来源:OpenCV中文网
目标检测篇:
本篇继续对目标检测相关论文进行整理,共计 14 篇。包含2D、 3D、雷达、小目标、带方向的、半监督目标检测、弱监督目标定位等。
如有遗漏,欢迎补充。
下载包含这些论文的 WACV 2021 所有论文:链接: https://pan.baidu.com/s/1vShaCoOrQZ0gTlEPhbUsAg
提取码: [hide] uxp2 [/hide]
3D目标检测
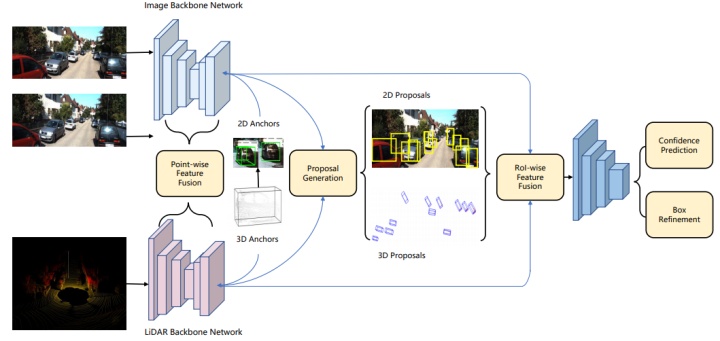
[1].Cross-Modality 3D Object Detection
跨模态3D目标检测。文中提出一个两阶多模态融合框架,结合最佳状态的双目图像对和点云来进行 3D 目标检测。另外,使用 stereo matching 伪激光雷达点作为一种数据增强方法,以使激光雷达点密集化。
作者 | Ming Zhu, Chao Ma, Pan Ji, Xiaokang Yang
单位 | 上海交通大学;NEC Laboratories America
论文 | https://arxiv.org/abs/2008.10436
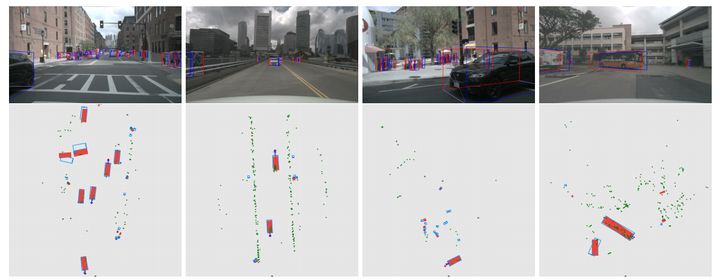
[2].CenterFusion: Center-based Radar and Camera Fusion for 3D Object Detection
旨在使用低成本的雷达(redar)替换自动驾驶中的激光雷达,并达到高精度3D目标检测的方法。已开源。
作者 | Ramin Nabati, Hairong Qi
单位 | 田纳西大学诺克斯维尔
论文 | https://arxiv.org/abs/2011.04841
代码 | https://github.com/mrnabati/CenterFusion
详解 | CenterFusion:融合雷达与摄像头数据的高精度3D目标检测
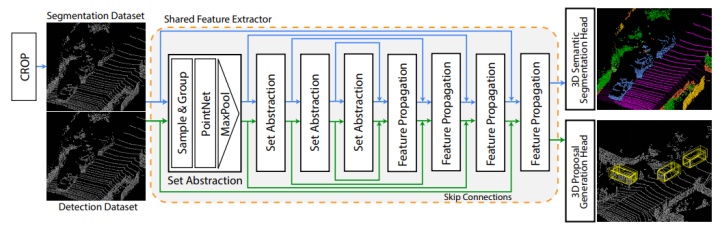
[3].Improving Point Cloud Semantic Segmentation by Learning 3D Object Detection
提出 Detection Aware 3D Semantic Segmentation (DASS) 网络来解决当前架构的局限性。DASS 可以在保持高精度鸟瞰(BEV)检测结果的同时,将几何相似类的 3D语义分割结果提高到图像 FOV 的 37.8% IoU。
作者 | Ozan Unal, Luc Van Gool, Dengxin Dai
单位 | 苏黎世联邦理工学院;鲁汶大学
论文 | https://arxiv.org/abs/2009.10569
半监督目标检测
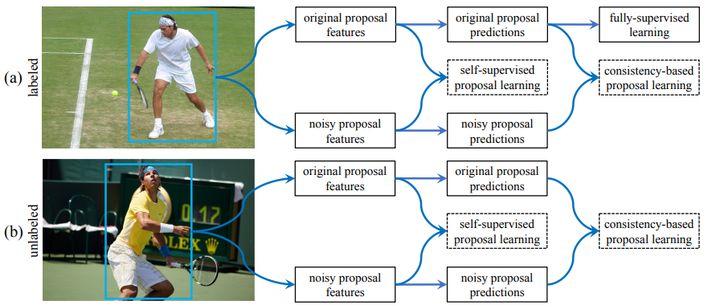
[4].Proposal Learning for Semi-Supervised Object Detection
作者提出一种 proposal 学习方法,从标记和未标记的数据中学习proposal 特征和预测。该方法包括 :
- 一种自监督的 proposal 学习模块,通过 proposal 位置损失和对比损失分别学习上下文感知和噪声粗糙的 proposal 特征
- 一个基于一致性的 proposal 学习模块,通过一致性损失学习噪声鲁棒proposal 特征和预测,用于边界盒分类和回归预测
在COCO数据集上,所提出方法比各种基于 Faster R-CNN 的完全监督基线和数据蒸馏分别高出约 2.0% 和 0.9%。
作者 | Peng Tang, Chetan Ramaiah, Yan Wang, Ran Xu, Caiming Xiong
单位 | Salesforce Research;约翰斯霍普金斯大学
