PWM与ADC实验
PWM为什么可以作DAC来使用?
虽然大容量的 STM32F103 具有内部 DAC,但是更多的型号是没有 DAC 的,不过 STM32
所有的芯片都有 PWM 输出,因此,我们可以用 PWM+简单的 RC 滤波来实现 DAC 输出,
从而节省成本。
PWM 本质上其实就是是一种周期一定,而高低电平占空比可调的方波。实际电路的典
型 PWM 波形,如图 26.1.1 所示:
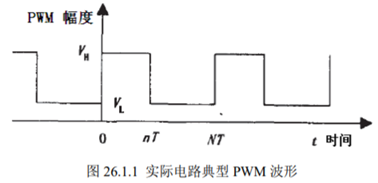
图 26.1.1 的 PWM 波形可以用分段函数表示为式①:

其中:T 是单片机中计数脉冲的基本周期,也就是 STM32 定时器的计数频率的倒数。
N 是 PWM 波一个周期的计数脉冲个数,也就是 STM32 的 ARR-1 的值。n 是 PWM 波一个周期中高电平的计数脉冲个数,也就是 STM32 的 CCRx 的值。VH 和 VL 分别是 PWM 波的高低电平电压值,k 为谐波次数,t 为时间。我们将①式展开成傅里叶级数,得到公式②:
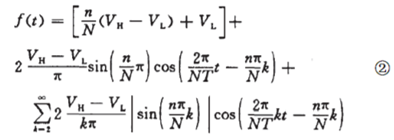
从②式可以看出,式中第 1 个方括弧为直流分量,第 2 项为 1 次谐波分量,第 3 项为大
于 1 次的高次谐波分量。式②中的直流分量与 n 成线性关系,并随着 n 从 0 到 N,直流分量从 VL 到 VL+VH 之间变化。这正是电压输出的 DAC 所需要的。
因此,如果能把式②中除直流分量外的谐波过滤掉,则可以得到从 PWM 波到电压输出 DAC 的转换,即:PWM 波可以通过一个低通滤波器进行解调。式②中的第 2 项的幅度和相角与 n 有关,频率为 1/(NT),其实就是 PWM 的输出频率。该频率是设计低通滤波器的依据。如果能把 1 次谐波很好过滤掉,则高次谐波就应该基本不存在了。
通过上面的了解,我们可以得到 PWM DAC 的分辨率,计算公式如下:分辨率=log2(N)
这里假设 n 的最小变化为 1,当 N=256 的时候,分辨率就是 8 位。而 STM32 的定时器
都是 16 位的,可以很容易得到更高的分辨率,分辨率越高,速度就越慢。不过我们在本章
要设计的 DAC 分辨率为 8 位。也就是 3.3/256=0.01289V。假设 VH 为 3.3V,VL 为 0V,那么一次谐波的最大值是 2*3.3/π=2.1V,这就要求我们的 RC 滤波电路提供至少-20lg(2.1/0.01289)=-44dB 的衰减。
STM32 的定时器最快的计数频率是 72Mhz,8 为分辨率的时候,PWM 频率为72M/256=281.25Khz。如果是 1 阶 RC 滤波,则要求截止频率为 1.77Khz,如果为 2 阶 RC 滤波,则要求截止频率为 22.34Khz。
战舰 STM32 开发板的 PWM DAC 输出采用二阶 RC 滤波,该部分原理图如图 26.1.2 所
示:

二阶 RC 滤波截止频率计算公式为:
f=1/2πRC
以上公式要求 R1=R2=R,C2=C2=C。根据这个公式,我们计算出图 26.1.2 的截止频率
为:33.8Khz 超过了 22.34Khz,这个和我们前面提到的要求有点出入,原因是该电路我们还
需要用作 PWM DAC 音频输出,而音频信号带宽是 22.05Khz,为了让音频信号能够通过该
低通滤波,同时为了标准化参数选取,所以确定了这样的参数。实测精度在 0.5LSB 以内。
为什么用PWM来输出模拟量?
当我们用DAC输出的模拟量精度不够时,我们可以采用PWM输出DAC的方式,因为我们从PWM输出DAC原理得知,PWM经过傅里叶变换后分解为一个常量和一系列谐波,当我么滤掉谐波后,我们得到的是在全周期上都存在的直流电压量,即

引脚简介
| 引脚名称 |
属性 |
功能 |
| PA8 |
TIM1_CH1 |
输出PWM |
| PA4 |
ADC1_CH4 |
进行AD转换读取数字量 |


代码示例
Main.c
#include "pwm.h"
#include "adc.h"
#include "usart.h"
#include "delay.h"
#include "stm32f10x.h"
int main()
{
float temp = 0;
delay_init();
uart_init(115200);
PWM_InitConfig(5000,72); // 初始化TIM1_CH1
ADC_InitConfig(); // 初始化ADC1_CH4
while(1)
{
TIM_SetCompare4(TIM1,2000); // 设置PWM比较值
temp = ADC_GetAverageAnalogValue(); // 获取5次读取ADC值的平均值
printf("ADC:%f",temp); // 使用USART1进行输出
printf("\n");
}
}
Pwm.c
#include "pwm.h"
#include "sys.h"
#include "stm32f10x.h"
void PWM_InitConfig(u32 ARR,u32 PR)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_TIM1,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 切记:一定要是有复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = ARR;
TIM_TimeBaseInitStructure.TIM_Prescaler = PR;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 采用PWM1模式出输出
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 高电平有效
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OC1Init(TIM1,&TIM_OCInitStructure);
TIM_CtrlPWMOutputs(TIM1,ENABLE); // TIM1高级定时器的PWM主输出模式使能
TIM_Cmd(TIM1,ENABLE); // TIM1使能
} Pwm.h
#ifndef _PWM_H
#define _PWM_H
#include "sys.h"
void PWM_InitConfig(u32 ARR,u32 PR);
#endif Adc.c
#include "adc.h"
#include "sys.h"
#include "stm32f10x.h"
void ADC_InitConfig()
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1|RCC_APB2Periph_GPIOA,ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
ADC_DeInit(ADC1);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_Init(ADC1,&ADC_InitStructure);
ADC_Cmd(ADC1,ENABLE);
ADC_ResetCalibration(ADC1); // 开始ADC1校准功能复位
while(ADC_GetResetCalibrationStatus(ADC1) == SET); // 轮询等待结束
ADC_GetCalibrationStatus(ADC1); // 使能ADC1校准功能
while(ADC_GetCalibrationStatus(ADC1) == SET); // 轮询等待结束
}
float ADC_GetSingleAnalogValue()
{
float temp = 0;
ADC_RegularChannelConfig(ADC1,ADC_Channel_4,1,ADC_SampleTime_28Cycles5); // 配置ADC1_CH4规则通道的采样周期与采样优先级
ADC_SoftwareStartConvCmd(ADC1,ENABLE); // 开始AD转换
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC) == RESET); // 轮询等待结束
temp = ADC_GetConversionValue(ADC1); // 获得采样值
temp /= 4096.0;
temp *= 3.3;
return temp;
}
float ADC_GetAverageAnalogValue()
{
float temp = 0;
u8 times = 0;
for(;times<5;times++)
{
temp += ADC_GetSingleAnalogValue();
}
temp /= 5;
return temp;
} Adc.h
#ifndef _ADC_H
#define _ADC_H
void ADC_InitConfig(); // ADC初始化
float ADC_GetSingleAnalogValue(); // 对AD转换值采样一次
float ADC_GetAverageAnalogValue(); // 对AD转换值采样多次取平均值
#endif 代码运行结果
