1. 维特比算法
1.1 前提概要
我们知道HMM需要解决三个问题,其中的decoding问题需要用维特比算法,那么什么是维特比呢?维特比算法是一种动态规划算法,在学xgboost的时候我们使用了一个技巧,t+1时刻的预测值为t时刻的预测值加上t+1时刻的预测值。维特比有点相似。
先来回顾下,维特比解决的什么问题,已知观测序列和参数,求隐藏序列。注意重点是求隐藏序列,所以问题的本质是找到隐藏序列。
举个例子:盒子和球模型(来自小蓝书),已知如下:
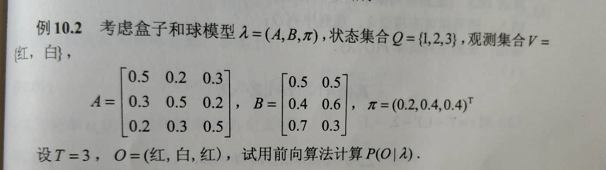
我们知道观测序列为{红,白},求的是隐藏序列(来自哪个盒子),可能的结果为{1,1}、{1,2}、{1,3}、{2,1}、{2,2}、{2,3}、{3,1}、{3,2}、{3,3},问题的本质是求这9种可能哪个概率最大,概率最大的那个就是我们的答案。将所有可能的结果呈现在二维图中:
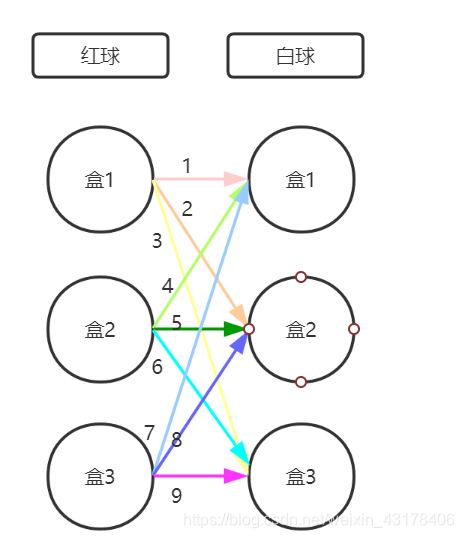
对上图进行阐释:在已知第一次为红色时,可以选择第1、第2、第3个盒子;第二次为白色亦同。由此从第一次红色到第二次白色就有9条路径可以选择。
假如第一次和第二次结果对应的盒子分别是盒子1和盒子2,也就是说选择了路径2。那么我们如果确保图中的路径2概率最大呢?
从第二次结果考虑,只要从开始到第一次结果选择的路径正确,且从第一次结果到第二次结果的转移正确(即第二次正确选择了盒子2),就能保证我们整个路径正确。
广泛地讲:只要从开始到第t次结果选择的路径是正确的,且第t+1时刻正确选择(t时刻到t+1时刻转移正确)就能保证直到t+1时刻我们的选择都是对的,得到的答案就是最优答案。此外t时刻的结果又和t-1时刻的正确路径有关,因此可以一直向前推,就是维特比算法的思想。
还是以上图中的小蓝书为例。直接通过例子感受维特比算法的过程。
1.2 实例计算1
我们从最终的t=2时刻开始看
- t=2时刻的概率记做 δ 2 \delta_2 δ2依赖于三部分:
- 一:t=1时刻的概率 δ 1 \delta_1 δ1
- 二:t=1时刻从状态j转移到状态i的概率,即转移矩阵中的 a j i a_{ji} aji
- 三:t=2时刻状态为i(盒子为i),观测 o 2 o_2 o2为白的概率,其实就是B中的 b i ( k = o 2 ) b_i(k=o_2) bi(k=o2),即发射矩阵中的 b i ( o 2 ) b_i(o_2) bi(o2)
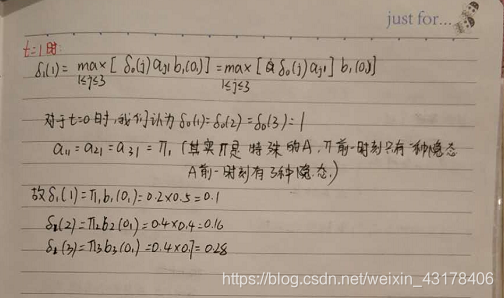
- t=1时刻的概率记做 δ 1 \delta_1 δ1依赖于三部分:
- 一:t=0时刻的概率 δ 0 = 1 \delta_0=1 δ0=1
- 二:t=0时刻从状态j(对于t=0时刻,只有状态0)转移到状态i的概率,即π中的 π i \pi_i πi
