STM32裸机开发(5) — 在Keil-MDK下编写uart串口打印程序
一、构建程序目录
新建src文件夹,用来存放c源代码
新建inc文件夹,用来存放头文件
二、编写源文件
在src文件夹下新建uart.c文件如下所示
#include "uart.h"
typedef unsigned int uint32_t;
typedef struct
{
volatile uint32_t SR; /*!< USART Status register, Address offset: 0x00 */
volatile uint32_t DR; /*!< USART Data register, Address offset: 0x04 */
volatile uint32_t BRR; /*!< USART Baud rate register, Address offset: 0x08 */
volatile uint32_t CR1; /*!< USART Control register 1, Address offset: 0x0C */
volatile uint32_t CR2; /*!< USART Control register 2, Address offset: 0x10 */
volatile uint32_t CR3; /*!< USART Control register 3, Address offset: 0x14 */
volatile uint32_t GTPR; /*!< USART Guard time and prescaler register, Address offset: 0x18 */
} USART_TypeDef;
void uart_init(void)
{
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
volatile unsigned int *pReg;
/* 使能GPIOA/USART1模块 */
/* RCC_APB2ENR */
pReg = (volatile unsigned int *)(0x40021000 + 0x18);
*pReg |= (1<<2) | (1<<14);
/* 配置引脚功能: PA9(USART1_TX), PA10(USART1_RX)
* GPIOA_CRH = 0x40010800 + 0x04
*/
pReg = (volatile unsigned int *)(0x40010800 + 0x04);
/* PA9(USART1_TX) */
*pReg &= ~((3<<4) | (3<<6));
*pReg |= (1<<4) | (2<<6); /* Output mode, max speed 10 MHz; Alternate function output Push-pull */
/* PA10(USART1_RX) */
*pReg &= ~((3<<8) | (3<<10));
*pReg |= (0<<8) | (1<<10); /* Input mode (reset state); Floating input (reset state) */
/* 设置波特率
* 115200 = 8000000/16/USARTDIV
* USARTDIV = 4.34
* DIV_Mantissa = 4
* DIV_Fraction / 16 = 0.34
* DIV_Fraction = 16*0.34 = 5
* 真实波特率:
* DIV_Fraction / 16 = 5/16=0.3125
* USARTDIV = DIV_Mantissa + DIV_Fraction / 16 = 4.3125
* baudrate = 8000000/16/4.3125 = 115942
