内容摘要:为了让电磁屏蔽效能自动测试装置能够在屏蔽室中按照已给定的路径运动,设计了一种开环控制的两轮差速驱动小车,对其运动学进行了分析,并采用双圆弧拟合曲线方法使小车实现按照给定曲线行走。通过大量运动实验验证,利用该方法控制小车能保证小车在行进3 m范围内横向和纵向的偏差小于30 mm,可以满足系统的需要。最后根据实验结果给出了该方法的适用范围,以及进一步减少误差的思路
关键词:差速驱动;运动控制;固定路径;曲线行走
引 言
自动导引车(Automated Guided VehICle,AGV)是一种可以移动的具有一定智能的自主或半自主工作的机器人,在现代物流仓储、柔性制造、军事领域和危险环境下的作业等方面具有广阔的应用前景。
有很多学者对自动导引车的导引及控制方式进行了研究,大多数采用编码器、陀螺仪、测距传感器等对机器人进行位姿检测、路径跟踪,进而对运动进行闭环控制,然而在一些对电磁干扰要求较高或者周围环境复杂的特殊场合有一定的局限性。
本文设计的两轮差速驱动小车作为电磁屏蔽效能自动测试装置的移动平台来使用。由于系统对测试装置电磁兼容要求较高,并且由于屏蔽室内存在大量锥形吸波材料、波导窗、波导管等造成测试环境相对复杂,因而提出一种车身不装传感器的差速驱动轮式小车结构,并且能在一定精度范围内进行曲线运动,在低成本、电磁兼容要求高及复杂环境中具有较大的应用空间。
1 小车驱动方式设计
两轮差速驱动小车常采用的几种驱动方式示意图如图1所示,图中有剖面线的长方形表示由电机控制的驱动轮,小圆圈表示全向自由轮或球形轮,主要起辅助支撑作用。其中图1(a)为三轮式差速驱动,图1(b),图1(c)为带有附加接触点的四轮式差速驱动。图1(d)为六轮式差速驱动。
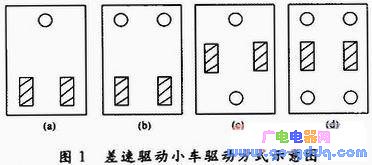
本设计选用方案(c),这个方案的优点是小车旋转半径理论上可以从0到无限大,可以原地回转,运动灵活性好,同时四轮结构相对三轮结构具有较大的承载能力和较好的平稳性。缺点是由于四点着地,如果地面不够平整,有可能会出现驱动轮被架空的情况,导致小车无法正常运动。为了保证四个轮子与地面的可靠接触,在前后支撑轮增加了缓冲机构。
差速驱动小车作为电磁屏蔽效能自动测试装置的移动平台,测试装置对小车定位精度要求较高,而对于运动速度要求不高。步进电动机的角位移量与脉冲数成正比,转速与脉冲频率成正比,能迅速启动、反转、制动,停止时能锁死。因此驱动电机选用步进电机。
步进电机的输出经过减速器传递,减速器输出轴通过联轴器连接到小车的驱动轮上,小车平台与驱动轮通过滚珠轴承连接。步进电机选用42BY250C二相混合式步进电机,额定静转矩为0.54 N·m,配套驱动器为SH-20403型步进电机驱动器,减速器选用减速比为9的PS40003型行星齿轮减速器。
2 运动学分析及建模
图2是两轮差速转向AGV的结构示意图(图中仅画出两个驱动轮)。O1,O2分别是左、右驱动轮的轮心,轮间距O1O2为l,C为O1O2的中心。xOy为大地坐标系,V1,V2及VC分别为左、右驱动轮及车体中心C点的速度。假设C在大地坐标系中的坐标为(x,y),则AGV的姿态角用VC与x轴的夹角θ(规定逆时针时为正)表示,则向量(x,y,θ)表示AGV在大地坐标系xOy中的位姿。