论文 | https://arxiv.org/abs/2001.05086
小目标检测
[5].Effective Fusion Factor in FPN for Tiny Object Detection
作者 | Yuqi Gong, Xuehui Yu, Yao Ding, Xiaoke Peng, Jian Zhao, Zhenjun Han
单位 | 国科大;Institute of North Electronic Equipment
论文 | https://arxiv.org/abs/2011.02298
代码 | coming

[6].Oriented Object Detection in Aerial Images With Box Boundary-Aware Vectors
提出一个简单有效的策略:BBAVectors 来描述带方向的目标。BBAVectors 是在同一笛卡尔坐标系中对所有任意方向的目标进行测量。与之前的学习目标的宽度、高度和角度的基线方法相比,BBAVectors的性能更好。
将基于中心关键点的目标检测器扩展到定向目标检测任务中。该模型的特点:单阶段、anchor box free、快速和准确。在 DOTA 和 HRSC2016 数据集上实现了最先进的性能。
作者 | Jingru Yi, Pengxiang Wu, Bo Liu, Qiaoying Huang, Hui Qu, Dimitris Metaxas
单位 | 罗格斯大学论文 | https://arxiv.org/abs/2008.07043
代码 | https://github.com/yijingru/BBAVectors-Oriented-Object-Detection

[7].Generalized Object Detection on Fisheye Cameras for Autonomous Driving: Dataset, Representations and Baseline
鱼眼相机覆盖视野广阔,作者系统全面研究了自动驾驶场景鱼眼相机目标检测,作者提出了新的表示方法,数据集和基线算法,相比于之前的工作,获得了显著的改进。
作者 | Hazem Rashed, Eslam Mohamed, Ganesh Sistu, Varun Ravi Kumar, Ciaran Eising, Ahmad El-Sallab, Senthil Yogamani
单位 | Valeo R&D等
论文 | https://arxiv.org/abs/2012.02124
FisheyeYOLO_腾讯视频•v.qq.com
雷达目标检测
[8].RODNet: Radar Object Detection Using Cross-Modal Supervision
提出一种全新的雷达目标检测网络:RODNet,无需摄像头或激光雷达情况下,用在各种驾驶场景下进行鲁棒的目标检测。一个摄像机-雷达融合(CRF)跨模态监管框架,用于训练 RODNet,无需繁琐且可能不一致的人为标注。
作者还收集了一个新的数据集:CRUW,包含相机和雷达的同步数据,对相机-雷达跨模式研究很有价值。以及一种新的雷达目标检测任务的评价方法,并对其有效性进行了论证。
作者 | Yizhou Wang, Zhongyu Jiang, Xiangyu Gao, Jenq-Neng Hwang, Guanbin Xing, Hui Liu
单位 | 华盛顿大学;Silkwave Holdings Limited
论文 | https://openaccess.thecvf.com/content/WACV2021/papers/Wang_RODNet_Radar_Object_Detection_Using_Cross-Modal_Supervision_WACV_2021_paper.pdf