- 三:t=1时刻状态为i(盒子为i),观测 o 1 o_1 o1为红的概率,其实就是B中的 b i ( k = o 1 ) b_i(k=o_1) bi(k=o1),即发射矩阵中的 b i ( o 2 ) b_i(o_2) bi(o2)
上述介绍了计算的组成部分,或者说大致思想,但是具体怎么算呢,下面将会仔细讲解。
- t=2时:
- 一: δ 1 \delta_1 δ1,该值是什么,我们先放下,继续看第二、第三部分
- 二:t=1时刻从隐藏状态j转移到隐藏状态i的概率,我们知道t=1时刻的隐藏状态j有三种(j为盒子1,盒子2,盒子3),同时t=2时的隐藏状态i(i为盒子1,盒子2,盒子3)有三种情况,也就是说第二部分可以计算出九个取值
- 三:t=2时刻状态为i(盒子为i),观测 o 2 o_2 o2为白的概率,其实就是B中的 b i ( k = o 2 ) b_i(k=o_2) bi(k=o2),即发射矩阵中的 b i ( o 2 ) b_i(o_2) bi(o2),i有三种情况,故有三个取值
- 二有9种取值,三有三种取值,因此我们可以根据三中的i将二也分成三大类(每个大类包含三个小类)
- 综上,我们可以得到 δ 2 ( i ) = δ 1 ( j ) a j 1 b 1 ( o 2 ) , i = 1 , 2 , 3 ; j = 1 , 2 , 3 \delta_2(i)=\delta_1(j)a_{j1}b_1(o_2), i=1,2,3;j=1,2,3 δ2(i)=δ1(j)aj1b1(o2),i=1,2,3;j=1,2,3。具体来讲,得到的三个取值为 δ 2 ( 1 ) = δ 1 ( j ) a j 1 b 1 ( o 2 ) , j = 1 , 2 , 3 \delta_2(1)=\delta_1(j)a_{j1}b_1(o_2), j=1,2,3 δ2(1)=δ1(j)aj1b1(o2),j=1,2,3 δ 2 ( 2 ) = δ 1 ( j ) a j 2 b 1 ( o 2 ) , j = 1 , 2 , 3 \delta_2(2)=\delta_1(j)a_{j2}b_1(o_2), j=1,2,3 δ2(2)=δ1(j)aj2b1(o2),j=1,2,3 δ 2 ( 3 ) = δ 1 ( j ) a j 3 b 1 ( o 2 ) , j = 1 , 2 , 3 \delta_2(3)=\delta_1(j)a_{j3}b_1(o_2), j=1,2,3 δ2(3)=δ1(j)aj3b1(o2),j=1,2,3
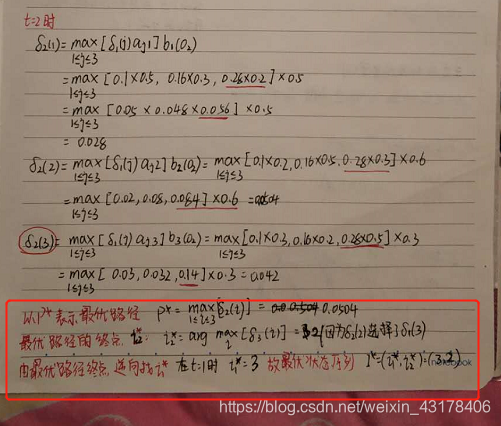