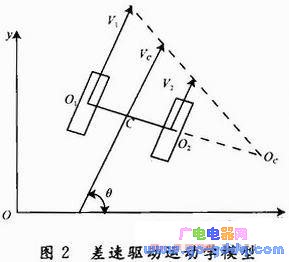
由图2可知,Oc是小车的速度瞬心,在低速运动时忽略横滑影响,根据运动学的知识可知C点的速度VC的大小为:
VC=(V1+V2)/2 (1)
假设小车车体的角速度为ω,如图2所示的情况为做顺时针运动,因此有:
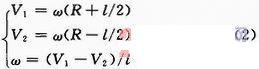
根据刚体平动原理,小车在任意时刻的运动都可以看成是绕车体瞬心OC的转动,转动半径R为:
![]()
由V1,V2之间的三种关系决定了差速驱动小车的三种运动方式: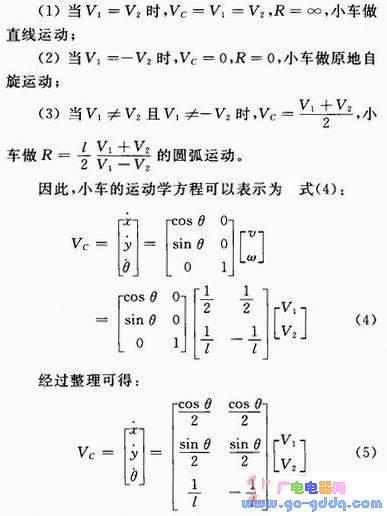
由以上分析可知,文中设计的差速驱动小车为全局可控系统,通过控制两步进电机输入脉冲频率,间接控制小车的线速度VC和角速度ω,理论上可以实现小车在任意位姿的运动;同时由于系统存在约束条件,因此在运动学模型分析时假设车体与地面为纯滚动,且无侧向滑动。
3 曲线行走实现
根据对差速驱动小车的运动学分析,在正常工作情况下,小车可以进行直线或圆弧运动,如果要使小车按照给定曲线运动,则考虑利用圆弧去近似曲线轨迹。
3.1 曲线曲率半径计算
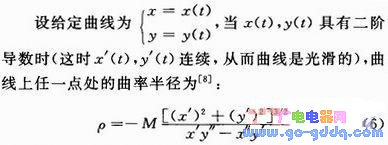
式中:M是转向系数,当曲线上的点按逆时针转时,M=+1;当按顺时针转时,M=-1。
3.2 双圆弧拟合曲线
给定曲线![]() ,在拟合的过程中,为了尽量接近给定曲线,并且在各段的连接点处曲线光滑相切,在这里选择双圆弧拟合法。
,在拟合的过程中,为了尽量接近给定曲线,并且在各段的连接点处曲线光滑相切,在这里选择双圆弧拟合法。
在理论曲线上依据需要的精度选择列表点,并计算出每点处的曲率半径,根据其式(6)判断其凹凸性,再对以下两种情况进行拟合:
(1)所需拟合曲线段内没有拐点
根据式(6),若所需拟合的曲线段的两端点处的曲率半径皆为同号,即认为曲线段内没有拐点,如图3所示。
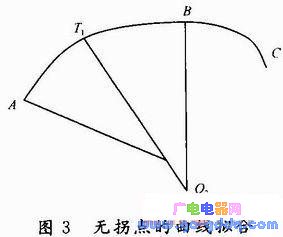
依据小车实际运动状况,在具体拟合时,提出如下拟合要求:
①拟合圆弧必须过列表点;
②列表点两侧圆弧在列表点处光滑相切,且切线斜率与理论曲线在列表点处相等;
③两相邻列表点之间的两段圆弧在圆弧与圆弧交接点处相切;
④曲线段内过列表点的两侧圆弧半径应尽量与理论曲线在列表点处的曲率半径接近。
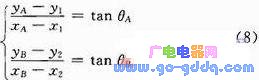
在给定曲线上取列表点A,B,C,…,记它们的坐标分别为(xA,yA),(xB,yB),(zC,yC),…,有:
![]()
根据式(7)可以求出各列表点处的法线斜率角θA,θB,θC,…,根据式(6)可以求出曲率半径ρA,ρB,ρC,…,由这两组数据可以求出理论曲线过列表点的各曲率中心的坐标值。