*/
#define DIV_Mantissa 4
#define DIV_Fraction 5
usart1->BRR = (DIV_Mantissa<<4) | (DIV_Fraction);
/* 设置数据格式: 8n1 */
usart1->CR1 = (1<<13) | (0<<12) | (0<<10) | (1<<3) | (1<<2);
usart1->CR2 &= ~(3<<12);
/* 使能USART1 */
}
int getchar(void)
{
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
while ((usart1->SR & (1<<5)) == 0);
return usart1->DR;
}
int putchar(char c)
{
USART_TypeDef *usart1 = (USART_TypeDef *)0x40013800;
while ((usart1->SR & (1<<7)) == 0);
usart1->DR = c;
return c;
}
在inc文件夹下新建uart.h内容如下
#ifndef _UART_H
#define _UART_H
void uart_init(void);
int getchar(void);
int putchar(char c);
#endif
在src文件夹下新建led.c文件如下所示
#include "led.h"
int delay(int ndelay)
{
volatile int n = ndelay;
while(n--);
return 0;
}
void led_init(void)
{
unsigned int *pReg;
/* 1、使能GPIOB */
pReg = (unsigned int *)(0x40021000 + 0x18);
*pReg |= (1<<3);
/* 2、设置GPIOB5为输出引脚 */
pReg = (unsigned int *)(0x40010C00 + 0x00);
*pReg |= (1<<20);
pReg = (unsigned int *)(0x40010C00 + 0x0C);
*pReg &= ~(1<<5);
}
void led_on(void)
{
unsigned int *pReg = (unsigned int *)(0x40010C00 + 0x0C);
/* 设置GPIOB5输出0 */
*pReg &= ~(1<<5);
}
void led_off(void)
{
unsigned int *pReg = (unsigned int *)(0x40010C00 + 0x0C);
/* 设置GPIOB5输出1 */
*pReg |= (1<<5);
}
在inc文件夹下新建led.h内容如下
#ifndef __LED_H
#define __LED_H
int delay(int ndelay);
void led_init(void);
void led_on(void);
void led_off(void);
#endif
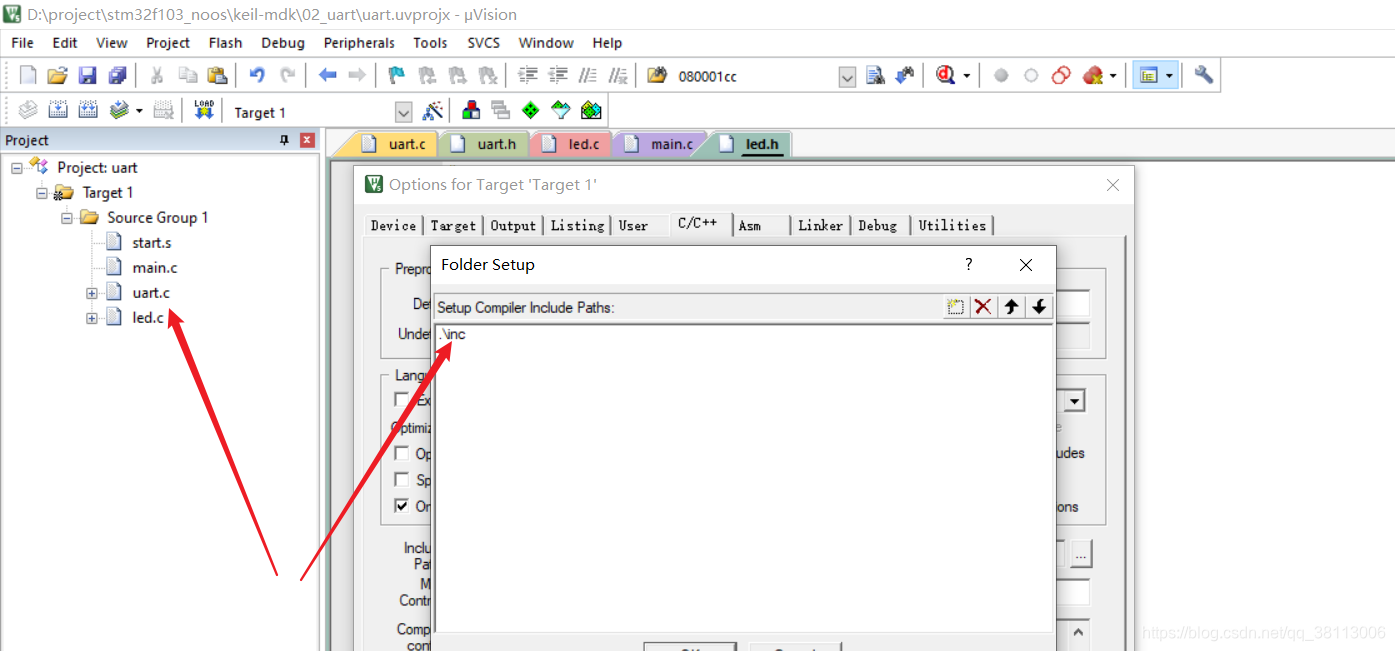
然后将led.c、uart.c添加到工程中,并添加inc文件夹为头文件目录
三、修改主函数
将了原来的led.c修改为main.c如下所示
#include "uart.h"
#include "led.h"
int main(void)
{
uart_init();
led_init();
putchar('s');
putchar('t');
putchar('m');
putchar('3');
putchar('2');
putchar('f');
putchar('1');
