本文为视觉 SLAM 学习总结,总结 4 个坐标系变换的关系。
在视觉 SLAM 中,我们引入了 4 个坐标系,通过不同坐标系观测到同一个点会得到不同的坐标位置,并且存在一定的关系。
- 世界坐标系
PW(m):
(xw,yw,zw)。一般取相机的初始位置或特殊位置。
- 相机坐标系
PC(m):
(xc,yc,zc)。以相机光心为原点,见下图
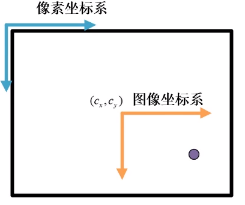
- 图像坐标系
P(mm):
(x,y)。在物理成像平面上,以成像平面中心为原点
- 像素坐标系
p (pixel):
(u,v)。在成像平面上,以成像平面左上角为原点

我们有 4 个不同的坐标系,则坐标系之间就需要 3 个变换,我们接下来一一进行讲解:
世界坐标系到相机坐标系(
PW→PC)
世界坐标系与相机坐标系之间仅相差一个旋转和一个平移,我们将图像中的坐标系旋转到与世界坐标系相同的方向,再将两个原点通过平移重合到一起即可完成变换。详细过程见【三维空间刚体运动】。

相机坐标系到图像坐标系(
PC→P)
这部分的原理为小孔成像。
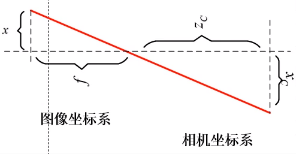
在相机坐标系中是三维坐标,投影到成像平面变为二维坐标,丢失的一个维度为焦距。其变换关系为:
fzc=xxc=yyc
图像坐标系到像素坐标系(
P→p)
像素坐标系与图像坐标系的原点相差一个平移,但是两个坐标系的单位不同,还需要一个比例缩放。变换关系为:
u=αx+cx
v=βy+cy
然后我们就可以将这三个变换联立
相机坐标系到像素坐标系
首先从图像坐标系和相机坐标系间的变换关系中解出
x,y,然后代入图像坐标系到像素坐标系的变换:
u=αfzcxc+cx
v=βfzcyc+cy
写成矩阵形式:
⎝⎛uv1⎠⎞=zc1⎝⎛fx000fy0cxcy1⎠⎞⎝⎛xcyczc⎠⎞=zc1KPC=p
当然齐次坐标中的
zc 可以省略,省略后可以表示为
p=KPC。
世界坐标系到像素坐标系
这一步更加简单,只需要将
PC 替换即可:
p=⎝⎛uv1⎠⎞=zc1⎝⎛fx000fy0cxcy1⎠⎞⎝⎛xcyczc⎠⎞=zc1KTPW