一些笔记
一、OpenCV基础——threshold函数的使用
图像的二值化就是将图像上的像素点的灰度值设置为0或255,这样将使整个图像呈现出明显的黑白效果。在数字图像处理中,二值图像占有非常重要的地位,图像的二值化使图像中数据量大为减少,从而能凸显出目标的轮廓。OpenCV中提供了函数cv::threshold();
threshold函数作用: 去掉噪,例如过滤很小或很大像素值的图像点。
threshold函数python版原型:
retval, dst = cv.threshold( src, thresh, maxval, type[, dst] )
参数说明:
- src:原图像。
- dst:结果图像。
- thresh:当前阈值。
- maxVal:最大阈值,一般为255.
- thresholdType:阈值类型,主要有下面几种:
enum ThresholdTypes {
THRESH_BINARY = 0,
THRESH_BINARY_INV = 1,
THRESH_TRUNC = 2,
THRESH_TOZERO = 3,
THRESH_TOZERO_INV = 4,
THRESH_MASK = 7,
THRESH_OTSU = 8,
THRESH_TRIANGLE = 16
};
返回值:
- retval: 与参数thresh一致
- dst: 结果图像
1、阈值理解
PS解释:“阈值”命令将灰度或彩色图像转换为高对比度的黑白图像。您可以指定某个色阶作为阈值。所有比阈值亮的像素转换为白色;而所有比阈值暗的像素转换为黑色。“阈值”命令对确定图像的最亮和最暗区域很有用。
这里的解释,就是拿黑白2色去阐述你的图片,是可调节的。
二、cv.findContours()寻找轮廓
轮廓可以简单地解释为连接具有相同颜色或强度的所有连续点(沿边界)的曲线。轮廓是用于形状分析以及对象检测和识别的有用工具。
- 为了获得更高的准确性,请使用二进制图像。因此,在找到轮廓之前,请应用阈值或canny边缘检测。
- 从OpenCV 3.2开始,findContours()不再修改源图像。
- 在OpenCV中,找到轮廓就像从黑色背景中找到白色物体。因此请记住,要找到的对象应该是白色,背景应该是黑色。
找到二进制图像的轮廓
# 找到二进制图像的轮廓
import numpy as np
import cv2 as cv
im = cv.imread('鸭子.jpg')
imgray = cv.cvtColor(im, cv.COLOR_BGR2GRAY) # 得到灰度图
ret, thresh = cv.threshold(imgray, 127, 255, 0) # 图像阈值/二值化
contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
# 输出等高线和层次结构 原图像 轮廓检索模式 轮廓逼近方法
findcontour()函数中有三个参数,第一个是源图像,第二个是轮廓检索模式,第三个是轮廓逼近方法。输出等高线和层次结构。轮廓是图像中所有轮廓的Python列表。每个单独的轮廓是一个(x,y)坐标的Numpy数组的边界点的对象。
1、轮廓检索模式 cv.findContours()第二个参数
建立轮廓索引时,按照轮廓从小到大分配索引号。
RECT_EXTERNAL只检测最外层轮廓。
RECT_LIST检测所有轮廓。
这两种模式不建立轮廓等级关系,不管轮廓嵌套与否,均按照轮廓大小依次分配索引。
RECT_CCOMP,RECT_TREE检测所有轮廓
RECT_CCOMP在有轮廓嵌套时,无论嵌套个数多少,只建立两级等级关系
RECT_TREE在有轮廓嵌套时,建立多级等级关系
2、轮廓近似方法 cv.findContours()第三个参数
这是cv.findContours函数中的第三个参数。
上面我们告诉我们轮廓是强度相同的形状的边界。它存储形状边界的(x,y)坐标。但是它存储所有坐标吗?这是通过这种轮廓近似方法指定的。
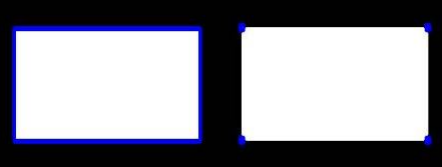
如果传递cv.CHAIN_APPROX_NONE,则将存储所有边界点。但是实际上我们需要所有这些要点吗?例如,您找到了一条直线的轮廓。您是否需要线上的所有点来代表该线?不,我们只需要该线的两个端点即可。这就是cv.CHAIN_APPROX_SIMPLE所做的。它删除所有冗余点并压缩轮廓,从而节省内存。
下面的矩形图像演示了此技术。只需在轮廓数组中的所有坐标上绘制一个圆(以蓝色绘制)。第一幅图像显示了用cv.CHAIN_APPROX_NONE获得的积分(734个点),第二幅图像显示了用cv.CHAIN_APPROX_SIMPLE获得的效果(只有4个点)。看,它可以节省多少内存!!!