代码 | https://github.com/yizhou-wang/RODNet
数据集 | https://www.cruwdataset.org/

无监督目标定位
Improve CAM With Auto-Adapted Segmentation and Co-Supervised AugmentationWSOL
弱监督目标定位是一种仅使用图像级标签,而不包含位置注释的目标定位方法。本次工作,主要针对 WSOL 任务,作者提出 CSoA。由两个模块组成,对传统的卷积网络进行改进,在不牺牲识别能力的前提下提高其定位性能。
在学习过程中,ConfSeg 模块鼓励网络内部的两个分类器生成更精确和完整的CAM。此外,CoAug 模块基于度量方法对不同样本的 CAM 进行批量调节。最终模型在两个公共基准上优于所有之前的方法,成为新的最先进技术,为解决 WSOL 问题提供了新的见解。
作者 | Ziyi Kou, Guofeng Cui, Shaojie Wang, Wentian Zhao, Chenliang Xu
单位 | 圣母大学;罗格斯大学;圣路易斯华盛顿大学;Adobe;罗切斯特大学
论文 | https://arxiv.org/abs/1911.07160

目标检测
[9].CPM R-CNN: Calibrating Point-Guided Misalignment in Object Detection
该文指出 Point-Guided 网络中检测精度的瓶颈原因在于两种错位问题,并提出解决方案:CPM R-CNN。提出 cascade mapping 以便获得更完整的box分布,并证明了它的有效性。所设计的简单有效的融合评分结构与原来的相比有很大改进。
与 Faster R-CNN 和基于 ResNet-101 与 FPN 的 Grid R-CNN 相比,所提出方法在 without whistles and bells 情况下分别大幅提高 3.3% 和 1.5% mAP。此外,最佳模型在 COCO 测试设备上的改进幅度较大,达到 49.9%。
作者 | Bin Zhu, Qing Song, Lu Yang, Zhihui Wang, Chun Liu, Mengjie Hu
单位 | 北京邮电大学
论文 | https://arxiv.org/abs/2003.03570
代码 | https://github.com/zhubinQAQ/CPM-R-CNN

[10].Towards Resolving the Challenge of Long-tail Distribution in UAV Images for Object Detection
目前无人机图像目标检测存在的问题是无人机图像类别分布分布,就此问题,作者提出 Dual Sampler and Head detection Network (DSHNet),是首个旨在解决无人机图像中长尾分布的工作。
DSHNet 的关键组成是 Class-Biased Samplers (CBS) 和 Bilateral Box Heads (BBH),是为应对尾部类和头部类的双路径方式而开发。
DSHNet显著提升了尾类在不同检测框架上的性能。并在 VisDrone 和UAVDT 数据集上,性能明显优于基础检测器和通用方法。当与图像裁剪方法等数据增广方法相结合时,它实现了新 SOTA。
作者 | Weiping Yu, Taojiannan Yang, Chen Chen
单位 | 北卡罗来纳大学夏洛特分校
论文 | https://arxiv.org/abs/2011.03822
代码 | https://github.com/we1pingyu/DSHNet

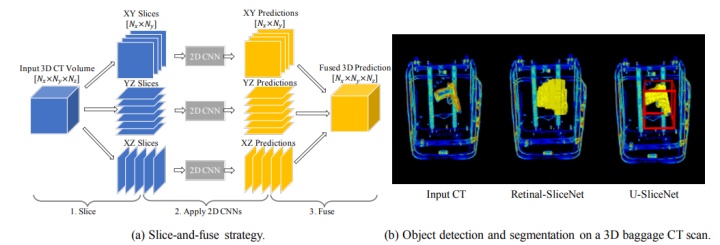