putchar('0');
putchar('3');
putchar('\r');
putchar('\n');
while(1)
{
led_on();
delay(1000000);
led_off();
delay(1000000);
}
}
四、编写汇编程序
汇编程序start.s修改为如下所示
Stack_Size EQU 0x00000400 ;定义堆栈大小为1024byte
AREA STACK, NOINIT, READWRITE, ALIGN=3 ;定义一个数据段,标记为STACK,即栈,不写入初始值初,对RAM来说,即初始化为0,8字节对齐
Stack_Mem SPACE Stack_Size ;保留Stack_Size大小的栈空间
__initial_sp ;标号,代表堆栈顶部地址,后面有用
PRESERVE8 ;指示编译器8字节对齐
THUMB ;指示编译器以后的指令为THUMB指令
; Vector Table Mapped to Address 0 at Reset
AREA RESET, CODE, READONLY ;定义只读数据段,标记为RESET,其实放在CODE区,位于0地址
EXPORT __Vectors ;在程序中声明一个全局的标号__Vectors,该标号可在其他的文件中引用
__Vectors DCD __initial_sp ;当前地址写入一个字(32bit)数据,值应该为栈顶地址
DCD Reset_Handler ;当前地址写入一个字(32bit)数据,值为Reset_Handler指向的地址值,即程序入口地址
AREA |.text|, CODE, READONLY ;定义代码段,标记为.text
; Reset handler ;利用PROC、ENDP这一对伪指令把程序段分为若干个过程,使程序的结构加清晰
Reset_Handler PROC ;过程的开始
EXPORT Reset_Handler [WEAK] ;[WEAK] 弱定义,意思是如果在别处也定义该标号(函数),在链接时用别处的地址。
IMPORT main ;通知编译器要使用的标号在其他文件
BL main ;跳转去执行main函数
B . ;原地跳转,即处于循环状态
ENDP
ALIGN ;填充字节使地址对齐
END ;整个汇编文件结束
五、运行
编译烧录运行可以看到其打印的信息
六、优化
接下来我们在uart.c中添加如下两个函数用来打印字符串和16进制数
int putstring(const char *s)
{
while (*s)
{
putchar(*s);
s++;
}
return 0;
}
void puthex(unsigned int val)
{
/* 0x76543210 */
int i, j;
//puts("0x");
putchar('0');
putchar('x');
for (i = 7; i >= 0; i--)
{
j = (val >> (i*4)) & 0xf;
if ((j >= 0) && (j <= 9))
putchar('0' + j);
else
putchar('A' + j - 0xA);
}
}
修改main函数如下所示
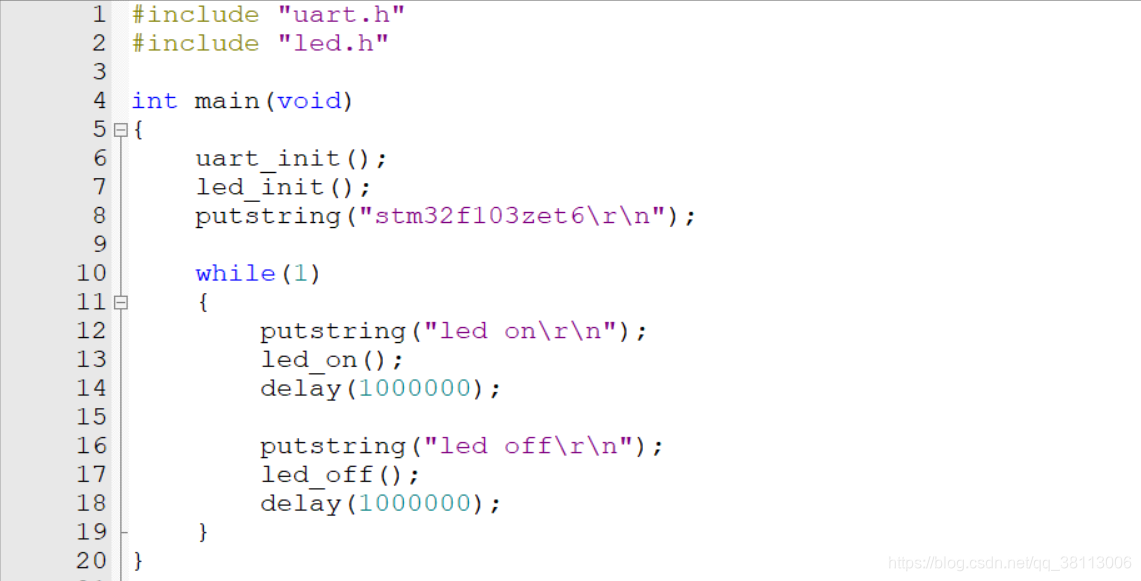
扫描二维码关注公众号,回复:
12258173 查看本文章

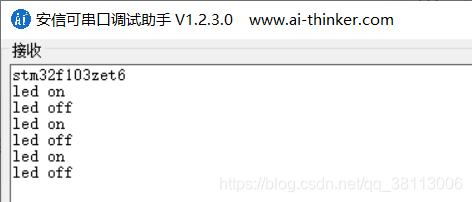
编译烧录运行可以看到其串口打印如下
七、附录
上一篇:STM32裸机开发(4) — 编写C语言点亮LED灯
下一篇:STM32裸机开发(6) — Keil-MDK下散列文件的分析
代码存放:https://gitee.com/william_william/stm32f103_noos/tree/master/keil-mdk/02_uart