绪论


线性表


头插法

尾插法


栈和队列
栈:先进后出


队列:先进先出


循环队列



树和二叉树

二叉树:每个节点最多有两个分支(分支的度小于2)的树结构,可为空树。
根节点:一棵树最上面的节点称为根节点。
左右子树:某个节点的左分支叫做左子树,右分支叫做右子树。
左右孩子:某个节点的左、右分支的根节点叫做该节点的左、右孩子。
兄弟节点:具有相同父节点的节点互为兄弟节点。
节点的度:节点拥有的子树数。
叶子节点:没有任何子节点的节点称为叶子节点。
内部节点:非叶子节点称为内部节点。
根的层次:从根节点开始定义,根为第一层,根的孩子为第二层,如此计数,直到该结点为止。
树的深度和高度:二叉树中节点的最大层次称为二叉树的深度或高度。
森林:由m(m>=0)棵互不相交的树的集合称为森林。如上图只有一个树也是森林。
一般树与二叉树的区别
- 树的结点个数至少为1,而二叉树的结点个数可以为0;
- 树的结点最大度数没有限制,而二叉树结点的最大度数为2;
- 树的结点无左、右之分,而二叉树的结点有左、右之分。
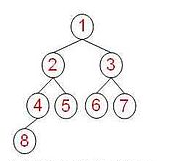
1)、完全二叉树
在一棵二叉树中,除了最后一层,都是满的,并且最后一层或者是满的,或者是右边缺少连续若干节点,成为完全二叉树。
如图所示:

2)、满二叉树
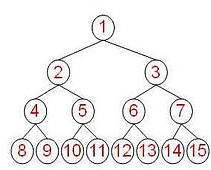



图
几个点 来确定 是否是 连通图 王道里的 ?
无向完全图:边的取值范围 0-n(n-1)/2
有向完全图:边的取值范围 0-n(n-1)
若图中顶点数为n,则它的生成树含n-1条边
若一个图有n个顶点,并且边数小于n-1,则此图必是非连通图。
邻接矩阵:适用于稠密图(浪费大量存储空间)
邻接表法:适用于稀疏图(边数少)
DFS 深度 先序 栈 时间复杂度 邻接矩阵O(n^2) 邻接表O(n+e) n个顶点 e条边
BFS 广度 层序 队列 时间复杂度 邻接矩阵O(n^2) 邻接表O(n+e) n个顶点 e条边
最小生成树性质:
1.最小生成树不唯一
2.最小生成树的边的权值之和唯一
3.最小生成树的边数为顶点数减1
Prim算法 :适用于边稠密的图 像 最短路径 Dijkstra算法 时间复杂度 O(n^2)
Kruskal算法:适用于边稀疏而顶点多的图 时间复杂度 O(eloge)
最短路径 时间复杂度 O(n^2)
Floyd算法 时间复杂度 O(n^3) 适用于稠密图
查找
静态查找:只查不改 (顺序查找、二分查找)
动态查找:动态地插或删的表
平均查找长度:ASL
顺序查找:在线性表中查找,(在有序表或无序表查找)
查找成功:ASL=(n+1)/2
查找不成功:ASL=n+1
顺序查找缺点:n大时,平均查找长度较大,效率低 优点:对数据元素存储无要求
线性链表只能进行顺序查找
二分查找:时间复杂度 O(long2n)
只适合顺序存储结构,不适合链式存储结构,要先排序。
散列表:建立了关键字和存储地址之间的直接映射关系。 时间复杂度 O(1)
再散列法
拉链法
影响散列表查找效率的三个因素:散列函数,处理冲突的方法和装填因子
排序
都是内部排序
直接插入排序
空间复杂度 O(1)
时间复杂度:最好情况 O(n)
最坏情况 O(n^2)
平均情况 O(n^2)
稳定性:稳定排序
适用于:顺序存储和链式存储的线性表
冒泡排序
空间复杂度 O(1)
时间复杂度:最好情况 O(n)
最坏情况 O(n^2)
平均情况 O(n^2)
稳定性:稳定排序
选择排序
空间复杂度 O(1)
时间复杂度:始终是 O(n^2)
平均情况 O(n^2)
稳定性:不稳定排序