1.坐标系
根据维基百科,坐标系是指:定义一个n维系统,能够使每一个点和一组n个标量组成一一对应的系统。[1]
在坐标系里,有几个关键概念。
第一个关键概念是维度(Dimension)。维度是指通过一定标准,把一系列变量放在一起的度量方式。维度本身意味着度量的方式。[2]
第二个关键概念是标量(Scalar)。标量,又称为纯量,只有大小,没有方向。在单个维度上,度量方式肯定是标量。[3]但多个维度的度量,就可以是向量。[4]因为多个维度上可以确定方向。
第三个关键概念是系统。系统是指一系列关联的群体,由按照某种按照一定规则的个体组成。
通过这几个概念可以得知,坐标系是一定维度的,可以确定一定标量的系统。
最常见的坐标系是笛卡尔坐标系。[5]笛卡尔坐标系是由法国数学家笛卡尔引进的一种坐标系。笛卡尔的坐标系的特点是:1)二个维度;2)两个维度正交于远点;3)横坐标系右为正,竖坐标系上为正。(如图1所示,引自维基百科)笛卡尔坐标系可以扩展到三维。
图1 笛卡尔坐标系
2.XOY和ST坐标系
笛卡尔坐标系一般是XOY坐标系。即原点为O点,横轴为X轴,纵轴为Y轴。但现实上,也存在很多笛卡尔坐标系的变种。如OpenDrive里,用到了ST坐标(图2)。
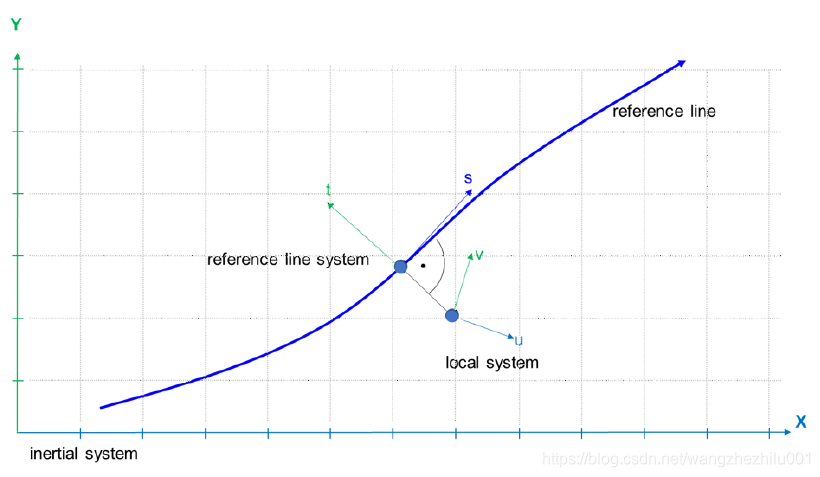
图2 XOY坐标系和ST坐标系
OpenDrive是针对道路网络的逻辑描述的公开文件格式。OpenDrive文件规范要符合XML规范;同时,OpenDrive文件也定义了各种符合交通场景的各种定义。[6]
OpenDrive里有多种坐标系。其中最主要两个坐标系和XOY坐标系和ST坐标系。
3.OpenDrive里的XY和ST
在OpenDrive里,XY坐标和ST坐标是最常见的两种坐标系。XY坐标系的主要点为X点和Y点。可以理解为坐标系的点。
另一个坐标系为ST。ST的算法是:
1)确定某个线为基准线(基准线一般为某个道路的0车道);
2)在基准线上确定某点为原点;
3)沿基准线的方向为S方向,和S方向左手边垂直方向为T方向;
4)S方向始终是基准线方向,T方向始终与S方向垂直;
5)某一点的S值为沿着基准线和S原点的距离(平行于S基准线),某一点的T值为T方向的距离。
一般来说,在Open Drive里,道路可以分为4种基本图形:1)直线;2)弧线;3)螺旋线;4)三次多项式。这几种图形组合为几种图形。在一个道路内部,主要通过ST确定和基本道路的关系。如需确定XY,则可通过ST进行转换。
参考文献:
[1]维基百科,坐标系,https://zh.wikipedia.org/wiki/%E5%9D%90%E6%A8%99%E7%B3%BB
[2]维基百科,维度,https://zh.wikipedia.org/wiki/%E7%B6%AD%E5%BA%A6
[3]维基百科,标量,https://zh.wikipedia.org/wiki/%E6%A0%87%E9%87%8F
[4]维基百科,向量,https://zh.wikipedia.org/wiki/%E5%90%91%E9%87%8F
[5]维基百科,笛卡尔坐标系,https://zh.wikipedia.org/wiki/%E7%AC%9B%E5%8D%A1%E5%B0%94%E5%9D%90%E6%A0%87%E7%B3%BB
[6]OpenDrive文件定义,http://www.opendrive.org/
[7]OpenDrive格式文档下载,http://www.opendrive.org/download.html