目标匹配是指在一张图像上选取某个特征进行识别并匹配。
一.单目标匹配
# opencv模板匹配----单目标匹配
import cv2
import matplotlib.pyplot as plt
# 读取目标图片
target = cv2.imread("target.jpg")
# 读取模板图片
template = cv2.imread("template.jpg")
# 获得模板图片的高宽尺寸
theight, twidth = template.shape[:2]
# 执行模板匹配,采用的匹配方式cv2.TM_SQDIFF_NORMED
result = cv2.matchTemplate(target, template, cv2.TM_SQDIFF_NORMED)
# 归一化处理
cv2.normalize(result, result, 0, 1, cv2.NORM_MINMAX, -1)
# 寻找矩阵(一维数组当做向量,用Mat定义)中的最大值和最小值的匹配结果及其位置
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result)
# 匹配值转换为字符串
# 对于cv2.TM_SQDIFF及cv2.TM_SQDIFF_NORMED方法min_val越趋近与0匹配度越好,匹配位置取min_loc
# 对于其他方法max_val越趋近于1匹配度越好,匹配位置取max_loc
strmin_val = str(min_val)
# 绘制矩形边框,将匹配区域标注出来
# min_loc:矩形定点
# (min_loc[0]+twidth,min_loc[1]+theight):矩形的宽高
# (0,0,225):矩形的边框颜色;2:矩形边框宽度
cv2.rectangle(target, min_loc, (min_loc[0]+twidth, min_loc[1]+theight), (0, 0, 225), 2)
# 显示结果,并将匹配值显示在标题栏上
plt.imshow(target)
cv2.imshow("MatchResult----MatchingValue="+strmin_val, target)
plt.show()
cv2.waitKey()
cv2.destroyAllWindows()
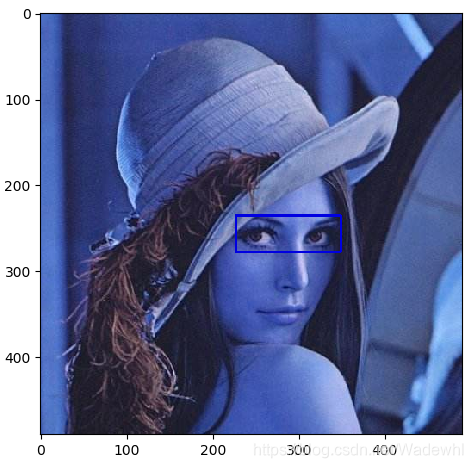
结果展示:
原图与目标模板为:
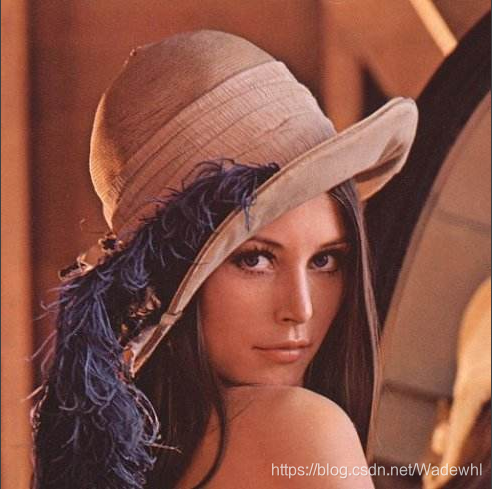
应该是我的matplotlib出现了色差问题导致出来的图像与原图像颜色不一致,用cv2.imshow()函数也可以。
二.多目标匹配
多目标匹配即是选择多幅图像,对同一个目标在多幅图像上进行选择。
# opencv模板匹配----多目标匹配
import cv2
import numpy
import matplotlib.pyplot as plt
# 读取目标图片
target = cv2.imread("mul_target.jpg")
# 读取模板图片
template = cv2.imread("template.jpg")
# 获得模板图片的高宽尺寸
theight, twidth = template.shape[:2]
# 执行模板匹配,采用的匹配方式cv2.TM_SQDIFF_NORMED
result = cv2.matchTemplate(target, template, cv2.TM_SQDIFF_NORMED)
# 归一化处理
# cv2.normalize( result, result, 0, 1, cv2.NORM_MINMAX, -1 )
# 寻找矩阵(一维数组当做向量,用Mat定义)中的最大值和最小值的匹配结果及其位置
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result)
# 绘制矩形边框,将匹配区域标注出来
# min_loc:矩形定点
# (min_loc[0]+twidth,min_loc[1]+theight):矩形的宽高
# (0,0,225):矩形的边框颜色;2:矩形边框宽度
cv2.rectangle(target, min_loc, (min_loc[0]+twidth, min_loc[1]+theight), (0, 0, 225), 2)
# 匹配值转换为字符串
# 对于cv2.TM_SQDIFF及cv2.TM_SQDIFF_NORMED方法min_val越趋近与0匹配度越好,匹配位置取min_loc
# 对于其他方法max_val越趋近于1匹配度越好,匹配位置取max_loc
strmin_val = str(min_val)
# 初始化位置参数
temp_loc = min_loc
other_loc = min_loc
numOfloc = 1
# 第一次筛选----规定匹配阈值,将满足阈值的从result中提取出来
# 对于cv2.TM_SQDIFF及cv2.TM_SQDIFF_NORMED方法设置匹配阈值为0.01
threshold = 0.01
loc = numpy.where(result < threshold)
# 遍历提取出来的位置
for other_loc in zip(*loc[::-1]):
# 第二次筛选----将位置偏移小于5个像素的结果舍去
if (temp_loc[0]+5 < other_loc[0]) or (temp_loc[1]+5 < other_loc[1]):
numOfloc = numOfloc + 1
temp_loc = other_loc
cv2.rectangle(target, other_loc, (other_loc[0]+twidth, other_loc[1]+theight), (0, 0, 225), 2)
str_numOfloc = str(numOfloc)
# 显示结果,并将匹配值显示在标题栏上
strText = "MatchResult----MatchingValue="+strmin_val+"----NumberOfPosition="+str_numOfloc
plt.imshow(target)
plt.show()
cv2.imshow(strText, target)
cv2.waitKey()
cv2.destroyAllWindows()
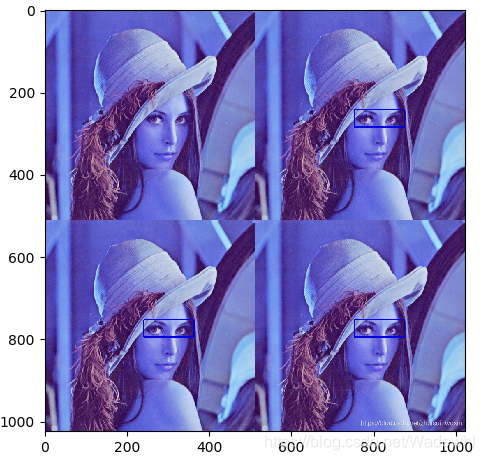
多目标的图像及目标模板为:


结果展示为: