本文只是从一般的图像处理角度来看待Markov模型,并未从图模型的角度入手,主要参考《Markov.Random.Field.Modeling.In.Image.Analysis》一书。
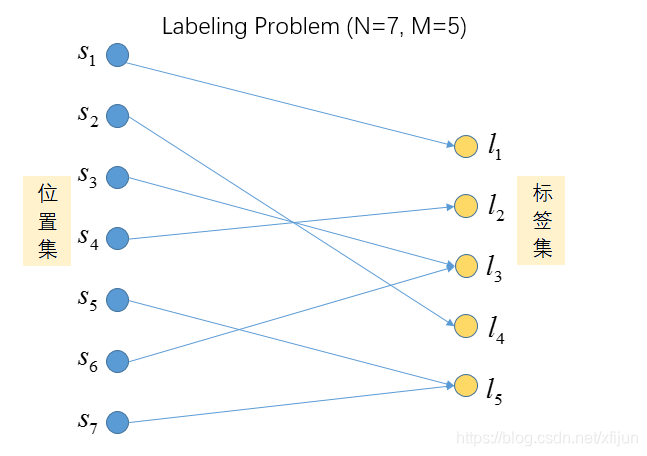
1. 贴标签问题(Labeling problem)
给定一系列的位置
(site) 和一系列的标签
(label),贴标签问题
(Labeling Problem)是指,为每个地点贴上一个标签。
- 假设
S={s1,⋯,sn,⋯,sN} 表示具有
N 个位置的离散位置集
(discrete site set),
L={l1,⋯,lm,⋯,lM} 表示具有
M 个标签的离散标签集
(discrete label set)
- 对于位置集
S 中的任意一个位置
sn,都可以从标签集
L 中选择一个标签
lm、给位置
sn “贴上一个标签”
(labeling)
例如,对于一幅
N×N 大小的灰度图像而言:
(1) “位置集” 可表示为
S={(i,j) ∣ ∀ i,j∈{1,2,⋯,N} }
(2) “标签集” 可表示为
L={l ∣ 0,1,⋯,255}
因此,贴标签问题相当于定义了一个映射
φ:
φ:S→L
φ(i,j)=l 或
φ(sn)=lm
显然,对于一副
N×N 大小的灰度图像,任意
(i,j) 处像素的灰度值都可能是标签集
L 中元素
0∼255 中的一个(即:任一位置像素的灰度值具有
256 种可能),对整幅图像而言、就存在
256N2 种可能的贴标签方式。我们把其中任意一种贴标签的方式称为一种配置
(configuration),任何一副
N×N 大小的灰度图像必然是这
256N2 种配置中的一种。
2. 邻域系统和子团(Neighborhood System and Cliques)
位置集
S={s1,⋯,sN} 上的一个位置
si 是通过邻域系统
(Neighborhood System) 和另一个位置
sj 建立联系。
2.1 邻域系统
位置集
S 上的邻域系统可定义为:
N={Nsi ∣ ∀ si∈S},其中
Nsi 是邻近
si 的一部分位置组成的集合。显然,
Nsi 描述了位置
si 和邻近的位置
sj 之间的关系:
(1) 位置
si 和自己不是相邻的,即
si∈/Nsi
(2) 邻域关系是相互的
(mutual),即
si∈Nsj⟺sj∈Nsi 【很关键的一点】
对于具有规则网格
(regular lattice) 结构的位置集
S(例如灰度图像),一种典型的定义邻域系统的方式是:
Nsi={sj∈S ∣ ∥sj−si∥2≤r,∀ j=i},表示以
si 为中心、
r 为半径的圆内所包含的所有
sj 组成了位置
si 的邻域
Nsi,如下图所示:

图1 引自于《Markov.Random.Field.Modeling.In.Image.Analysis》Figure 2.1
2.2 子团
子团
(Clique) 是位置集
S 中的子集
(subset),可以包括“单个位置
(single site)”
C1,“两个位置
(pair sites)”
C2,“三个位置
(triple sites)”
C3 等情形。
C1={si ∣ si∈S}
C2={ {si,sj} ∣ sj∈Ni,si∈S}
C3={ {si,sj,sk} ∣ sj∈Ni,sk∈Ni,sj∈Nk,si,sj,sk∈S},即:
si,sj,sk 彼此互为邻近点
(neighbor)
子团中的位置是有序的
(ordered),即:
{si,sj} 和
{sj,si} 是不一样的。
所有子团的并集记为
C=C1∪C2∪C3∪⋯,这里的
⋯ 表示所有可能的、更大的子团。
定义在规则网格
(regular lattice) 结构的位置集
S 上的子团类型
(type of a clique),取决于子团的大小、形状和方向。

图2 解释如下:
-
对于图1中
r=1 的邻域系统,
x 位置只和上下左右位置的像素点互为
Neighbor,
(a) 为 single-site clique,
(b) 和
(c) 为 pair-sites clique;但是
(d) 和
(e) 却不是为 pair-sites clique,因为
r=1 的邻域系统中对角线上的元素不满足互为
Neighbor 的条件。
-
对于图1中
r=2 的邻域系统,
x 位置和上下左右以及对角的像素点互为
Neighbor,
(a) 为 single-site clique,
(b),(c),(d),(e) 都为 pair-sites clique(其中一个为
x 点),
(f),(g),(h),(i) 都为 triple-sites clique(拐角处为
x 点),
(j) 为 quadruple-sites clique(其中一个为
x 点),这些 clique 中的 site 都满足互为
Neighbor 的条件。
不规则地点集
(irregular site set) 的邻域系统和子团:

引自于《Markov.Random.Field.Modeling.In.Image.Analysis》Figure 2.1 and Figure 2.2
在
C2 中,
f 和
m 两个位置不构成 clique,因为不满足互为
Neighbor 的条件。
3. Markov随机场(Markov Random Field)
3.1 随机场
令
F={F1,F2,⋯,FN2} 为定义在位置集
S={1,2,⋯,N2} 上的一族随机变量(每个位置
i 对应了一个随机变量
Fi),每个随机变量
Fi 可从离散标签集
L={l ∣ 0,1,⋯,255} 中取出一个整数
fi=0∼255 , 这样的一族随机变量
F 称为随机场。
如果将
N×N 大小的灰度图像(表示为一维)看成是一个随机场,那么,
N×N 灰度图像随机场
F 的一种配置
(configuration) 就表示为
(F1=f1,F2=f2,⋯,FN2=fN2),记为
(F=f),对应了随机场的一次实现
(realization)。
关于随机场
F 的联合概率
P(F=f)=P(F1=f1,F2=f2,⋯,FN2=fN2) 简写为
P(f)。
其中,位置
i 所对应随机变量
Fi 取值为
fi∈L 的概率
P(Fi=fi) 简写为
P(fi)。
3.2 马尔科夫性(Markovianity)
当满足以下条件时,称随机场
F 是定义在
S={1,2,⋯,N2} 上、关于邻域系统
N 的
Markov随机场
(Markov Random Field):
(1) 非负性:
P(f)>0,∀ f∈F
(2) 马尔可夫性:
P(fi∣fS−{i})=P(fi∣fNi),其中
fNi 表示邻域
Ni 中位置所对应随机变量
显然,马尔科夫随机场是一种概率模型。灰度图像随机场
F 的任意一种配置
f,都以一定的概率
P(f) 对应了一幅(与其它配置所对应图像不一样的)灰度图像;而且,
N×N 灰度图像中任意位置
(x,y) 处像素的灰度值,只与该位置
i (i=x×N+y) 的邻域
Ni 所包含的像素灰度值有关。
例如,在图
(1) 中如果用
r=1 定义邻域系统,
x 位置的像素值只和上下左右
4 个像素值有关;如果用
r=2 定义邻域系统,
x 位置的像素值只和包围该位置的
8 个像素值有关。这种“图像具有马尔科夫性”的假设,对于很多自然图像都是满足的。
3.3 Gibbs随机场(Gibbs Random Field)
如果随机场
F 的任一配置
(F=f) 的概率都服从
Gibbs 分布,就称随机场
F 是定义在位置集
S={1,2,⋯,N2} 上的 Gibbs随机场。
Gibbs 分布:
P(f)=Ze−T1U(f) ,归一化常数
Z=f∈F∑e−T1U(f), 显然
f∈F∑P(f)=1
其中:
(1) “归一化常数”
Z 称为配分函数
(partition function):所有配置
f∈F 对应的
e−T1U(f) 值之和
(2) 常数
T 为温度
(temperature):用于控制
Gibbs 分布的尖锐程度
(sharpness)
当
T 值很大,所有配置
f 的概率
P(f) 趋于相等;
当
T 值固定时,能量函数
U(f) 的值越小,
P(f) 越大。
(3)
U(f) 称为能量函数
(energy function):所有子团的势能之和
(sum of clique potentials)
U(f)=c∈C∑Vc(f) 其中,
Vc(f) 表示子团
c 上的势能。
关于Gibbs分布的解释可参考《数字图像处理(王桥)》P167-168
和Gibbs分布、Boltzmann分布有关的求解过程基本上都可以采用模拟退火过程。
在实际计算能量函数的时候,通常需要考虑
GRF 的两个特殊性质:齐次性
(homogeneity),各向同性
(isotropy)。
MRF/GRF 中的(空间)齐次性是对Markov链中(时间)齐次性的扩展。
一阶Markov链:
P(Xt+1=xt+1∣Xt=xt,⋯,X0=x0)=P(Xt+1=xt+1∣Xt=xt)
齐次的(homogeneous)一阶Markov链:
记
t 时刻的一步转移概率为:
P(Xt+1=j∣Xt=i)=pij(t), ∀ i,j∈ 状态空间
当一步转移概率
pij(t) 与时间
t 无关,即:
pij(t)=pij 时,为齐次
Markov链。
《Markov.Random.Field.Modeling.In.Image.Analysis》2.1节对
MRF/GRF 中的(空间)齐次性做了如下解释:
(a) MRF中的齐次性:
P(fi∣fNi) 与
i 在
S 中的相对位置无关
如果都采用相同的邻域系统,位置
j (j=i) 的邻域
Nj 应该和位置
i 的邻域
Ni 的结构是一样的,那么就有
P(fj∣fNj)=P(fi∣fNi),也就是说
P(fi∣fNi) 的计算与
i 在
S 中的具体位置无关,只要满足位置
i∈S 对应的
Ni 的结构一致
(b) GRF中的齐次性:
Vc(f) 与子团
c 的相对位置无关
以
pair sites 子团
C2 为例,假设位置
i,i′,j,j′∈S,如果
{i,i′} 与
{j,j′} 以相同的结构形成子团
ci={i,i′},cj={j,j′},ci,cj∈C2,那么这两个子团的能量函数
Vci(fi,fi′),Vcj(fj,fj′) 可以用一个通式
V2(fi,fi′),V2(fj,fj′) 来表示
即:
c∈C2∑Vc(f)={i,j}∈C2∑V2(fi,fj)
因此,齐次
(homogeneous)Gibbs分布的能量函数可以表示为
U(f)={i}∈C1∑V1(fi)+{i,j}∈C2∑V2(fi,fj)+{i,j,k}∈C3∑V3(fi,fj,fk)+⋯
一种很重要的情形:仅考虑“
single site子团”
C1 和“
pair sites子团”
C2 的情况,此时的能量函数表示为
U(f)={i}∈C1∑V1(fi)+{i,j}∈C2∑V2(fi,fj)=i∈S∑V1(fi)+i∈S∑j∈Ni∑V2(fi,fj)
这时
P(fi∣fNi)=P(fNi)P(fi,fNi)=∑fi′∈LP(fi′,fNi)P(fi,fNi)分子:Fi=fi,分母:Fi=fi′=∑fi′∈Le−[V1(fi′)+∑j∈NiV2(fi,fj)]e−[V1(fi)+∑j∈NiV2(fi,fj)]
3.4 Markov与Gibbs的等价性
-
Markov随机场的特点在于考虑了位置集
S 的局部特性,提供了随机场的条件分布(条件分布满足马尔科夫性),实现起来比较困难;
-
Gibbs随机场的特点在于考虑了位置集
