Elasticsearch原理分析——集群启动流程
文章目录
让我们从启动流程开始,先在宏观上看看整个集群是如何启动的,集群状态如何从Red变成Green,不涉及代码,然后分析其他模块的流程。
本书中,集群启动过程指集群完全启重启的启动过程,期间要经历选举主节点、分片分配(主副分片的分配)、索引数据恢复等重要阶段,理解其中原理和细节,对于解决或避免集群维护过程中可能遇到的脑裂、无主、恢复慢、丢数据等问题有重要作用。
集群启动的整体流程如下图所示:
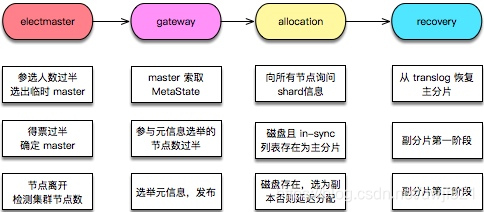
1. 选举主节点
假设有若干个节点正在启动,集群启动的第一件事是从已知的活跃机器列表选择一个作为主节点,选主之后的流程由主节点触发。
ES的选主算法是基于Bully算法的改进,主要思路是对节点ID排序,取ID值最大的节点作为Master,每个节点都运行这个流程。是不是非常简单?选主的目的是确定唯一的主节点,初学者可能认为选举出的主节点应该持有最新的元数据信息,实际上这个问题在实现上被分解为两步:先确定唯一的、大家公认的主节点,再想办法把最新的机器元数据复制到选举出来的主节点上。
基于节点ID排序的简单选举算法有三个附加约定条件:
-
参选人数需要过半,达到quorum(多数)后选出临时的主。
为什么是临时的?每个节点运行排序取最大值的算法,结果不一定相同。举个例子,集群有5台主机,节点ID分别是1、2、3、4、5。当产生网络分区或节点启动速度差异比较大时,节点1看到的节点列表是1、2、3、4,选出4;节点2看到的节点列表是2、3、4、5,选出5。结果就不一致了,由此产生下面的第二条限制。
-
得票数需过半。
某节点被选为主节点,必须判断加入它的节点数过半,才确认Master身份。解决第一个问题。
-
当探测到节点离开事件时,必须判断当前节点数是否过半。
如果达不到quorm,则放弃Master身份,重新加入集群。如果不这么做,则设想以下情况:假设5台机器组成的集群产生网络分区,2台一组A,3台一组B。产生分区前,Master位于2台中的A,此时3台一组的节点会重新成功选举Master,产生双主,俗称脑裂。
集群并不知道自己有多少个节点,quornum值从配置中读取,我们需要设置配置项:
discovery.zen.minimun_master_nodes: 3
2. 选举集群元信息
被选举出的Master和集群元信息的新旧程度没有关系。因为它的第一个任务是选举元信息,让各个节点把各自存储的元信息发过来,根据版本号确定最新的元信息,然后把这个信息广播下去,这个集群的所有节点都有了最新的元信息。
集群的元信息的选举包括两个级别:集群级和索引级。不包含shard存储于哪个节点的信息。这种信息以节点磁盘存储的为准,需要上报。为什么呢?因为读写流程是不经过Master的,Master不知道各shard副本直接的数据差异。HDFS也有类似的机制,block信息依赖于DataNode的上报。
为了集群一致性,参与选举的元信息数量需要过半,Master发布集群状态成功的规则也是等待发布成功的节点数过半。
在选举过程中,不接受新节点的加入请求。
集群元信息选举完毕后,Master发布首次集群状态,然后开始选举shard级元信息。
3. shard allocation(分配)过程
选举shard级元信息,构建内容路由表,是在allocation模块完成的。在初始阶段,所有的shard都处于**UNASSIGNED(unassigned 未分配)**状态。ES中通过分配过程决定哪个分片位于哪个节点,重构内容路由表。此时,首先要做的就是分配主分片。
3.1 选主分片
现在看某个主分片【website】【0】是怎么分配的。所有的分配工作都是Master来做的,此时,Master不知道主分片在哪,它向集群的所有节点询问:大家把【website】【0】分片的元信息发我。然后,Master等待所有的请求返回,正常情况下它就有了这个shard的信息,然后根据某种策略选一个分片作为主分片。是不是效率有些低?这种询问量=shard数 * 节点数。所以说我们最好控制shard的总规模别太大。
现在有了shard【website】【0】的分片的多份信息,具体数量取决于副本数设置了多少。现在考虑把哪个分片作为主分片。ES 5.x以下的版本,通过对比shard级元信息的版本号来决定。在多副本的情况下,考虑到如果只有一个shard信息汇报上来,则它一定会被选为主分片,但也许数据不是最新的,版本号比它大的节点还没有启动。在解决这个问题的时候,ES 5.x开始实施一种新的策略:给每个shard都设置一个UUID,然后在集群级的元信息中记录哪个shard是最新的,因为ES是先写主分片,再由主分片节点转发请求去写副本分片,所以主分片所在节点肯定是最新的,如果它转发失败了,则要求Master删除那个节点。所以,从ES 5.x开始,主分片选举过程是通过集群元信息中记录的“最新主分片的列表”来确定主分片的:汇报信息中存在,并且这个列表中也存在。
如果集群设置了:
cluster.routing.allocation.enable: none
禁止分配分片,集群仍然会强制分配主分片。因此,在设置了上述选项的情况下,集群重启后的状态为Yellow,而非Red。
3.2 选副分片
主分片选举成功后,从上一个过程汇总的shard信息中选择一个副本最为副分片。如果汇总信息中不存在,则分配一个全新副本。操作依赖于延迟配置项:
indexunassigned.node_left.delayed_timeout: 100000
我们的线上环境中最大的集群有100+节点,掉节点的情况并不罕见,很多时候不能第一时间处理,这个延迟我们一般配置为以天为单位。
最后,allocation过程中允许新启动的节点加入集群。
4. index recovery(索引恢复)
分片分配成功后进入recovery流程。主分片的recovery不会等待其副本分片分配成功后才开始recovery。它们是独立的流程,只是副本分片的recovery需要主分片恢复完毕才开始。
为什么需要recovery?对于主分片来说,可能有一些数据没来得及刷盘;对于副本分片来说:一是没有刷盘,二是主分片写完了,副本分片还没有来得及写,主副分片数据不一致。
4.1 主分片recovery
由于每次写操作都会记录事务日志(translog),事务日志中记录了哪种操作,以及相关的数据。因此将最后一次提交(Lucene的一次提交就是一次fsync刷盘过程)之后的translog进行重放,建立Lucene索引,如此完成主分片的recovery。
4.2 副分片recovery
副分片的恢复是比较复杂的,在ES的版本迭代中,副分片恢复策略有过不少调整。
副分片需要恢复成和主分片一致,同时,恢复期间允许新的索引操作。目前的6.0版本中,恢复分成两阶段执行。
-
phase1:在主分片所在节点,获取translog保留锁,从获取保留锁开始,会保留translog不受其刷盘清空的影响。然后调用Lucene接口把shard做快照,这是已经刷磁盘中的分片数据。把这些shard数据复制到副本节点。在phase1完毕前,会向副分片节点发生告知对方启动engine,在phase2开始之前,副本分片就可以正常处理写请求了。
-
phase2:对tanslog做快照,这个快照里包含从phase1开始,到执行translog快照期间的新增索引。将这些translog发送到副本分片所在节点进行重放。
由于需要支持恢复期间的新增写操作(让ES的可用性更强),这两个阶段中需要重点关注以下几个问题:
- 分片数据完整性:如何做到副本分片不丢失数据?第二阶段的tanslog快照包括第一阶段所有的新增操作。那么第一阶段执行期间如果发生**“Lucene commit”(将文件系统写缓冲中的数据刷磁盘,并清空translog),清除translog怎么办?在ES 2.0之前,是阻止刷新操作,以此让translog都保留下来。从2.0版本开始,为了避免这种做法产生过大的translog,引入了translog.view的概念,创建view可以获取后续的所有操作。从6.0版本开始,translog.veiw被移除。引入TranslogDetetionPolicy的概念**,它将translog做一个快照来保持translog不被清理。这样实现了在第一阶段允许Lucene Commit。
- 数据一致性:在ES 2.0之前,副分片恢复过程有三个阶段,第三阶段会阻塞新的索引操作,传输第二阶段期间新增的translog,这个时间很短。自2.0版本之后,第三阶段被删除,恢复期间没有任何写阻塞过程。在副分片节点,重放translog时,phase1和phase2之间的写操作与phase2重放操作之间的时序错误和冲突,通过写流程进行异常处理,对比版本号来来过滤过期操作。
这样,时序上存在错误的操作会被忽略,对于特定的doc,只有最新一次操作生效,保证了主副分片一致。
第一阶段尤其漫长,因为它需要从主分片拉去全量的数据。在ES 6.x中,对第一阶段再次优化:标记每个操作。在正常的写操作中,每次写入成功的操作都分配一个序号,通过对比序号就可以计算出差异范围,在实现方式上,添加了global checkpoint和local checkpoint,主分片负责维护global checkpoint,代表所有分片都已经写入这个序号的位置,local checkpoint代表当前分片已经成功写入的最新位置,恢复时通过对比两个序列号,计算出缺失的数据范围,然后通过translog重放这部分数据,同时translog会为此保留更长的时间。
因此,有两个机会可以跳过副分片恢复的phase1:
- 基于SequenceNumber,从主分片节点的translog恢复数据
- 主副分片有相同的syncid且doc数相同,可以跳过phase1。
5. 小结
当一个索引的主分片分配成功后,到此分片的写操作是允许的。当一个索引所有的主分片都分配成功后,该索引变为Yellow。当全部索引的主分片都分配成功后,整个集群变为Yellow。当一个索引全部分配分配成功后,该索引变为Green。当全部索引的索引分片分配成功后,整个集群变为Green。
索引数据恢复是最漫长的过程。当shard总量达到十万级别的时候,6.x之前的版本集群从Red变为Green的时间可能需要小时级。ES 6.X中的副本允许从本地translog恢复是一次重大的改进,避免了ongoing主分片所在的节点拉取全量数据,为恢复过程节约了大量的时间。
量达到十万级别的时候,6.x之前的版本集群从Red变为Green的时间可能需要小时级。ES 6.X中的副本允许从本地translog恢复是一次重大的改进,避免了ongoing主分片所在的节点拉取全量数据,为恢复过程节约了大量的时间。
6. 关注我
搜索微信公众号:java架构强者之路