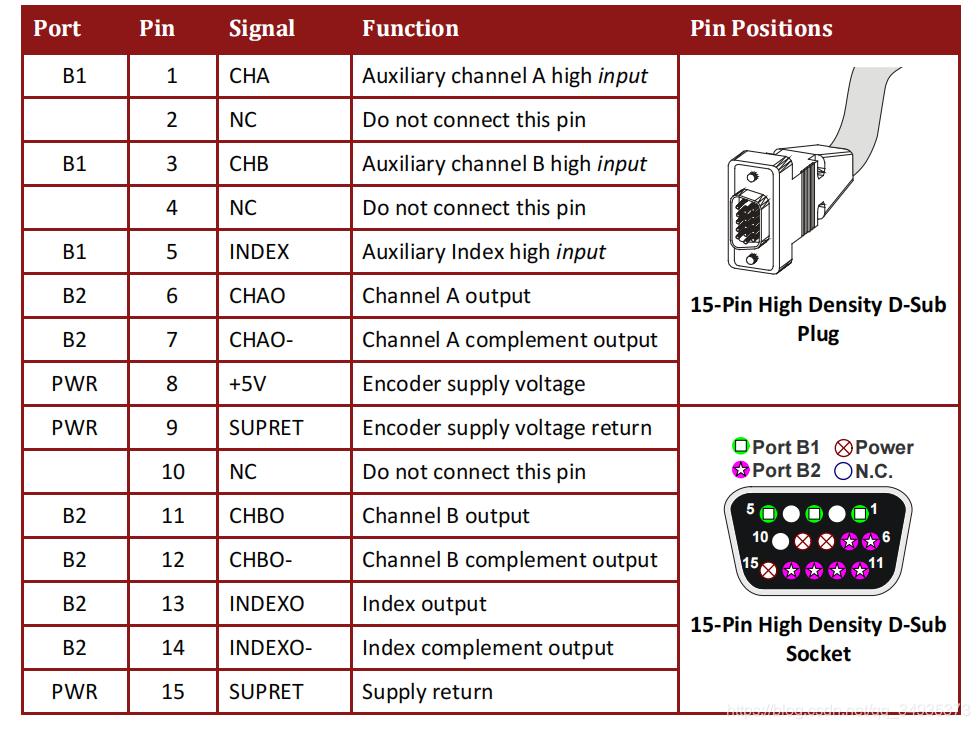
- 末端编码器只有A相,B相,Z相单线,故只能采用单端接法,接线图如下所示
3. 数据读取
3.1 初始化
- 当记录器处于工作状态时不能进行编程,所以要进行初始化使用命令
RR=-0
3.2 信号映射
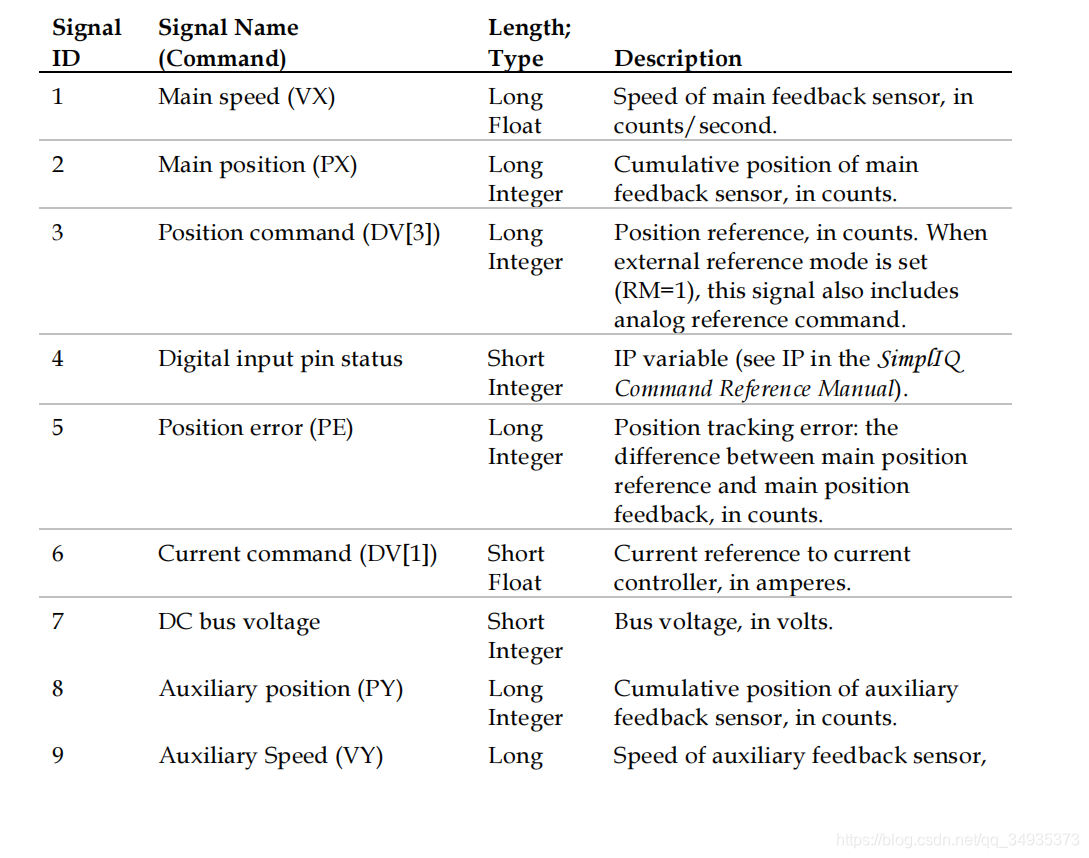
- 由上面的信号表可知我们需要
VX(Feedback A速度信息) PX(Feedback A的位置信息) PY(feedback B的速度信息) VY(Feedback B的位置信息),他们对应的signal Id分别是1,2,8,9,发现他们不是连在一起的,故要对信号进行重映射。
- 命令
RV[N]=x:将信号id x给映射到N,比如这里我们就需要使用命令:RV[3]=8;RV[4]=9;
- 命令
RC=n:取需要的数据,16位二进制,从右往左需要位置的数据就填1,不用就填0,最后转十进制,就是n的值。比如我们这里要取1~4位的数据,那么二进制就是0000 0000 0000 1111,对应的十进制就是15,使用命令:RC=15
转载自blog.csdn.net/qq_34935373/article/details/115095366