S 的全局特性,提供了随机场的联合分布(
S 上的随机场
F 的每个配置
f 服从
Gibbs 分布),可以借助空间上的邻域系统来实现(选择不同的子团类型和对应的能量函数形式,可以产生不同形式的GRF)。
Hammersley−Clifford 定理建立了
MRF 和
GRF 之间的一一对应关系:如果随机场
F 具有局部
Markov 性,那么随机场
F 具有
Gibbs 分布;反之,如果随机场
F 具有
Gibbs 分布。

假设
P(f) 是位置集
S 上的关于邻域系统
N 的Gibbs分布,那么
P(fi∣fS−{i})=P(fS−{i})P(fi,fS−{i}) , 记 (F=f)=(Fi=fi,fS−{i})=∑fi′∈LP(fi′,fS−{i})P(f), 记 fi′ 为 L 中某个值,Fi 的取值为 fi′=∑fi′∈LP(f′)P(f) , 记 (F=f′)=(Fi=fi′,fS−{i})=∑fi′∈Le−∑c∈CVc(f′)e−∑c∈CVc(f)=∑fi′∈L[e−∑c∈AVc(f′)⋅e−∑c∈BVc(f′)]e−∑c∈AVc(f)⋅e−∑c∈BVc(f)
其中,
A 为包含位置
i 的所有子团,
B 为不包含位置
i 的所有子团,显然分母中的
e−∑c∈BVc(f′) 与随机变量
Fi=fi′ 的取值无关,可以放到
∑fi′∈L 的外面。
因此,可得到:
P(fi∣fS−{i})=∑fi′∈L[e−∑c∈AVc(f′)⋅e−∑c∈BVc(f′)]e−∑c∈AVc(f)⋅e−∑c∈BVc(f)=e−∑c∈BVc(f′)⋅∑fi′∈L[e−∑c∈AVc(f′)]e−∑c∈AVc(f)⋅e−∑c∈BVc(f)=∑fi′∈Le−∑c∈AVc(f′)e−∑c∈AVc(f)
这就说明
P(fi∣fS−{i}) 只和包含位置
i 的所有子团的势能有关,对于满足
c∈B 的子团,实际上就是3.3节中的
P(fi∣fNi)。这说明了,在定义了邻域系统
N 的情况下,
GRF 和
MRF 是等价的。
4 图像的MRF建模
4.1 图像随机场
将一幅
N×M 大小的灰度图像建模为随机场:
(1) 假设图像大小为
N×M,位置集
(site set) 按照图像扫描顺序排列
即:
S={0,1,⋯,m×M+n,⋯,N×M},位置集中的
m×M+n 表示图像中
(m,n) 位置处的像素
(2) 只考虑灰度图像时,标签集
(label set) 为
L={0,1,⋯,255}
(3) 在位置集
S 上定义一族随机变量
Fi 组成了图像随机场
F={F1,⋯,Fi,⋯,FN×M} , i∈S
(4) 随机场
F 的一种配置
(F=f) 表示
(F1=f1,⋯,Fi=fi,⋯,FN×M=fN×M) , fi∈L
我们观测到了图像
y={y1,⋯,yi,⋯,yN×M},观测图像
y 也对应了随机场
F 的一种配置或一次实现,即:
(F=y)=(F1=y1,⋯,Fi=yi,⋯,FN×M=yN×M)
4.2 图像退化的似然描述
假设我们观测到了一幅退化的(有噪声的)图像
y,原始图像为
f。对于该图像的第
i 个像素,满足
yi=φ(fi)+εi,例如高斯噪声为
εi∼N(0,σi2), i∈S。
考虑图像的退化模型
P(y∣f),一般我们假设“退化过程关于不同位置的像素值是相互独立的”,也就是:
P(y∣f)=i∈S∏P(yi∣fi)=i=1∏N×MP(yi∣fi)
上式可以认为是“图像退化的似然描述”,因为观测图像
y 是已知的、固定不变的,概率值
P(y∣f) 对于
f 的变动来说,可以称为“似然”。
可参考《数字图像处理(王桥)》§7.1 (P159) 和 §7.3.4 (P170)
对比关于观测数据集
D={x1,x2,⋯,xN} 的似然函数
p(D∣θ)=p(x1,x2,⋯,xN∣θ),这里的“似然”是指概率值
p(D∣θ) 的大小对于参数
θ 的变动而言,可参考《正态分布的最大似然估计》。