- 对于t=2时刻,隐藏状态就是 δ 2 ( 1 ) , δ 2 ( 2 ) , δ 2 ( 3 ) \delta_2(1),\delta_2(2),\delta_2(3) δ2(1),δ2(2),δ2(3)三个数中最大那个数对应的隐藏状态,记做 i 2 ∗ i_2^* i2∗(最终的隐藏序列 I ∗ = ( i 1 ∗ , i 2 ∗ ) I^*=(i_1^*,i_2^*) I∗=(i1∗,i2∗)),(ps:对于t=2时刻,选择哪个隐藏状态呢,那就分别计算三种隐藏状态的概率吧,选择概率最大的那个)假如\delta_2(3)最大,那么第二步的隐藏状态就是3,然而还有一个问题,因为j有三种取值,故\delta_2(3)也有三种取值,那么\delta_2(3)到底是什么呢?其实也是这三种结果中的最大的那个。
- 综上所述,可以得到两个结论, i 2 ∗ = a r g max 1 ≤ i ≤ 3 ( δ 2 ( i ) ) 公 式 1 i_2^*=arg\max\limits_{1\le i\le3}(\delta_2(i))公式1 i2∗=arg1≤i≤3max(δ2(i))公式1 δ 2 ( i ) = max 1 ≤ j ≤ 3 δ 1 ( j ) a j i b i ( o 2 ) 公 式 2 \delta_2(i)=\max\limits_{1\le j\le3}\delta_1(j)a_{ji}b_i(o_2)公式2 δ2(i)=1≤j≤3maxδ1(j)ajibi(o2)公式2对于其他时刻,公式2依旧成立,公式1只有在最后一个时刻才用得到。不过也看到一个事实,t=2时刻的结果不能立马算出来,因为他还取决于t=1时刻,因此,计算时,我们要先从t=1时刻开始算。下面就讲如何计算
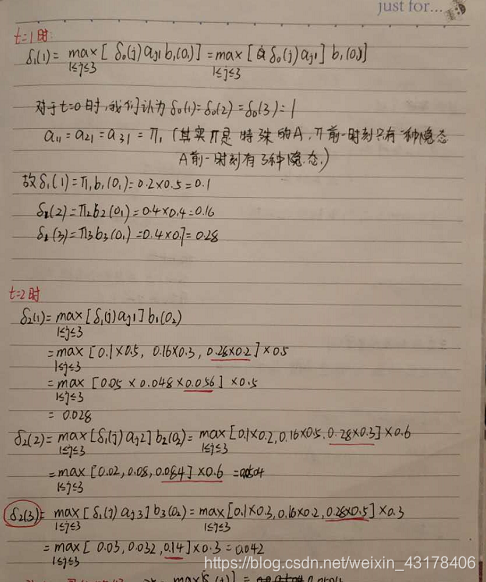
1.3 实例计算2
上文中小蓝书A,B,π不变,但是观测序列变为{红,白,红},计算过程如下:

1.4 公式总结
第2章和第3章我们使用了实例讲解维特比算法的求解过程,现在将上述过程总结为公式。
- 输入:模型 λ = ( A , B , π ) \lambda=(A,B,\pi) λ=(A,B,π)和观测 O = ( o 1 , o 2 , . . . , o T ) O=(o_1,o_2,...,o_T) O=(o1,o2,...,oT)
- 输出:最优路径 I ∗ = ( i 1 ∗ , i 2 ∗ , . . . i T ∗ ) I^*=(i_1^*,i_2^*,...i_T^*) I∗=(i1∗,i2∗,...iT∗)
- 初始化: δ ( i ) = π i b i ( o i ) \delta(i)=\pi_ib_i(o_i) δ(i)=πibi(oi) ψ ( i ) = 0 \psi(i)=0 ψ(i)=0