三、cv.drawContours()绘制轮廓
要绘制轮廓,请使用cv.drawContours函数。只要有边界点,它也可以用来绘制任何形状。它的第一个参数是源图像,第二个参数是应该作为Python列表传递的轮廓,第三个参数是轮廓的索引(在绘制单个轮廓时有用。要绘制所有轮廓,请递-1),其余参数是颜色,厚度等等
- 在图像中绘制所有轮廓:
cv.drawContours(im, contours, -1, (0, 255, 0), 3)
- 绘制单个轮廓,如第四个轮廓:
cv.drawContours(im, contours, 3, (0, 255, 0), 3)
- 但是在大多数情况下,以下方法会很有用:
cnt = contours[4]
cv.drawContours(im, [cnt], 0, (0, 255, 0), 3)
【代码】学习使用OpenCV中的findContours函数对物体轮廓进行检测
# 找到二进制图像的轮廓
# import numpy as np
import cv2 as cv
im = cv.imread('han3.png')
print(im.shape)
im_background1 = cv.imread('han3.png')
ret2, thresh2 = cv.threshold(im, 127, 255, 0)
im2 = cv.imread('bgr.png')
im3 = cv.imread('bgr.png')
imgray = cv.cvtColor(im, cv.COLOR_BGR2GRAY) # 得到灰度图
# ↓结果图像
ret, thresh = cv.threshold(imgray, 127, 255, 0) # 图像阈值/二值化
# ↑与参数thresh一致
contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
# 输出↑层次结构和↑等高线 原图像 轮廓检索模式 轮廓逼近方法
# Python列表传递的轮廓:层次结构
cv.drawContours(im_background1, contours, -1, (0, 255, 0), 3) # 在图像中绘制所有轮廓
cv.drawContours(im2, contours, -1, (0, 0, 0), 3) # 在图像中绘制所有轮廓
cv.drawContours(im3, contours, 100, (0, 255, 0), 3) # 绘制单个轮廓/第四个轮廓
# 大多数情况使用如下方法
# cnt = contours[4]
# cv.drawContours(im_background1, [cnt], 0, (0, 255, 0), 3)
cv.imshow('thresh2', thresh2)
cv.imshow('thresh', thresh)
cv.imshow('im_background1', im_background1)
cv.imshow('im2', im2)
cv.imshow('im3', im3)
cv.waitKey(0)
cv.destroyAllWindows()
四、【代码】contourArea()函数计算面积
轮廓区域由函数cv.contourArea()或从矩 M[‘m00’] 中给出。
area = cv.contourArea(cnt)
实现代码如下
import cv2
img = cv2.imread('han3.png')
background = cv2.imread('bgr.png')
background_one = cv2.imread('bgr.png')
imgray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
retval, threshold = cv2.threshold(imgray, 20, 255, 0)
contours, hierarchy = cv2.findContours(threshold, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cv2.drawContours(background, contours, -1, (0, 0, 0), 1)
cnt = contours[100]
cv2.drawContours(background_one, [cnt], 0, (0, 255, 0), 3)
area = cv2.contourArea(cnt) # 计算面积
print(area)
cv2.imshow('img', img)
cv2.imshow('threshold', threshold)
cv2.imshow('background', background)
cv2.imshow('background_one', background_one)
cv2.waitKey(0)
cv2.destroyAllWindows()