例如,高斯似然模型
εi∼N(0,σi2),退化模型为
P(yi∣fi)=2π
σi1e−2σi2[φ(fi)−yi]2,可得到
P(y∣f)=i∈S∏P(yi∣fi)=∏i=1N×M2πσi2
1e−U(f), 其中U(f)=i∈S∑2σi2[φ(fi)−yi]2
4.3 MAP-MRF模型
通过建立图像的随机场模型、以及对图像退化过程进行似然描述,就可以获得对图像的概率描述。有了这些概率工具,就可以去考虑“通过观测图像估计真实图像”之类的估计问题,最常用的框架就是最大后验估计
(Maximum A Posteriori, MAP)。
(1) 从概率的角度来看,要从一幅包含噪声的观测图像中恢复原始图像,就是要得到随机场
F 的某一种配置
(F=f),该配置的概率值最大。
在MAP-MRF框架中图像真实值
x 的最佳估计
x^:
x^=fargmaxP(f∣y)
也就是,在已知观测值
y 的条件下、具有最大后验概率时的配置
f 作为原始图像的估计
(2) 贝叶斯推理:
P(f∣y)=P(y)P(y∣f)P(f)∝P(y∣f)P(f)
其中,
P(f) 是可能的原始图像
f的先验概率,
P(y∣f)=i=1∏N×MP(yi∣fi)是图像退化的似然模型
条件概率值
P(y∣f) 表示可能的原始图像
f 退化为观测图像
y 的似然值(可能性)
(3) 图像的MAP-MRF框架就为:
f^=fargmaxP(f∣y)=fargmax{lnP(y∣f)+lnP(f)}
如果
P(f) 服从均匀分布,最大后验估计就等价于最大似然估计
因此,图像的
MRF模型就是根据实际需要,选择合适的退化模型
P(y∣f) 和图像先验模型
P(f) 来进行贝叶斯推理。
5. 图像分类的例子
对于
N×M 灰度图像的随机场建模如4.1节所描述,位置集
S={0,1,⋯,N×M}。对于图像分类问题(图像分割),标签集
L={1,⋯,M},其中
M 表示类别数。
退化模型:假设图像退化的似然模型
P(y∣f) 为高斯型:
P(yi∣fi)=2π
σfi1exp[−2σfi2(yi−fi)2], ∀ i∈S
此时,
fi∈{1,⋯,M} 表示类别的索引,而
σfi2 表示第
fi 类的方差。
先验模型:在MAP-MRF框架中,图像先验模型
P(f) 采用
Gibbs分布:
P(f)=Ze−T1U(f)
在图像分类问题中,只考虑
pair sites子团。考虑图1中的
r=1 邻域系统,其子团类型为图2中
(b),(c) 两种结构,
pair sites子团的能量函数可定义为:
V2(fi,fj)=βγ(fi,fj),γ(fi,fj)=⎩⎨⎧−1+1, fi=fj, fi=fj,∀ i,j∈S
也就是说,在某个恒定温度时,当两个位置的像素值相等时,子团势能降低,能量函数也降低,从而使得
P(f) 的概率越来越大。

图中为二分类的结果,除了边界处的子团会增加总能量之外,其他平坦区域的子团均会使得总能量值下降。
以图中的二值分割为例,
V2(fi,fj)=βγ(fi,fj) 实际上表示的是边界的长度。
显然,边界越长(不可能整幅图像都是边界),能量函数值越大,这种情况出现的概率就越低。
齐次
Gibbs分布的能量函数就为:
U(f)={i,j}∈C2∑V2(fi,fj)={i,j}∈C2∑βγ(fi,fj)
因此,图像分类就建模为一个最优化问题:
f^=fargmaxP(f∣y)=fargmax{lnP(y∣f)+lnP(f)}=fargmax⎩⎨⎧−i=1∑N×M(ln2π
σfi+2σfi2(yi−fi)2)−T1{i,j}∈C2∑βγ(fi,fj)⎭⎬⎫=fargmin⎩⎨⎧i=1∑N×M(ln2π
σfi+2σfi2(yi−fi)2)+T1{i,j}∈C2∑βγ(fi,fj)⎭⎬⎫
对该优化模型的求解,可采用
ICM,
Gibbs采样,
Metropolis采样等随机优化方法。