- 递推,对于t=2,3,…T δ t ( i ) = max 1 ≤ j ≤ N [ δ t − 1 ( j ) a j i ] b i ( o t ) , 其 中 N 指 隐 藏 状 态 的 个 数 \delta_t(i) = \max\limits_{1\le j\le N}[\delta_{t-1}(j)a_{ji}]b_i(o_t),其中N指隐藏状态的个数 δt(i)=1≤j≤Nmax[δt−1(j)aji]bi(ot),其中N指隐藏状态的个数 ψ t ( i ) = a r g max 1 ≤ j ≤ N [ δ t − 1 ( j ) a j i ] \psi_t(i) = arg \max\limits_{1\le j\le N}[\delta_{t-1}(j)a_{ji}] ψt(i)=arg1≤j≤Nmax[δt−1(j)aji]
- 终止 P ∗ = max 1 ≤ i ≤ N δ T ( i ) P^* = \max\limits_{1\le i\le N}\delta_T(i) P∗=1≤i≤NmaxδT(i) i T ∗ = a r g max 1 ≤ i ≤ N δ T ( i ) i_T^*=arg\max\limits_{1\le i\le N}\delta_T(i) iT∗=arg1≤i≤NmaxδT(i)
- 最终路径回溯对于t=T-1,T-2,…1 i t ∗ = ψ t + 1 ( i t + 1 ∗ ) i_t^*=\psi_{t+1}(i_{t+1}^*) it∗=ψt+1(it+1∗)求得最优路径 I ∗ = ( i 1 ∗ , i 2 ∗ , . . . i T ∗ ) I^*=(i_1^*,i_2^*,...i_T^*) I∗=(i1∗,i2∗,...iT∗)
ps:由于例子中没有提到 ψ ( i ) \psi(i) ψ(i),先说明一下: ψ t ( i ) = a r g max 1 ≤ j ≤ N [ δ t − 1 ( j ) a j i ] \psi_t(i) = arg \max\limits_{1\le j\le N}[\delta_{t-1}(j)a_{ji}] ψt(i)=arg1≤j≤Nmax[δt−1(j)aji]其实就是t时刻,隐态为i时,t-1时刻选择的隐藏状态,很有可能就是最终的 i t − 1 ∗ i_{t-1}^* it−1∗,为什么是很有可能,因为t时刻,隐态为i时, δ t ( i ) \delta_t(i) δt(i)不一定是最大的。
1.5 ps
ps:上述文字部分在表述上可能有所问题,但是是为了理解,其中图片的计算部分,以及第4章公式总结部分是正确的
2. 近似算法
理解了维特比算法,再来看近似算法的公式,可能就比较容易理解了,再此不再展开来讲,附上小蓝书关于近似算法的描述:
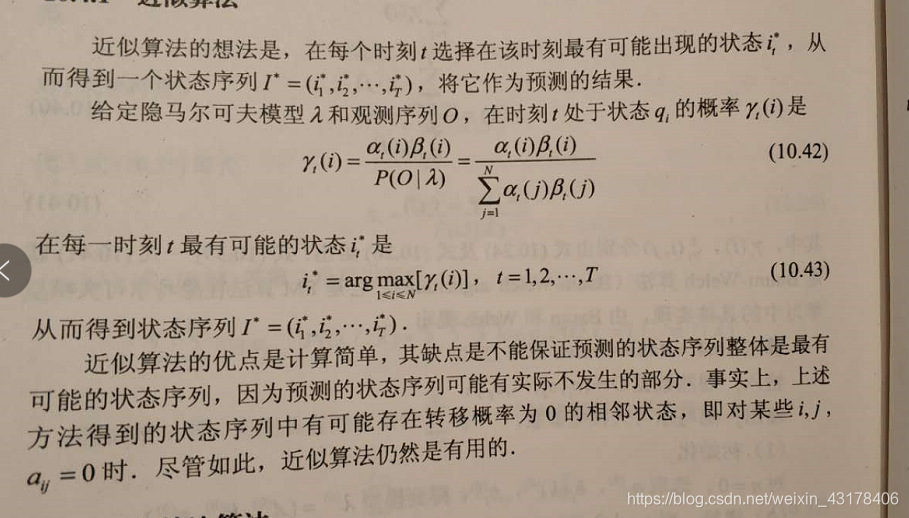
其中 α 和 β \alpha和\beta α和β是前后向算法中引入的变量,具体可见HMM原理3:前后向算法