对于曲线段AB,用![]() 两段圆弧去拟合曲线段AB,圆弧
两段圆弧去拟合曲线段AB,圆弧![]() 的圆心分别在O1和O2,则半径分别为O1A和O2B。O1和O2的坐标分别为(X1,y1)和(x2,y2),为满足之前提到的第①个和第②个要求,应满足关系式:
的圆心分别在O1和O2,则半径分别为O1A和O2B。O1和O2的坐标分别为(X1,y1)和(x2,y2),为满足之前提到的第①个和第②个要求,应满足关系式:
为满足上述第③个要求,应满足以下关系式:
![]()
联立式(8)、式(9),含有4个未知数x1,y1,x2,y2,但只有3个方程,故不能求解。为满足上述第④个要求,以x1为优化变量,以(|ρA|-O1A)2+(|ρB|-O2B)2为目标函数,于是双圆弧拟合问题就转化为以这3个方程为等约束条件,使目标函数(|ρA|-O1A)2+(|ρB|-O2B)2趋于最小的优化问题。具体过程是:以理论曲线过A点的曲率中心的x坐标作为x1的初始值,应用优化算法,优化x1,使得目标函数趋于最小,最终得到的(x1,y1)和(x2,y2)就是用来拟合曲线段的最佳两个圆弧的圆心坐标。
(2)所需拟合的曲线段内有拐点
根据式(6)计算出的理论曲线在相邻两节点处的曲率半径异号,则表明理论曲线在这两点处的曲率方向相反,此时曲线出现拐点,如图4所示。
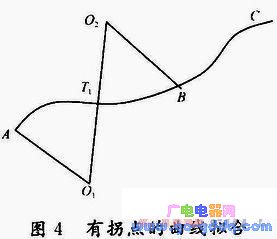
这种情况只需要将第③个要求改为如下关系式:
![]()
就可以和第一种情况一样,通过计算得到拟合圆弧的圆心坐标。
4 实验及结果分析
在实验中,设给定曲线为y=100(x/500+sin(x/500)),x,y的单位为mm,这里设定△x=100 cm,小车从原点处开始运动,通过多次实验,对小车运动到固定的几个点进行测量,对这些点的坐标取平均,近似绘制出实验结果,如图5所示。
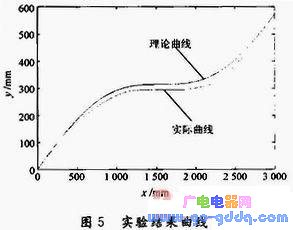
图5中,上方的曲线为理论曲线,下方的曲线为实际行走曲线。可以看出,在小车行进过程中,实际轨迹与理论曲线的偏差不超过30 mm。在实际使用中,基本可以满足给定的30 mm以内的误差要求。
通过对不同给定曲线的实验,发现在曲线的曲率半径小于10 m,并且曲线的变化速率不剧烈的情况下,运动的精度都能得到较好的保证。
由于车轮的转动频率是由单片机产生的,V1和V2是不能连续变化的,所以当曲线的曲率半径越大时,V1和V2的调节范围越小,因而误差会变得很大。这种误差可以通过提高单片机晶振的频率来减小,但不能消除。在实际情况下,可以根据所需要的最大拟合圆弧半径和精度来选择满足要求的晶振。
5 结语
本文根据电磁屏蔽室自动测试装置移动平台的需求,设计了一种差速驱动小车,并介绍了小车的驱动结构、运动学模型、曲线行走算法等,最后对曲线运动进行了实验验证。小车的控制系统为开环控制方式,不能自动修正路径偏差。但由于控制系统结构简单,小车结构容易实现,在一些对电磁干扰要求较高的场合以及由直线、圆弧及不复杂曲线构成的固定路径的机器人领域有着一定的应用前景。