[11].SliceNets – A Scalable Approach for Object Detection in 3D CT ScansSliceNets:用于 3D CT扫描中目标检测的可扩展方法
作者 | Anqi Yang, Feng Pan, Vishwanath Saragadam, Duy Dao, Zhuo Hui, Jen-Hao Rick Chang, Aswin C. Sankaranarayanan
单位 | 卡内基梅隆大学;IDSS Corporation
论文 | https://openaccess.thecvf.com/content/WACV2021/papers/Yang_SliceNets_–_A_Scalable_Approach_for_Object_Detection_in_3D_WACV_2021_paper.pdf
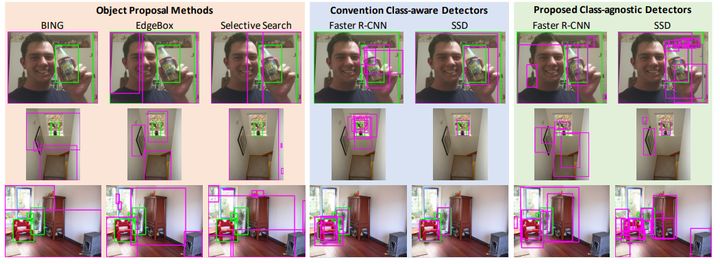
[12].Class-Agnostic Object Detection
在很多问题中,目标的存在位置信息比类别信息更重要,于是该文作者提出一种新型 class-agnostic(可不知类别的) 目标检测问题表述,作为新的研究方向。制订训练和评估协议,以确定基准和推进研究;设计一个新的对抗式学习框架,用于类诊断检测,强制模型从用于预测的特征中排除 class-specific 信息。实验结果表明,对抗式学习提高了 class-agnostic 识别的检测效率。
作者 | Ayush Jaiswal, Yue Wu, Pradeep Natarajan, Premkumar Natarajan
单位 | Amazon Alexa
论文 | https://arxiv.org/abs/2011.14204
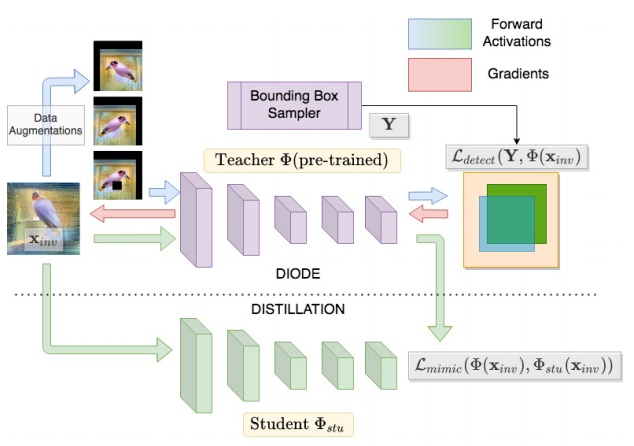
[13].Data-Free Knowledge Distillation for Object Detection
用于目标检测的无数据知识蒸馏技术,由两部分组成:DIODE,通过模型逆映射从预训练检测模型中合成图像的框架;一个无数据模仿学习方法,对从老师对学生合成的图像进行知识蒸馏,用于目标检测。实验验证了合成图像的质量和通用性,检测效率与域外数据集(0.313 mAP)相比,有显著的改进(0.450 mAP),并且与同域数据集(0.466 mAP)具有竞争力。
作者 | Akshay Chawla, Hongxu Yin, Pavlo Molchanov, Jose Alvarez
单位 | 英伟达
论文 | https://openaccess.thecvf.com/content/WACV2021/papers/Chawla_Data-Free_Knowledge_Distillation_for_Object_Detection_WACV_2021_paper.pdf
- END -
图像分割篇:
本篇文章盘点WACV2021图像分割相关论文,包括抠图、实例、全景、语义分割,自然灾害评估等相关应用。值得关注的是有一篇文本抠图,在以往工作中很少或从未研究过的。
共计 11 篇。如有遗漏,欢迎补充。
下载包含这些论文的 WACV 2021 所有论文:
『WACV 2021 开幕,更偏重技术应用,附论文下载』
实例分割
[1].Weakly Supervised Instance Segmentation by Deep Community Learning
文中作者引入一个用于弱监督实例分割的深度社区学习框架,该框架基于一个端到端可训练的深度神经网络,在目标检测、实例掩码生成和目标分割多个任务之间有主动交互。
加入两种有经验的目标定位技术:class-agnostic bounding box regression 和 segmentation proposal generation,且是在没有完全监督的情况下进行的。
所提出的算法在不进行后处理情况下,在标准基准数据集上实现了比现有弱监督方法大幅提高的性能。
作者 | Jaedong Hwang, Seohyun Kim, Jeany Son, Bohyung Han
单位 | 首尔大学;ETRI
论文 | https://arxiv.org/abs/2001.11207
主页 | https://cv.snu.ac.kr/research/WSIS_CL/

#WACV 2021##航空影像##实例分割#
[2].MSNet: A Multilevel Instance Segmentation Network for Natural Disaster Damage Assessment in Aerial Videos
MSNet:用于航空视频自然灾害评估的多级实例分割网络
本文研究通过航空视频分析,有效评估飓风、洪水或火灾等自然灾害后的建筑物损失问题。做出了两个主要贡献:
第一个贡献是一个新的数据集,包括来自社交媒体用户生成的航拍视频,并带有实例级的建筑损伤掩码标注。为利用航拍视频评估建筑物损伤的模型的定量评估提供了第一个基准。
第二个贡献是一个新的模型:MSNet,包含了新的区域 proposal 网络设计和一个无监督的分数细化网络,用于边界盒和掩模分支的置信度分数校准。
实验表明,新的模型和新的数据集与以前的方法相比,取得了最先进的结果。
作者表示将发布数据、模型和代码。
作者 | Xiaoyu Zhu, Junwei Liang, Alexander Hauptmann
单位 | 卡内基梅隆大学
论文 | https://w.url.cn/s/AC2eIwl
代码 | https://github.com/zgzxy001/MSNET

语义分割
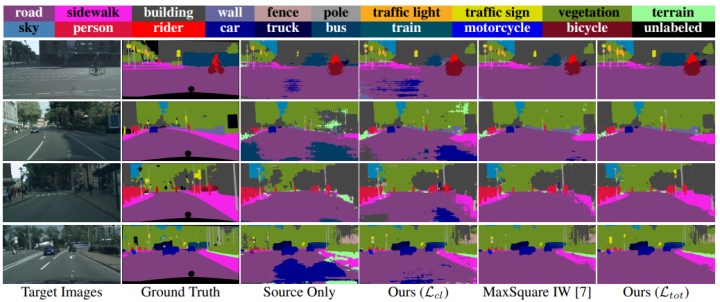
[3].Unsupervised Domain Adaptation in Semantic Segmentation via Orthogonal and Clustered Embeddings
作者 | Marco Toldo, Umberto Michieli, Pietro Zanuttigh
单位 | 意大利帕多瓦大学
论文 | https://arxiv.org/abs/2011.12616
主页 | https://lttm.dei.unipd.it/paper_data/UDAclustering/
代码 | https://github.com/LTTM/UDAclustering
[4].Improving Point Cloud Semantic Segmentation by Learning 3D Object Detection
提出 Detection Aware 3D Semantic Segmentation (DASS) 网络来解决当前架构的局限性。DASS 可以在保持高精度鸟瞰(BEV)检测结果的同时,将几何相似类的 3D语义分割结果提高到图像 FOV 的 37.8% IoU。
作者 | Ozan Unal, Luc Van Gool, Dengxin Dai
单位 | 苏黎世联邦理工学院;鲁汶大学
论文 | https://arxiv.org/abs/2009.10569
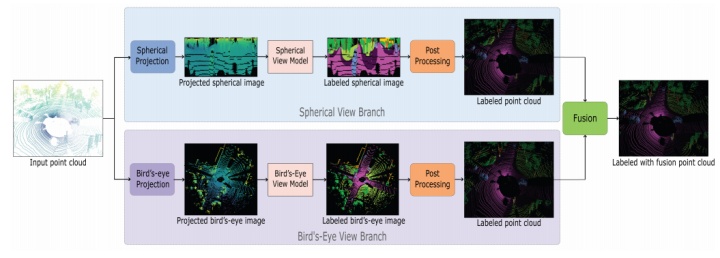
[5].Multi Projection Fusion for Real-Time Semantic Segmentation of 3D LiDAR Point Clouds
本次工作,作者提出全新的 multi-projection 融合框架,通过使用球面和鸟瞰投影,利用 soft voting 机制对结果进行融合,实现点云语义分割。
所提出的框架在 SemanticKITTI 数据集上的mIoU达到了 55.5,高于最先进的基于single projection 的方法 RangeNet++ 和 PolarNet,比前者快1.6倍,比后者快3.1倍。同时具有更高的 throughput(吞吐量)。
对于未来工作方向,作者称将两种 projections 结合成单一的多视图统一模型,并研究在框架内使用两种以上的 projections 。
作者 | Yara Ali Alnaggar, Mohamed Afifi, Karim Amer, Mohamed Elhelw
单位 | Nile University;
论文 | https://arxiv.org/abs/2011.01974
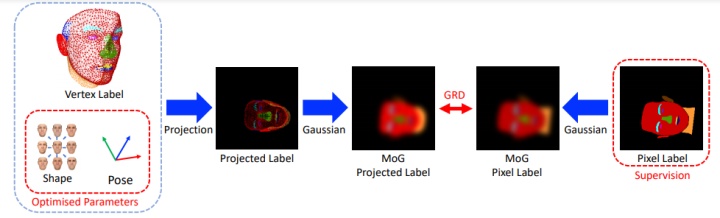
[6].Shape From Semantic Segmentation via the Geometric Renyi Divergence
作者 | Tatsuro Koizumi, William A. P. Smith
单位 | 约克大学
论文 | https://openaccess.thecvf.com/content/WACV2021/papers/Koizumi_Shape_From_Semantic_Segmentation_via_the_Geometric_Renyi_Divergence_WACV_2021_paper.pdf
全景分割
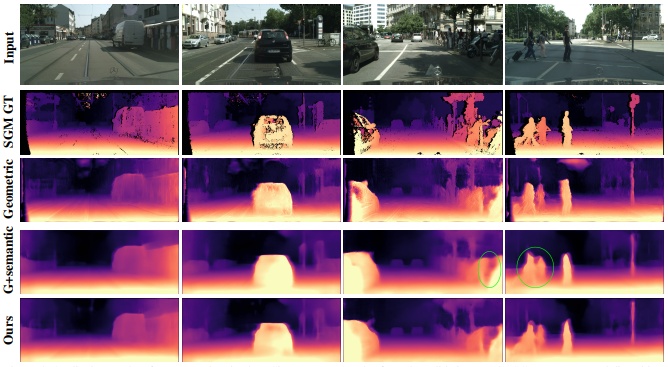
[7].Boosting Monocular Depth With Panoptic Segmentation Maps作者 | Faraz Saeedan, Stefan Roth
单位 | 达姆施塔特工业大学
论文 | https://openaccess.thecvf.com/content/WACV2021/papers/Saeedan_Boosting_Monocular_Depth_With_Panoptic_Segmentation_Maps_WACV_2021_paper.pdf
视频目标分割
[8].Reducing the Annotation Effort for Video Object Segmentation Datasets
为进一步改进视频目标分割的性能,需要更大、更多样化、更具挑战性的数据集。然而用像素掩码对每一帧进行密集标注并不能扩展到大型数据集。因此作者使用深度卷积网络,从较便宜的边界框标注中自动创建像素级的伪标签,并研究这种伪标签能在多大程度上承载训练最先进的VOS方法。
令人欣喜的是,仅在每个对象的单个视频帧中添加一个手动标注的掩码,足以生成伪标签,用来训练VOS方法,并达到与完全分割视频训练时几乎相同的性能水平。基于此,为 TAO 数据集的训练集创建像素伪标签,手动标注验证集的一个子集。得到了新的TAO-VOS基准,公布在 https://www.vision.rwth-aachen.de/page/taovos(近期公开)
作者 | Paul Voigtlaender, Lishu Luo, Chun Yuan, Yong Jiang, Bastian Leibe
单位 | 亚琛工业大学;清华大学
论文 | https://arxiv.org/abs/2011.01142
代码 | https://www.vision.rwth-aachen.de/page/taovos
备注 | WACV 2021

目标部分分割
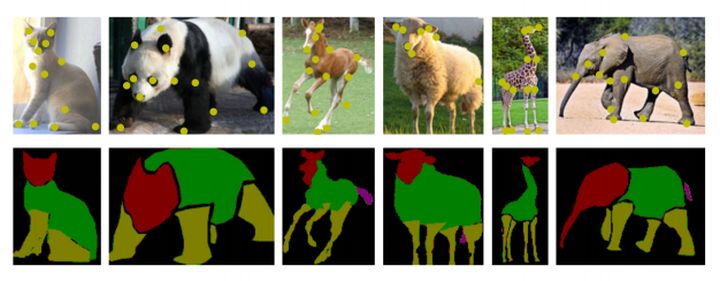
[9].Part Segmentation of Unseen Objects using Keypoint Guidance
作者开发了一种端到端学习方法,利用关键点位置引导迁移学习过程,将 pixel-level 目标部分分割从完全标记的目标集迁移到另一个弱标记的目标集。对于部分分割来说,作者证明非参数化的模板匹配方法比像素分类更有效,特别是对于小的或不太频繁的部分。为验证所提出方法的通用性,作者引入了两个新的数据集,共包含 200 只四足动物,同时具有关键点和部分分割标注。并证明所提出方法在训练过程中使用有限的部分分割标签,可以在新型物体部分分割任务上以较大的优势优于现有模型。
作者 | Shujon Naha, Qingyang Xiao, Prianka Banik, Md. Alimoor Reza, David J. Crandall
单位 | 印第安那大学艺术科学学院
论文 | https://openaccess.thecvf.com/content/WACV2021/papers/Naha_Part_Segmentation_of_Unseen_Objects_Using_Keypoint_Guidance_WACV_2021_paper.pdf
数据集 | http://vision.sice.indiana.edu/animal-pose-part/
图像抠图
Towards Enhancing Fine-Grained Details for Image Matting
提出一个关于图像抠图问题的新观点,明确地将这个任务分为两个部分:一个是提取高级语义线索的语义部分,另一个是提供精细细节和低级纹理线索的纹理补偿部分。
基于这一点,提出一种新的深度图像抠图方法,明确定义了两条路径:编码器-解码器语义路径和无下采样纹理补偿路径。进一步提出了一个新的损失项,帮助网络缓解不准确的trimap问题,更好地检测那些 "纯 "背景部分。所提出的方法在具有挑战性的Adobe Composition1k测试数据集上实现了新的最先进的性能。
作者 | Chang Liu, Henghui Ding, Xudong Jiang
单位 | 南洋理工大学
论文 | https://openaccess.thecvf.com/content/WACV2021/papers/Liu_Towards_Enhancing_Fine-Grained_Details_for_Image_Matting_WACV_2021_paper.pdf

Text Matting
ATM: Attentional Text Matting
本次研究,作者尝试解决从图像背景中提取字符(通常为WordArts)的 Text Matting(文本抠图)问题。与传统的图像抠图问题不同,文本抠图的难度要大得多,因为它的前景有三个特性:小、多目标、结构和边界复杂。
方案是提出一个两阶注意力文本抠图 pipeline,作者称是首个文本抠图方法。构建了一个文本抠图图像合成引擎,并合成了一个具有多样性大规模的高质量文本抠图数据集。
在合成和真实图像数据集上进行了大量实验,证明所提出方法比最先进的图像抠图方法在文本抠图任务上的优越性。
作者 | Peng Kang, Jianping Zhang, Chen Ma, Guiling Sun
单位 | 美国西北大学;加拿大麦吉尔大学;南开大学
论文 |
https://openaccess.thecvf.com/content/WACV2021/papers/Kang_ATM_Attentional_Text_Matting_WACV_2021_paper.pdf
代码 | https://github.com/TextMatting/TextMatting

- END -
下载包含这些论文的 WACV 2021 所有论文:链接: https://pan.baidu.com/s/1vShaCoOrQZ0gTlEPhbUsAg
提取码: [hide] uxp2 [/hide]